 泊車一體化HMI體驗設計升級
泊車一體化HMI體驗設計升級
內容導讀
02 綜合分析定策略
03 一體化體驗升級
04 結語
「01 智能泊車產品概述」
百度智能泊車產品從2016年起步,經過多年的探索,已沉淀出成熟穩定的自研計算單元(Apollo Computing Unit,ACU),并于2020年底開始在長城、廣汽等多個車型量產。
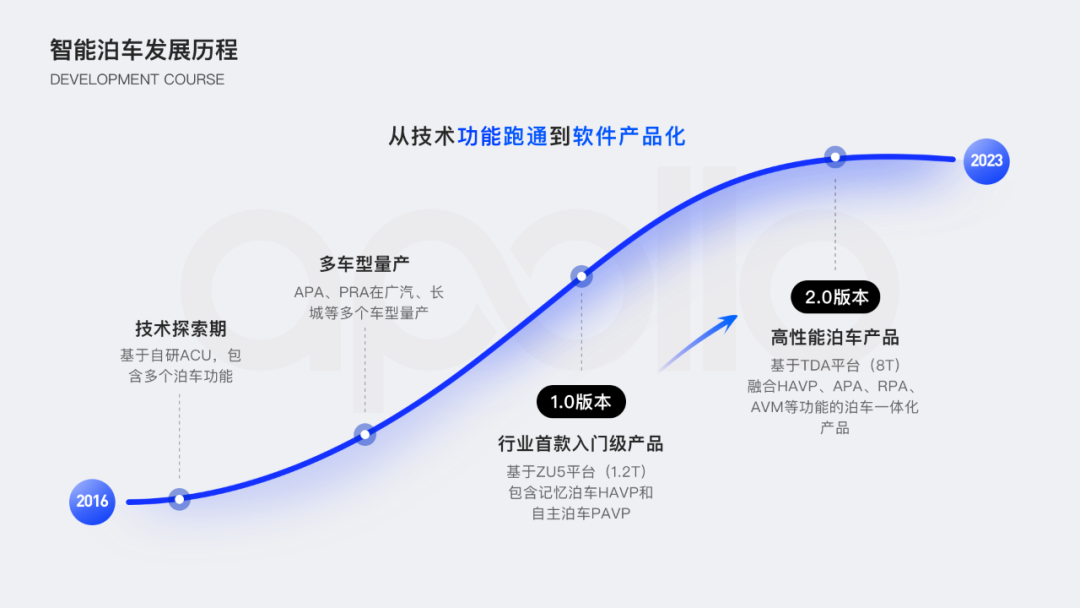
△ 圖1百度阿波羅智能泊車發展歷程
早期的泊車產品功能包括自動泊車(Auto Parking Asist,APA)、遙控泊車(Remote Parking Asist,RPA)、PAVP(Public Apollo Valet Parking,PAVP)、HAVP(Home-zone Apollo Valet Parking,HAVP),主要是以技術供應商的模式與車企合作。設計師主要在商務溝通階段,進行概念驗證(Proof of Concept,PoC) demo 的設計支持,以向客戶展示基本功能邏輯,證明技術可行性,從而輔助銷售簽單。
2021年6月開始,業務側開啟智能泊車主線戰略,依托選定車型,自主設計HMI產品,試圖以完整優質的HMI設計樣板,助力車企打造更好的泊車體驗。設計側基于歷史產品能力,依托unity渲染引擎,進行了兩個產品的體驗設計升級:使用視覺感知建圖的記憶泊車HAVP、面向已采集高精地圖數據公共域停車場的自主泊車PAVP。
HAVP在車機端使用,用戶在同一個停車場記憶多條路線,再次進入停車場匹配上路線后自主巡航泊車。但1.0版本定位是低成本入門級產品,所依托的硬件平臺算力較低,導致實時感知元素少且穩定性差,可記憶路線長度短,巡航速度低。整體產品無論是駕駛體感、還是人機交互體驗,均不太理想。
PAVP主要在手機端使用,用戶到達下車點后離車,車輛自主行駛至固定車位并泊車。由于PAVP需要提前采集停車場高精地圖,落地成本相對高昂,后續逐步減少對其的投入。
2022年開始,隨著計算平臺ACU的算力升級(從1.2T升級到8T),產品側規劃匹配行泊域控制器一體化趨勢,探索融合行車、泊車的行泊一體方案,泊車域產品進入2.0階段——融合HAVP、APA、RPA、AVM等功能的泊車一體化產品。設計側則考慮進行交互框架、視覺風格、三維可視化場景的全面升級,打造極致的泊車一體化HMI體驗。
「02綜合分析定策略」
泊車一體化HMI設計,并不是簡單地功能整合,也不是視覺層面的簡單換膚。為了讓設計發揮更大的價值,我們深入業務了解產品歷史背景、技術邏輯及當前限制,進行深度競品分析和用戶實車體驗評測。在此基礎上我們梳理繪制了當前產品的全場景用戶旅程圖,從用戶訴求、當前產品現狀和技術限制等多個角度進行綜合分析和設計洞察。

△
圖2智能泊車全場景用戶旅程圖
最終當前智能泊車產品的問題可以歸結為以下幾個方面: 1)產品現狀
先前各個子產品HAVP、APA、RPA、AVM主要是以技術合作的方式進行車型落地,大多無成熟穩定的前端界面。而且子產品功能雖然多但不精,并未從用戶需求匹配的角度做價值權衡。
2)技術限制
HAVP記憶泊車屬于高階智能泊車產品,對算力依賴較大。歷史硬件平臺算力極低,將要升級的新一代平臺雖然有所進步,但仍只有競品的一半。包括算力在內的其它技術限制,使得產品的使用限制較大,包括可使用范圍、開啟條件、任務等待時間等等。
3)設計問題
由于前期對業務的理解不夠深入,主要是跟隨產品規劃進行設計,當前版本的智能泊車產品可用性問題較多,相對競品使用流程繁瑣,提示引導不夠簡明清晰。另外由于技術限制和開發落地還原度問題,整體界面不夠精致,無法匹配智能、科技的產品定位。
4)用戶體驗
由于當前技術的局限,當前的智能泊車產品很難達到用戶的理想狀態,即完全無人泊車。通過分析用戶使用場景可以看出:當前產品很難保證使用場景的連續性,提高泊車效率(尤其對于老司機),用戶對其價值的感知有限;需要用戶學習新的操作流程,學習理解“出/入庫”、“固定車位/隨機車位”等相對抽象的概念。
綜合以上分析,我們與產品側積極溝通,在競品分析的基礎上進行整艙級概念方案的討論探索,并最終達成設計目標如下:通過泊車一體化設計,構建更一致、流暢、智能的體驗,從而提升用戶滿意度和使用頻率。
為實現這一設計目標,用研同學進行了衡量指標和評測方案的制定,設計側針對關鍵問題,制定出相應的設計策略,并在后續的設計落地實踐。

△
圖3設計目標和策略制定
「03一體化體驗升級」
策略1:3D輕空間設計語言,營造智能情感氛圍
智能駕駛類產品相對“黑盒”,僅通過二維平面的文字和圖形,用戶很難了解系統內部的運行邏輯和狀態,往往會由于缺少安全感而不敢使用。因此泊車HMI設計的基礎是構建一個動態的3D可視化場景,具象、直觀傳達AI所感知的物理世界,讓駕駛員理解系統的運行狀態和邏輯,顯著提升系統的透明度和智能感,從而提升人對智能系統的信任。
舊版本產品初步嘗試使用3D場景可視化,但由于缺乏經驗及系統研究,最終落地效果不夠美觀精致,缺乏品牌感知和吸引力。新版本產品在設計伊始就進行了多輪視覺風格探索,并通過定性研究了解用戶對于3D UI的視覺偏好,包括數字模型的精細度、色彩、布局、展示視角等,最終確定“沉浸、自然、細膩、靈動”的空間設計語言,進行了全局視覺效果升級,營造智能情感氛圍。
△
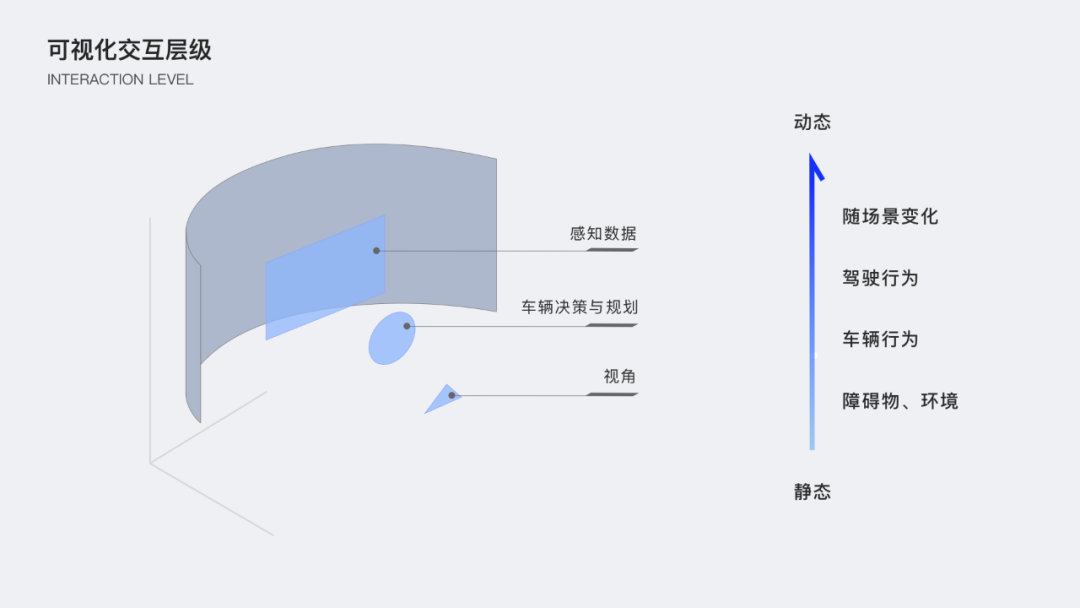
圖43D駕駛場景可視化層級

△
圖5記憶泊車3D可視化場景效果
◎ 兼顧真實與傳達效率的3D世界
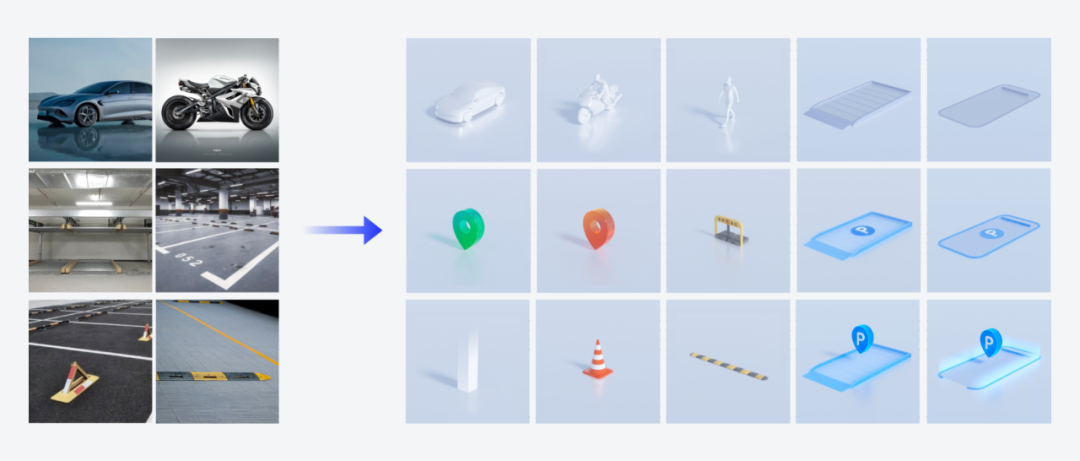
首先,要保證一定程度的真實性,讓用戶快速識別并理解元素。由于停車場環境、設施元素差異較大,因此我們需要綜合分析真實世界的元素形態,提取最典型、通用的識別特征,構建相應的3D數字模型,保證各視角的美觀和識別度。同時,所有模型要保證符合真實世界的比例關系。
其次,根據視覺識別的優先級和業務訴求,明確主次關系,優化模型。一般自車模型需要傳達自車的狀態和意圖(左右轉、停車等),所以自車模型要求貼圖精致且車輛子部件獨立;而其他車輛能體現有無即可,因此可以適當精簡模型面數,提升性能。
最后,對于現實世界中不存在的虛擬元素,比如起終點標識、感知環、規劃線等,匹配空間設計語言進行視覺化設計,以體現產品的科技屬性。
△
圖6提取真實環境視覺特征構建3D模型
◎ 美感與質感兼具的靈動輕空間
模型元素只是構建3D世界的骨架,我們還需要定義風格和色彩,讓數字世界靈動起來。色彩方面通過品牌藍的調整,添加輕盈的色彩漸變,創造出具有科技感的沉浸視覺氛圍。

△
圖7情緒板
對于靜態模型和場景渲染,我們運用漸變光影、輕量極簡、細膩材質等手法營造整個三維場景的空間質感;針對互動性元素,我們借助“光”貫穿全頁面狀態,輔助傳達交互行為、狀態反饋等信息,營造靈動氛圍,提升感官愉悅。
比如,當泊車發現車位時,可停車位發亮的同時周圍會出現光暈,表示當前可泊入此車位,像時光穿越機,引導用戶使用。

△
圖8 動態空間質感及可泊車位光效
在泊車完成時,在場景細節處增加車位框動態效果,增加空間縱深感,并通過飄起的粒子元素營造儀式感。

△?
圖9泊車完成的細膩動效
對于技術無法解決的問題環節,通過靈動動效,轉移用戶注意力,提升各環節銜接的流暢度。
比如技術無法解決的等待建圖,通過流暢細膩的動效營造獨特的科技氛圍,緩解用戶等待焦慮;當路線生成后,通過禮花綻放、以及配合鏡頭的轉場效果來查看已記憶的路線,增強用戶對已學路線的感知,提升用戶成就感。

△
圖10記憶完成后等待建圖的轉場動效
策略2:用戶視角的一體化融合框架,降低學習成本
◎ 用戶畫像及行為分析
舊版本智能泊車的子產品,以提供功能為主,對目標用戶并沒有清晰定義。新版產品探索設計的過程中,用研同學相繼進行了《智能泊車車主使用情況調查》和《APA高頻場景調研》。經過定性和定量的調查分析,可以得到以下結論:
① 當前智能泊車產品的主要用戶是新手小白和嘗鮮科技控。新手小白是基本盤,他們可明顯感知到效率的提升,對泊車需求度較高;嘗鮮科技控,樂于進行新事物的嘗試和研究,是可能爭取到的用戶。
② 當前市場上已提供的智能泊車產品中,使用APA的比例遠高于記憶泊車、智能召喚和遙控泊車。
③ 雖然用戶對泊車輔助功能的有很多期待,但由于智能泊車技術的成熟度不夠和法規限制,目前還無法真正實現自主尋找空車位、人不在車上的自主泊車和遠程召喚等挑戰場景的訴求。出于安全考慮,用戶更傾向使用成熟度較高的人在車附近的APA自動泊車。

△
圖11智能泊車用戶畫像及使用行為分析
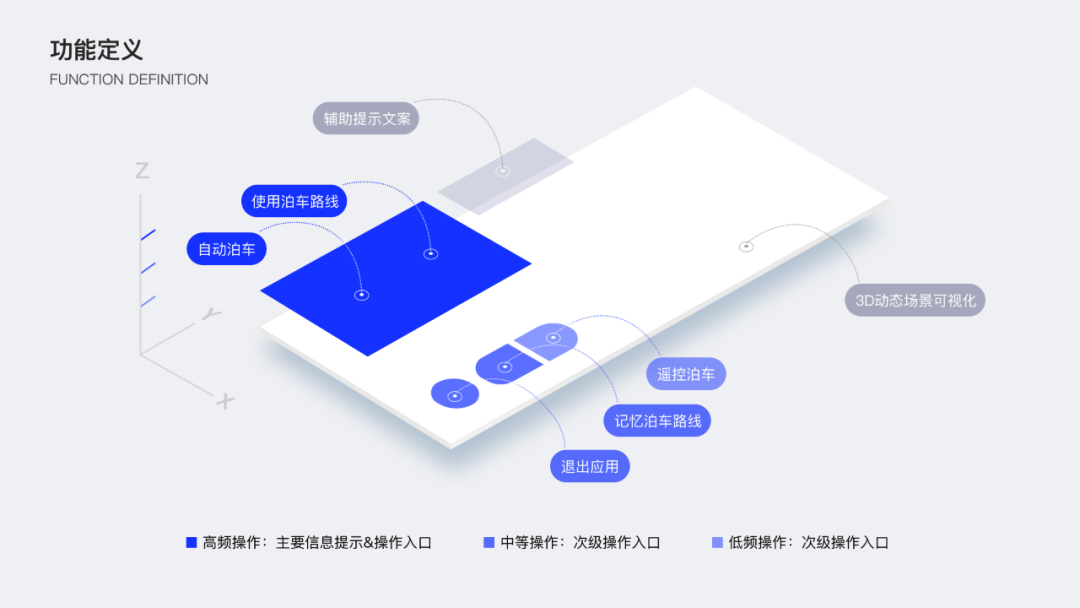
◎ 按用戶使用頻率組織功能
根據上述分析,在人駕泊車場景首頁,按用戶使用頻率和場景范圍,組織APA、HAVP記憶和使用、RPA等功能入口和操作優先級:
自動泊車和使用泊車路線(已有記憶路線)最為頻繁,因此放置在主要信息提示和操作入口區域。根據車輛所處場景,自動觸發相應功能的信息提示和操作——在陌生停車場默認推薦APA,在已記憶路線的停車場優先推薦路線,點擊可在兩者間靈活切換;
一個停車場往往只記錄一次路線,遙控泊車需要在APA和HAVP使用后才能被觸發,使用頻率不高,因此放置在下方的次級入口區域。
△
圖12按用戶使用范圍和頻率組織功能

△ 圖13記憶泊車與自動泊車融合切換
策略3:整艙級多通道溝通,提升信息觸達效率
◎ 觸控儀表協同,提升觸達效果
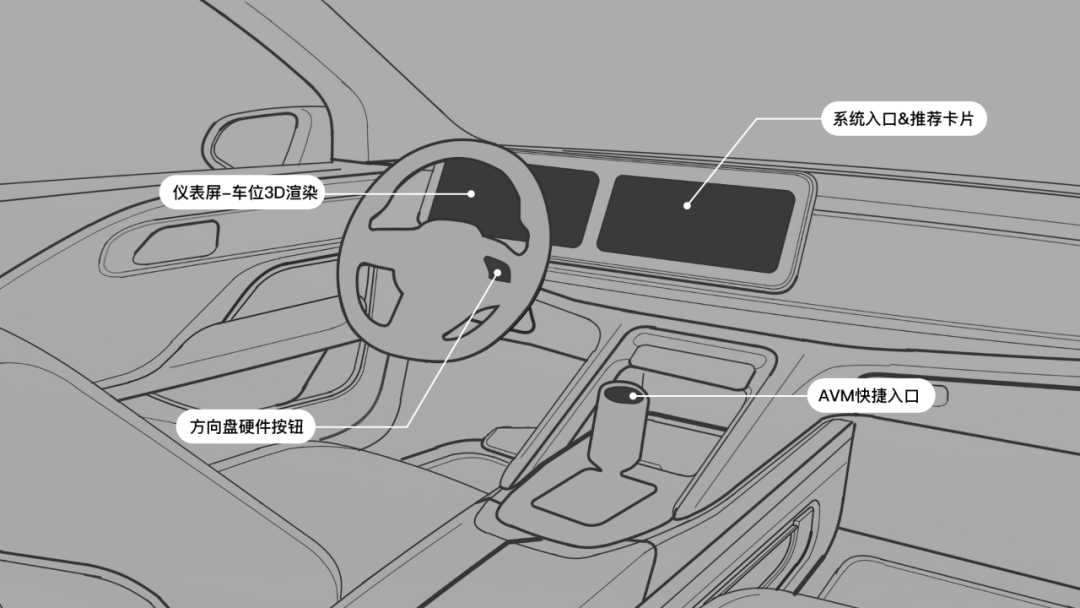
智能泊車屬于非剛需產品,根據fogg行為模型,行為=動機 × 能力 × 觸發,要想讓用戶使用,首先要增加功能觸點,讓用戶感知到。
通過儀表屏空閑車位的3D渲染,傳達泊車可用信息,讓用戶在手動駕駛視角就能清晰感知智能泊車可用,產生觸達的動機。在啟用入口上,綜合考慮座艙軟硬件,便于用戶在需要時快速進入功能。
△
圖14智能泊車功能的整艙觸點設計
◎ 視聽覺融合提示,增強信息傳達效果
座艙是一個空間整體,涉及多種信息交互和傳達通道,大部分座艙都已具備視覺、聽覺兩類通道,有些還會涉及觸覺、嗅覺。根據研究,多通道組合的提示方式優于單通道。在泊車一體化HMI中,我們對視覺、聽覺提示進行了深入的研究和梳理,并從播報優先級、播報組合、播報時機、文案和提示音品質等方面進行了全方位優化。
在完成所有的流程設計后,我們統一梳理了需要提示的關鍵行為節點和特殊場景,然后根據駕駛權狀態(車駕/人駕)、場景緊急程度(緊急/一般)、要傳達的情緒(正向/負向)確定提示的多通道類型和提示音效。

△
圖15多通道融合提示策略
比如,用戶駕駛車輛搜索車位時,視覺通道被占用無法頻繁查看中控HMI,搜到空閑車位可能會被忽略,因此,通過正向積極的音效進行提示告知,并播報操作提示“找到車位了,請停車”,界面提示文案同步變化。因為語音播報打擾度過高,故只提醒一次,音效和視覺文案將持續顯示,以避免語音播報結束后難以回溯導致的引導失效的問題。若用戶按引導停車,則增加卡片操作引導,語音和文字跟隨變化,讓操作更加清晰易理解。

△ 圖16搜索車位中的視聽覺提示示例
策略4:場景化智能主動交互,提升操作流暢度
“智能”意味著系統能靈活適應情境,主動感知并理解周邊環境的信息,理解用戶意圖,并在恰當的時候主動與用戶交互,提供最優的信息和操作,甚至自動幫用戶完成任務。要達到“想你所想、做你想做”的自然狀態,除了通過技術進步增加情境感知精確度和預測準確度,也可以根據體驗設計師對用戶場景的同理心,定義并優化不同場景下的主流程,并提供異常情況下的自然過渡。
◎ 場景化流暢運鏡,智能呈現最優信息
由于3D場景存在透視,特定時刻從某個角度觀看必定會損失掉其它角度的信息,我們的產品以3D場景可視化為基礎貫穿整個使用過程,用戶需要觀看并完成特定操作,不同場景下用戶關注的重點不同,攝像機的觀看視角也應該進行動態調整。
綜合不同場景的信息查看和操作訴求、傳感器感知范圍和視覺美觀度,我們定義了不同場景下最佳觀看視角,不斷調試視角間的變化效果,最終實現了全場景動態視角,一鏡到底,兼顧操作效率和信息最大化表達。

△
圖17場景化動態視角策略
舉例來說:
①自動泊車過程,初始會關注自車和目標車位的相對位置,以及自動泊車的路徑。隨著車輛逐漸接近車位,則需要關注車輛周邊障礙物情況。因此視角隨著車輛與車位的距離,逐漸拉近拉平,接近俯視狀態,以更好觀察車輛與周邊障礙物的距離。

△
圖18自動泊車過程視角變化
②自動泊車涉及觀看和操作,這兩者視角有所差異。觀看狀態以跟車視角為主,便于用戶建立空間位置感知,比如駕駛車輛搜索車位的狀態。當用戶停車選擇可用車位,攝像機需要拉高近俯視,以顯示更大范圍的可選車位,且保證有足夠的熱區以便于用戶快速選擇車位。
△
圖19觀看和操作的視角差異
③對于開始或結束等相對明確的狀態,可使用較大的、有儀式感的視角變化,自然提示用戶場景的變化。下圖是從開始啟動到搜索車位的變化視角。

△
圖20儀式感視角轉場
◎ 場景觸發的主動預測式交互
記憶路線是一個學習成本相對較高的流程,有很多術語、概念。為減少用戶的記憶負擔,提高記憶路線的成功率,出入庫均進行了自動設置終點的優化:對于入庫,自動泊車后自動設置終點;而出庫,能行駛的路線越長越好,因此超出路線范圍后將自動設置終點。

△
圖21記憶路線自動設置終點
為提高記憶泊車的場景靈活性,使用已記憶路線自主泊車的過程中,也支持自動泊入路線沿途的空閑車位。為了保證和APA自動泊車流程的自然銜接,我們考慮不同場景下的策略:使用路線前往路線終點車位的過程中,用戶未主動剎停,則車輛會自動前往終點自己的車位;若用戶主動剎車且周邊有空閑車位,則意味著附近用戶更想泊入附近的車位,因此會進行多通道提示,引導用戶使用自動泊車。
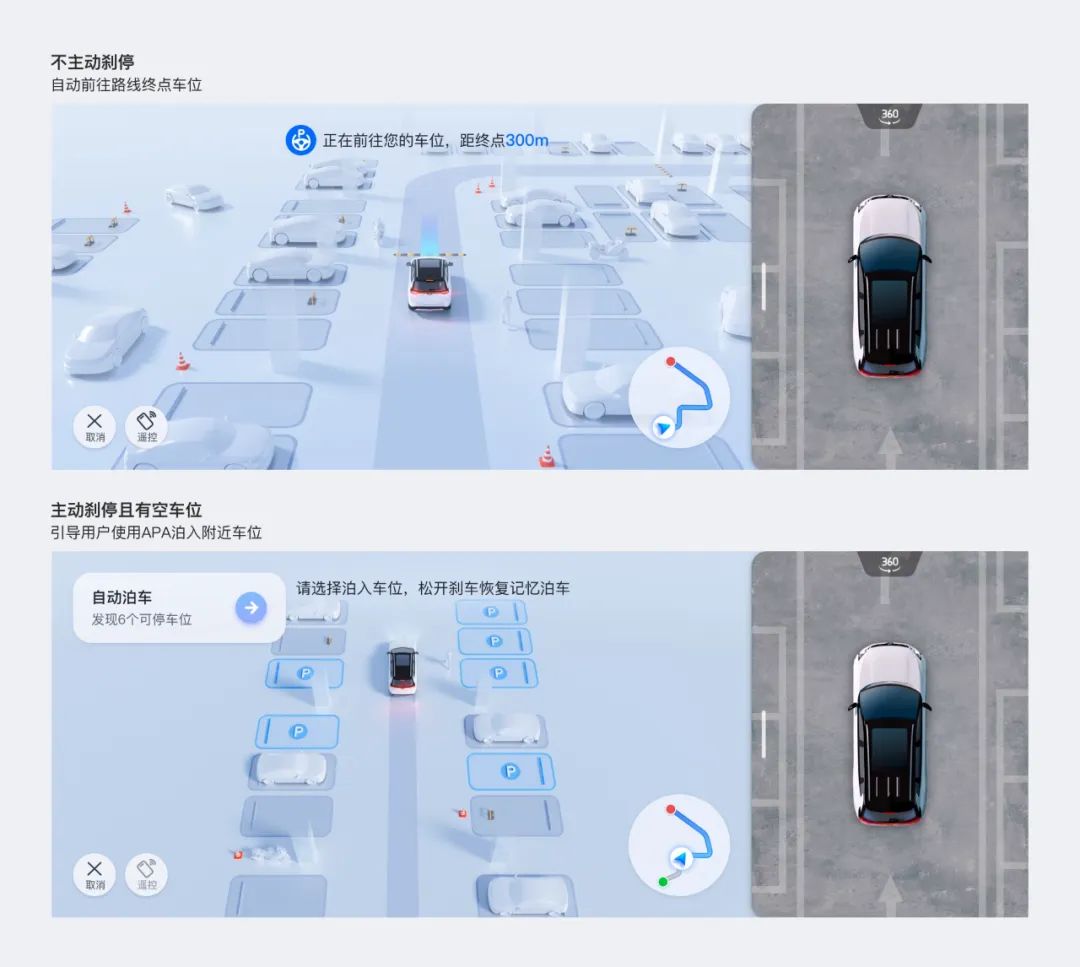
△ 圖22使用路線泊入沿途車位的智能提示
「04結語」
為了量化體驗進步,用研同學結合業務特點,制定了本競品實車對比評測計劃,每個季度組織用戶在同一路線駕駛本競品車輛完成相同的任務,并按照衡量標準進行滿意度評分。從圖中可以看出,到2023年Q1,經過一年的奮戰,泊車一體化產品體驗逐步提升,并超越行業頭部競品。
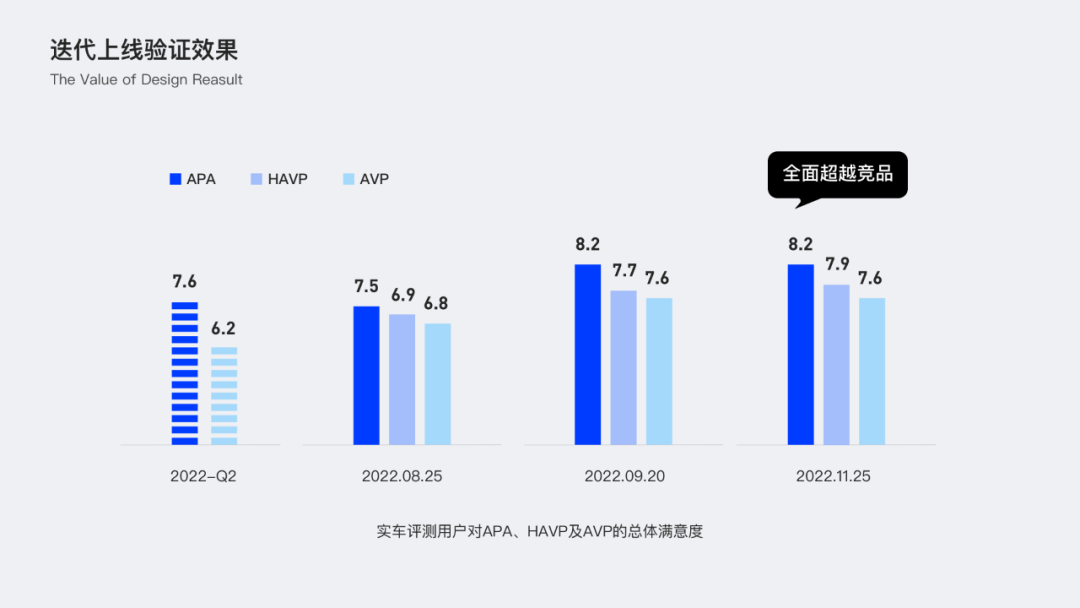
△ 圖23 本競品實車評測的用戶滿意度變化
回顧過去的一年,泊車一體化設計團隊秉承“打造極致的泊車HMI體驗”,始終站在用戶的角度,不斷探索優化使用流程,持續完善邊緣場景,打磨設計細節和品質。2023年8月,泊車一體化作為百度行泊一體的一部分在嵐圖項目落地,獲得了用戶的好評。我們的設計也先后獲得2022年紅點獎和2023年K-design金獎,得到了設計同行的認可。

△
圖24 相關榮譽
新技術產品的出現和接受往往需要一定時間,而且其初始體驗不一定愉悅,輔助駕駛類產品也是如此。雖然目前的技術能力離實現目標尚遠,但我們不能觀望等待。作為體驗設計師,我們有責任用專業的設計方法,基于技術構建體驗優秀的產品,讓更多用戶接觸、反饋并參與產品定義,從而持續牽引技術趨近于理想狀態。泊車一體化HMI只是泊車智能化探索過程的一個階段嘗試,希望大家能有所啟發,共同探索智能泊車的理想未來!
-
HMI
+關注
關注
9文章
585瀏覽量
48461 -
一體化
+關注
關注
0文章
246瀏覽量
14404 -
智能泊車
+關注
關注
0文章
20瀏覽量
7759
原文標題:泊車一體化HMI體驗設計升級
文章出處:【微信號:baiduidg,微信公眾號:Apollo智能駕駛】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
智慧園區一體化管理平臺的功能應用
光儲充一體化電站建設解決方案

《嵌入式機電一體化系統設計與實現》讀后感
智慧園區一體化管理平臺功能
安消一體化平臺建設方案
Model3A 7寸觸摸屏應用于一體化步進電機HMI控制方案

什么是機電一體化?它有哪些應用?
室內外一體化定位技術的普及和應用
什么是通感算一體化?通感算一體化的應用場景

乘用車一體化電池的發展現狀和未來趨勢

鴻蒙原生應用/元服務開發-新版本端云一體化模板體驗反饋
物聯網農業一體化灌溉泵站






 工商網監
工商網監
評論