 利用腸蠕動驅動的微針機器人實現生物藥物的無痛口服遞送
利用腸蠕動驅動的微針機器人實現生物藥物的無痛口服遞送
與注射給藥相比,口服給藥對專業技術的要求更低,并且患者的可接受度更高,一直是首選的給藥方式。然而,多肽、蛋白質和核酸等生物藥物極易在胃腸道惡劣的生化環境中失活,并且很難通過胃腸道黏膜層細胞的吸收屏障,直接口服的生物利用度極為有限(小于1%),導致這些生物藥物目前仍然主要通過腸外注射進行遞送。而腸外注射,尤其是像胰島素這種需要長期進行注射的藥物,難免會引起疼痛和皮膚感染。因此,亟需克服生物藥物口服遞送的困境,提高口服藥物的生物利用度。
雖然目前已經有研究開發出了黏附貼片、水凝膠滯留等延長藥物釋放時間的緩釋裝置,但是并沒有真正克服消化道的生理屏障,臨床效果仍需驗證。而胃腸道微針裝置直接利用載藥微針刺入缺少痛覺神經的胃腸壁進行給藥,既可以直接突破胃腸道的吸收屏障,同時也不會引起患者的疼痛和不適,是一種新興的口服給藥方式。然而,之前研究中提出的彈簧或氣球驅動的一次性觸發模式難以保證微針穿透的可靠性,磁場等外場調控的方式仍然需要額外的設備。同時,使用金屬彈簧、不可降解塑料或磁性顆粒等制作口服機器人勢必會引起患者的擔憂。因此,開發一種新型口服給藥裝置解決上述問題具有重要意義。
近期,清華大學醫學院張明君教授和機械系徐靜副教授團隊受到刺豚膨脹啟發,聯合開發了一種利用腸蠕動來驅動微針刺入腸壁的無痛可降解給藥機器人。在小型巴馬豬上進行的動物實驗表明,該微針機器人遞送胰島素的生物利用度達到23.6%,并且能夠順利通過小型豬的消化道,沒有引起腸梗阻。腸道組織學分析顯示微針刺入部分腸壁迅速恢復,炎癥反應有限。相關工作以“Pain-free oral delivery of biologic drugs using intestinal peristalsis–actuated microneedle robots”為題發表在ScienceAdvances期刊上。
在這項研究中,研究人員設計了一個三層結構的微針機器人。最內層為高粘度羧甲基纖維素鈉(SCMC)合成的超吸水性水凝膠顆粒,中間是聚乙烯醇(PVA)和丙烯酰胺(AAm)混合交聯形成的可拉伸薄膜。該薄膜一方面包裹內部的水凝膠顆粒,另一方面作為承載最外側載藥微針的基底。載藥微針是由聚乙二醇二丙烯酸酯(PEGDA)和聚乙二醇(PEG)混合交聯制成的雙層倒刺結構,上層倒刺中載有生物藥物。該微針機器人可以被裝入00號醫用腸溶膠囊中,口服之后可以順利通過胃中的強酸性環境。到達小腸后,腸溶膠囊融化,微針機器人開始吸水膨脹,同時在腸道蠕動的擠壓下將微針刺入腸壁。腸道舒張時,微針載藥的倒刺斷裂留在腸壁中,藥物持續溶出并且微針逐漸降解,而微針機器人的主體則隨著腸道蠕動不斷被擠壓破裂,并逐漸被排出體外(圖1)。
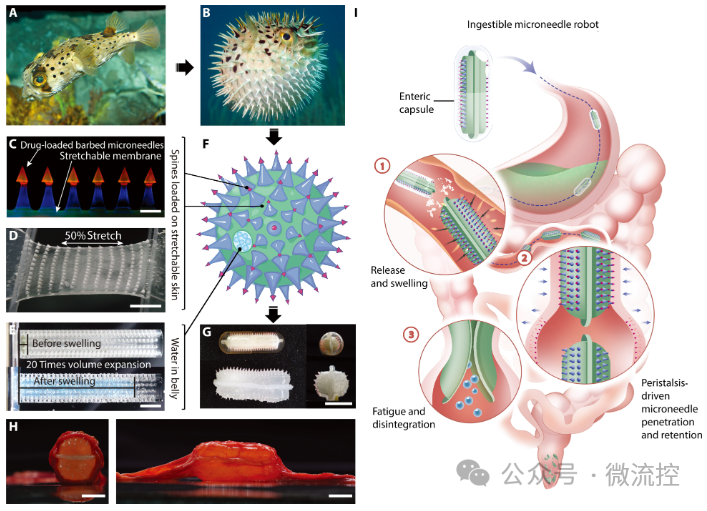
圖1腸蠕動驅動的刺豚啟發的用于口服遞送生物藥物的微針機器人
為了設計機器人的尺寸以保證微針在受到小腸擠壓時能夠刺入腸壁,研究人員在巴馬迷你豬上進行了腸道測壓和微針穿透評估。通過膠囊形測壓傳感器測量了不同尺寸機器人受到的腸蠕動壓力,并且通過與微針刺入小腸組織所需的力進行對比確定微針機器人的最小尺寸。再通過對微針機器人膨脹過程進行力學分析,設計微針機器人膨脹前的尺寸、可拉伸膜的彈性模量和水凝膠顆粒的填充率。使其既能放入腸溶膠囊,又能在膨脹后達到足夠的尺寸以產生足夠的蠕動壓力,同時保持足夠的硬度以支撐載藥微針刺入腸壁(圖2)。并且,研究人員將載藥微針設計成雙層倒刺結構,可以保證腸道舒張時載藥層可以斷裂在腸壁中,實現持續給藥(圖3)。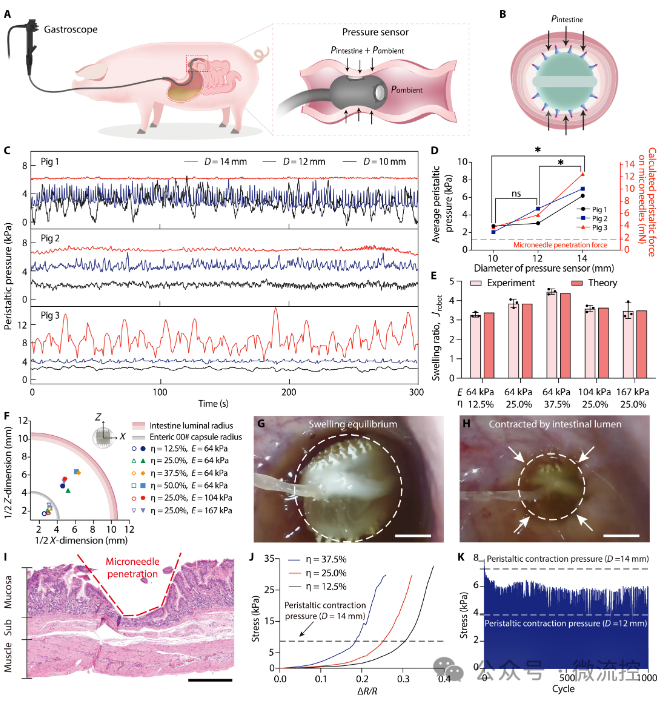
圖2 腸道測壓及微針穿刺實驗
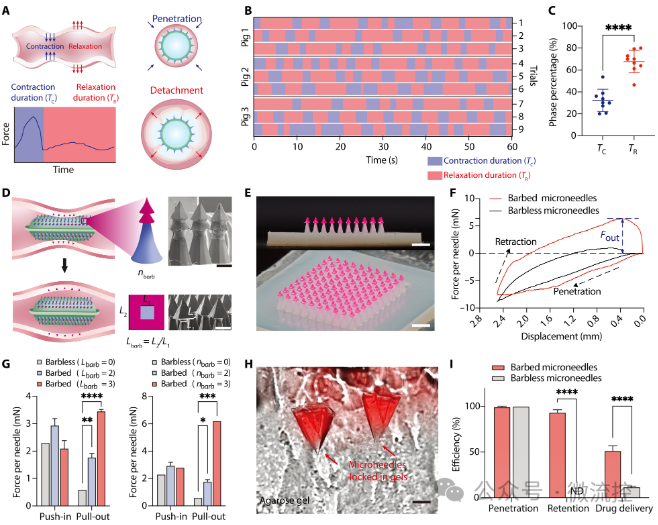
圖3 倒刺微針設計及實驗
最后,在巴馬小型豬上進行的實驗表明,使用本研究提出的倒刺微針機器人遞送胰島素可以實現23.6%的生物利用度,是直接口服胰島素的37.7倍。同時,與無倒刺微針機器人的遞送效果的對比也說明了倒刺結構的貢獻。并且,連續一周的X光拍攝顯示,遞送到小型豬食道的五個含有硫酸鋇的膠囊都順利通過了豬的消化道,并沒有導致豬出現腸梗阻和飲食習慣改變等明顯異常。以上實驗驗證了微針機器人作為生物藥物口服給藥平臺的有效性和安全性(圖4)。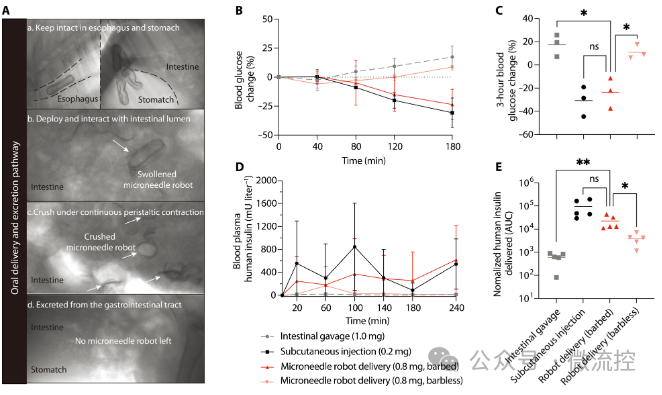
圖4 微針機器人的有效性和安全性驗證
綜上所述,本研究所提出的腸蠕動驅動的微針機器人為生物藥物的口服遞送提供了一個有前景的平臺,有可能在多個領域提高治療的舒適度。不過,由于不同人的腸蠕動頻率和強度有較大差異,未來的臨床研究可能需要考慮如何使其在更大的個體差異范圍內發揮作用。
清華大學醫學院張明君教授和機械系徐靜副教授為該論文的共同通訊作者,醫學院博士研究生高喜澤和機械系博士研究生李家聰為共同第一作者。本研究受到國家自然科學基金等項目的資助。
論文鏈接:
https://www.science.org/doi/10.1126/sciadv.adj7067
審核編輯:劉清
-
機器人
+關注
關注
210文章
28205瀏覽量
206532
原文標題:利用腸蠕動驅動的微針機器人,實現生物藥物的無痛口服遞送
文章出處:【微信號:Micro-Fluidics,微信公眾號:微流控】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于漩渦湍流輔助的微流控平臺,可實現類精子結構的微型機器人一步成型



開源項目!用ESP32做一個可愛的無用機器人
柔性機器人與剛性機器人區別與聯系


生醫應用的磁控膠囊機器人,實現多模態響應與多功能集成

用于水質和病毒監測的電驅動軟體機器人開發


子母式微納米機器人系統,用于顱內跨尺度靶向給藥

LabVIEW的六軸工業機器人運動控制系統
用全志R128復刻自平衡賽車機器人,還實現了三種不同的操控方式

基于微針的生物醫學系統的設計、制造和應用研究進展





 工商網監
工商網監
評論