 開關電源常用控制模式詳解
開關電源常用控制模式詳解
開關變換器控制器(芯片)是DC-DC變換器的核心,可分為PWM控制芯片和PFM控制芯片兩大類。其中PWM控制芯片的主要功能是產生頻率固定、脈沖寬度隨變換器輸入及輸出電壓變化的脈沖信號來控制變換器內開關管的導通時間,從而使DC-DC變換器輸出電壓保持穩定;而PFM控制芯片的主要功能是產生低電平時間或高電平時間固定,但開關頻率隨變換器輸入及輸出電壓變化的脈沖信號來控制開關管的導通時間,從而使DC-DC變換器輸出電壓保持穩定。一個是定頻,一個是變頻,變和不變的控制邏輯;
根據采樣對象的不同,可將PWM控制器分為電壓型和電流型兩大類。為簡化不同拓撲變換器的外圍電路,眾多半導體生產廠家為不同拓撲變換器設計了相應的PWM控制芯片或PFM控制芯片,其中傳統硬開關反激、正激變換器可共用同一類PWM控制芯片,如UC384X系列芯片、FAN67XX系列以及On-Bright公司的OB2262、OB2263、OB2273等;傳統硬開關半橋、全橋變換器也可以共用同一類PWM控制芯片,如TL494及其兼容芯片KA7500、SG3525芯片等;而FAN7930、L6562、MC33262、OB6563等PFM控制芯片又專為APFC變換器設計;QR反激變換器有專用的QR控制芯片,如飛兆的FAN6300系列(包括FAN6300A、FAN6300H),安森美的NCP1207、NCP1380系列,昂保的OB2201、OB2202、OB2203等;半橋諧振LLC變換器也有專用的PFM控制芯片,如ST公司的L6599與L6599A、飛兆半導體的FAN7621、FAN7631等,已并入安森美。
1、VM電壓PWM控制器
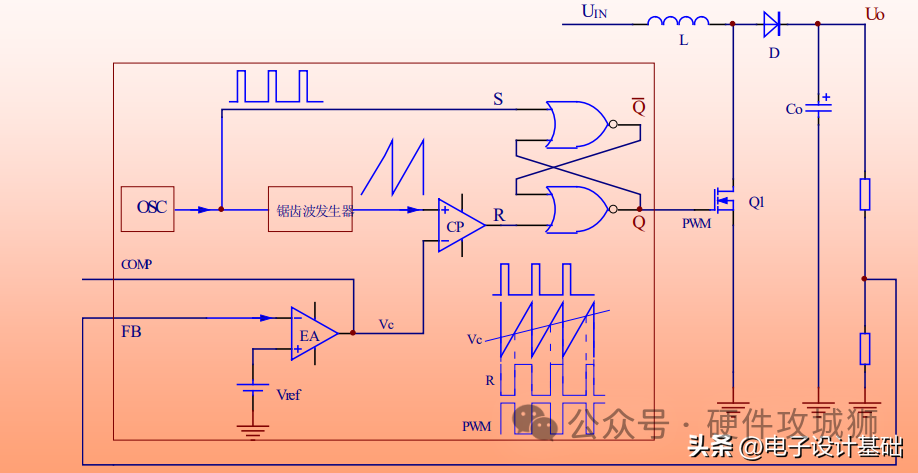
圖1 PWM VM 電源boost控制器 框圖
工作原理:占空比發波大小由輸出電壓Uo進行采樣,控制PWM占空比,使得輸出電壓電壓穩定;在VM PWM控制器中,振蕩器的開關頻率是固定的,鋸齒波的輸出信號斜率也是固定的,PWM調節器實際是一個電壓比較器,誤差放大器EA輸出信號Uc為受輸出電壓控制的一個模擬信號,當輸入電壓抬高,VC是減小的,反之是增加的,振蕩器clk輸出高電平,RS觸發器Q置高,相當于時鐘上升沿發波,什么時候停止發波低電平呢?受控于R端,R端變低,停止發波,再到下一個時鐘上升沿再次發波;那占空比高電平始于CLK,終于R變低,整個周期clk的周期固定,占空比變低的時間為VC和斜波比較,當斜波大于VC時,停止發波;詳見圖1中間波形
優點:電壓型控制器不需要斜率補償電路,只有一個閉環反饋回路,
缺點:但反饋補償電路設計相對復雜,最大缺點是對輸入電壓UIN 變化反應速度慢。例如,當輸入電壓UIN 發生階躍跳變時,由于變換器輸出端接有大容量濾波電容,輸出電壓UO 可能會出現明顯的波動,經歷一段時間后輸出電壓UO 才逐漸趨于穩定。因此,在電壓型 PWM 控制器中可能還需要增加前饋電路,強迫鋸齒波電壓斜率隨輸入電壓UIN 升高而增加,相當于減小占空比,斜率增加了,需要很短時間就復位了,起到了前饋作用;如TI的控制器 UCC3750 buck 控制器 VM控制具有前饋作用;提前補償,有前饋的補償,可以使得占空比和輸入電壓沒關系,這樣補償也變得容易。
2、電流型控制器CM
電流型控制的開關電源技術與設計為改善開關控制器動態響應速度,1972年F.C.Shiwarz提出了電流型(Current Mode Control)控制器模型,它實際上是電流、電壓雙閉環負反饋控制系統,借助電壓閉環負反饋穩定輸出電壓 ,以便獲得良好的負載調整率;借助主開關電感或開關管電流閉環負反饋形成的前饋特性改善輸入電壓突變的響應速度,以便獲得良好的線電壓調整率。電流型控制器包括了峰值電流控制、平均電流控制、電流滯環控制三種方式。
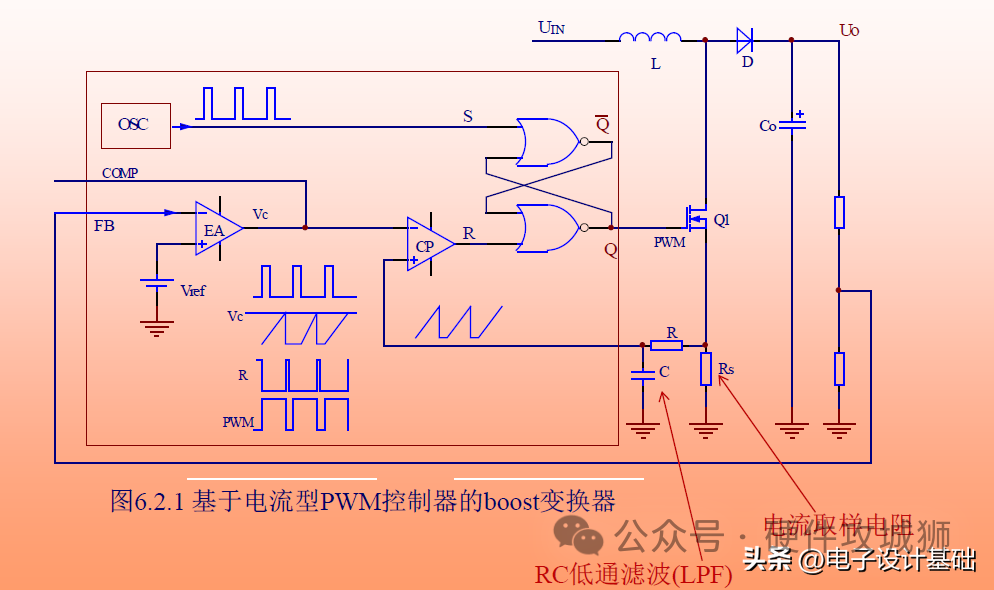
圖2 CM PWM BOOST 框圖
工作原理:雙閉環,外環電壓環,內環電流環;通過輸出電壓的取樣,控制PWM信號的占空比使得輸出電壓穩定,通過對電感電流進行取樣,使得能夠即時感知輸入電壓的變化,電流型PWM控制器中,振蕩頻率也是不變的,誤差放大器的EA輸出UC幅度決定著輸出電壓,在開關管Q1截止器件,取樣信號為0,CP比較器的同相輸入段Wie0,反相輸入段Uc大于0,所以R端為0,觸發器為高有效,當振蕩器 OSC 高電平時觸發S=1,Q值=1,打開MOS Q1,相當于時鐘開門,關門是RS檢測電阻上的電流斜波幅值決定,當大于UC時,觸發高電平R=1,Q=0,關閉Q1,ton結束,進入toff,之道下一個時鐘上升沿到來,開啟下一個ton時刻,周而復始,RS觸發器有兩個功能(觸發和保持功能。S=1觸發開啟,R=1 觸發復位,其他時刻都是保持);
優點:由于電感電流 IL=uin/L*T 檢測電阻上電壓波形US=IL*RS=uin/L*RS*t,可以看見斜波斜率受輸入電壓影響,成正比,本身就具備了電壓前饋特性,對輸入電壓Uin的突變相應速度快,引其實恒流源控制,相對于VM控制,其補償容易些,一般需要2型補償或者基本的1型補償就可穩定;如下圖 3在輸出電壓升高和降低,輸入電壓降低時的占空比調整過程,可以看到輸入電壓降低時,直接改變占空比維持電感電流的穩定,所以其相應相對于VM調整更快。比較適合寬壓輸入的拓撲。
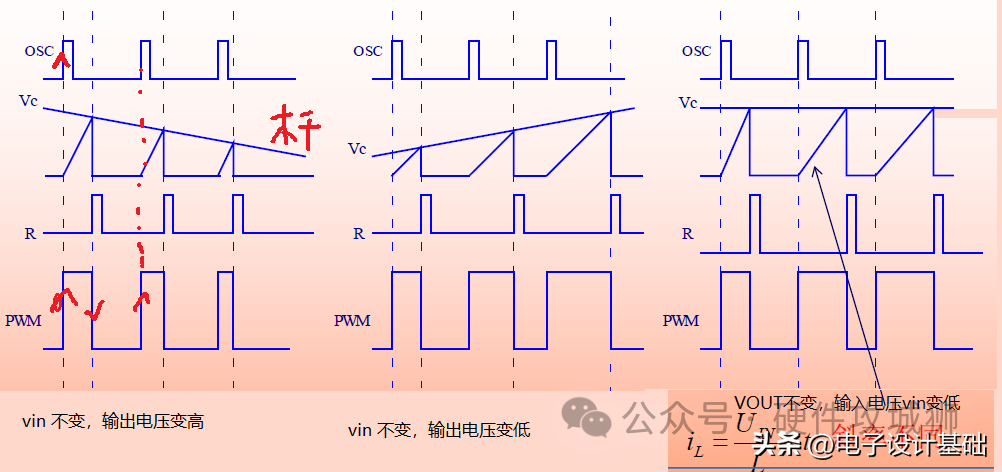
圖3 電流型PWM控制器的調整波形
缺點是:CM在Q1開通時,由于變壓器寄生電容通過MOS瞬間充電,引其前沿電壓尖峰,一般需要RC濾波躲過,或者控制器里面有濾波或者延時計數等躲過,另外其占空比如大于0.5 CCM,有次諧波振蕩,需要斜波補償;對于DCM模式,不需要;
3、峰值電流型控制器次諧振現象與斜波補償電路
工作在CCM模式下,占空比D>0.5出現次諧振現象;具體的表現為系統受到干擾,輸入電壓突變又恢復,負載突變又恢復等,相鄰的兩個開關周期,會因為電感電流的偏移,使得TON導通時間出現長短交替,使得系統進入失控狀態,尤其是測試上出現大小波,出現比正常的開關頻率更低的振蕩,就是所謂的次諧波振蕩現象。
具體的可用圖4形象地解釋。其中粗實線表示正常狀態下的斜坡電壓,虛線表示受干擾后的斜坡電壓。
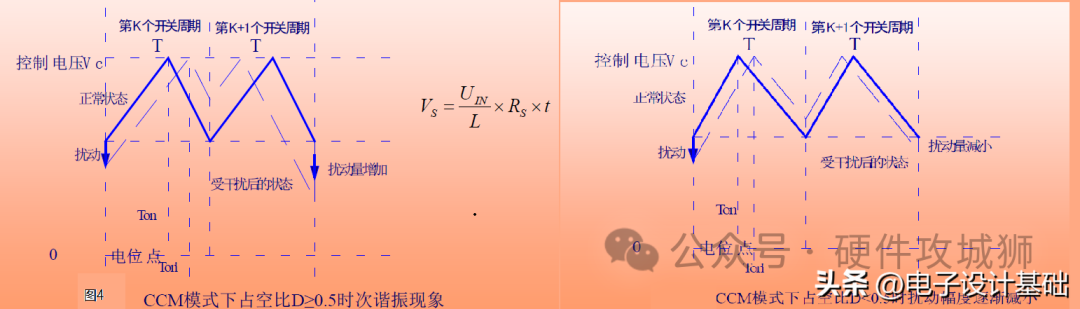
圖 4 CCM D>0.5 次諧波現象 D<0.5次擾動減小
圖中,BOOST電感電流IL經過檢測電阻采樣,作為電流斜波信號,導通斜波US=IL*RS=uin/L*RS*t隨著導通時間線性增加,變換器受到擾動后的第K個周期內,電感電流從最小值從IL’線性增加,如負載突然減小又快速恢復的擾動引起,或者輸入電壓有突變抬高后又恢復等,都會引起IL’降低,而控制器的ton 在第K個周期增加到Ton',按理說應該經過數個周期后恢復到正常值,但是這個小小的擾動使得占空比大于0.5時,經過K+1,K+N, TOn時間縮短,以此往復,導致系統進入不穩定狀態,形成次諧波震蕩,而在DCM和CRM模式,因為每個周期IL均從0開始,所以不會出現此問題,僅僅擾動影響當前的開關周期占空比增大或者縮小;而當占空比小于0.5時,高中的幾何原理很容易證明占空比增量逐漸縮小,擾動變小;
為此,在由峰值電流型PWM控制器構成的DC-DC變換器中,為避免占空比D>0.5時,CCM模式下峰值電流型PWM控制器出現次諧振現象,可使比較器的控制電壓UC呈現向下的斜坡,或者在電流檢測同相端增加一個諧波,(在電感電流對應的斜坡電壓上疊加一個同頻的斜率補償電壓,使等效的斜坡電壓斜率增加。)目的是減小占空比,這塊實際是引入一個諧波搞定占空比擾動;
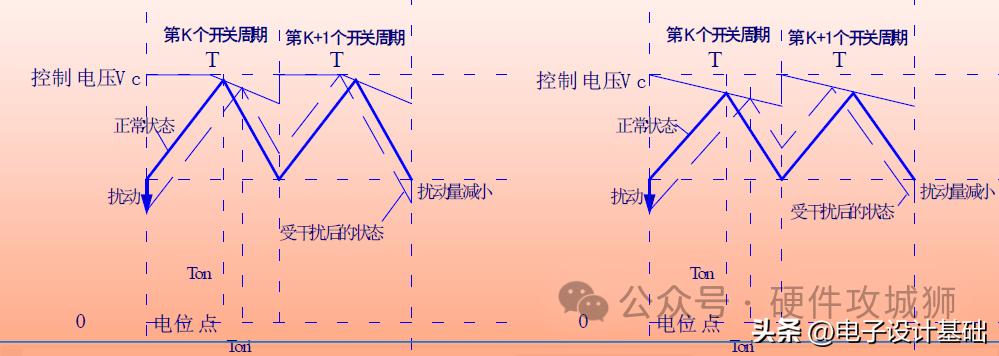
圖5 電流斜波補償
(1)如果變換器工作在CCM模式,將占空比限制在0.5以內,可避免產生次諧振現象;
(2)在最小輸入電壓下,占空比D可能大于0.5時,選擇DCM或BCM模式,也不存在次諧振現象;
(3) 在最小輸入電壓下,占空比D可能大于0.5,且變換器又必須工作在CCM模式時,則只能借助斜率補償電路,方能避免出現次諧振現象,確保變換器穩定工作。
盡快峰值電流型控制策略在特定的條件下存在斜波補償電路,但是其優點非常明顯,消除了電感的雙極點,使得系統的LC傳遞函數降為1階,環路穩定補償更容易,另外線調整率提高,對輸入電壓的相應速度快,很容易實現CBC逐周期限流保護,簡化了過流保護電路設計,當多模塊并聯時,每個模塊的基準均來自輸入電壓基準VC,很容易實現并聯均流,目前絕大多數電流型反激,正激變換器Pwm控制芯片均采用這種控制方式。
4、平均電流型控制
此控制模式是1987年由B.L.WILKINSON 提出的平均電流型控制,該控制方案在PFC電路中得到了廣泛應用。如下圖6
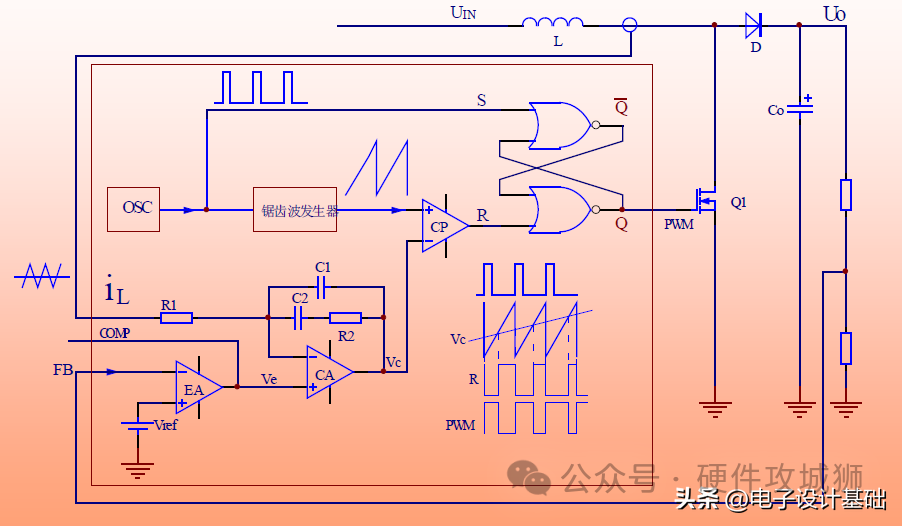
圖6 平均電流控制 BOOST 框圖
其工作原理:UO經過輸入采樣通過FB送誤差放大器的反相輸入端,與參考電壓誤差經放大補償之后的信號VE作為內環電流環的基準信號,這塊與前面的VM,峰值CM控制相同的外環,VE作為內環平均電流的基準,峰值電流 CA為比較器,此平均電流為電流誤差放大器,放大電感電流IL與UE的差值產生VC信號 VC信號再與鋸齒波切割產生PWM,可見平均電流控制信號也是電壓電流的雙閉環控制系統;
優點:這種平均電流控制抗干擾能力強,穩定性高,缺點:電感平均電流采樣電路復雜,檢測元件體積大,功耗大;
5、電流滯環型控制
電流滯環型控制也通過采樣電感電流,并與給定的電感上限電流、下限電流比較。當變換器電感電流大于Ilmax時,PWM輸出低電平,使開關管斷開,電感電流下降,當下降到低于Ilmin時,使得開關管導通;以此往復,由于電感電流的上升和下降斜率與負載輕重,與輸入電壓相關,因此電流滯環型控制的開關頻率是不固定的,會隨著負載輕重和輸入電壓的變化而變化,屬于PFM的調制范疇
當然以上是經典的控制模式,不局限于這幾種控制,還有電荷控制,單周期控制,數字PID控制等。可根據控制器的設計模式進行分析。
本文講解了 PWM VM和CM(峰值,均值), PFM (COT控制模式)經典控制方式。是目前常用工作方式,應用廣泛。
審核編輯:湯梓紅
-
開關電源
+關注
關注
6448文章
8289瀏覽量
480672 -
控制器
+關注
關注
112文章
16203瀏覽量
177417 -
峰值電流
+關注
關注
0文章
58瀏覽量
11969 -
控制模式
+關注
關注
0文章
25瀏覽量
8339
原文標題:開關電源常用控制模式(峰值電流、平均電流、電流滯環)
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論