 PLC編程案例之控制機械手實現簡單搬運流程
PLC編程案例之控制機械手實現簡單搬運流程
很多人希望多分享一些PLC具體應用和維護的案例,滿足大家的要求。今天咱們來談一談如何利用PLC來實現簡單的搬運動作,讓機械為人服務!
這個例子應用到了順序控制的指令,實際操作起來真的是非常方便,程序循環控制也很流暢!
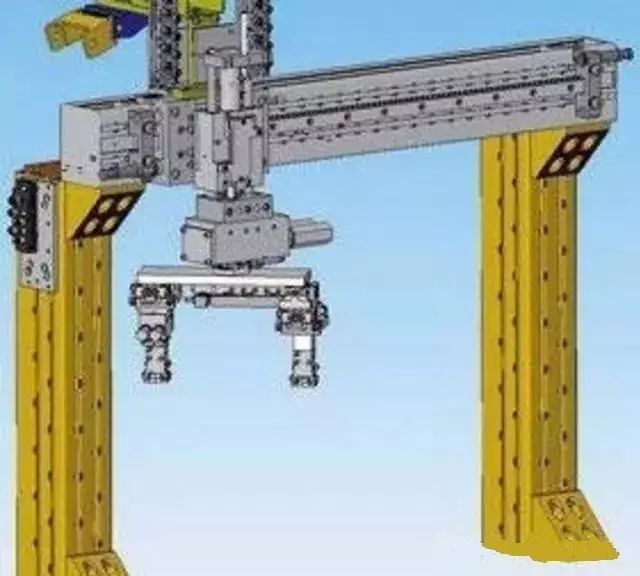
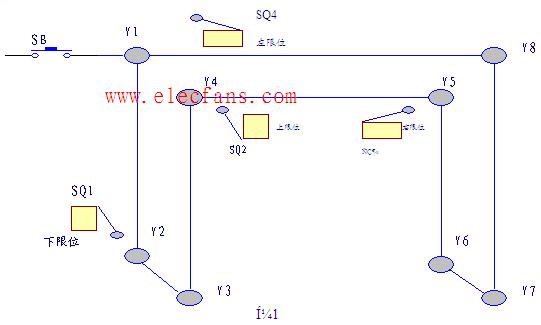
簡易機械手結構圖如圖所示
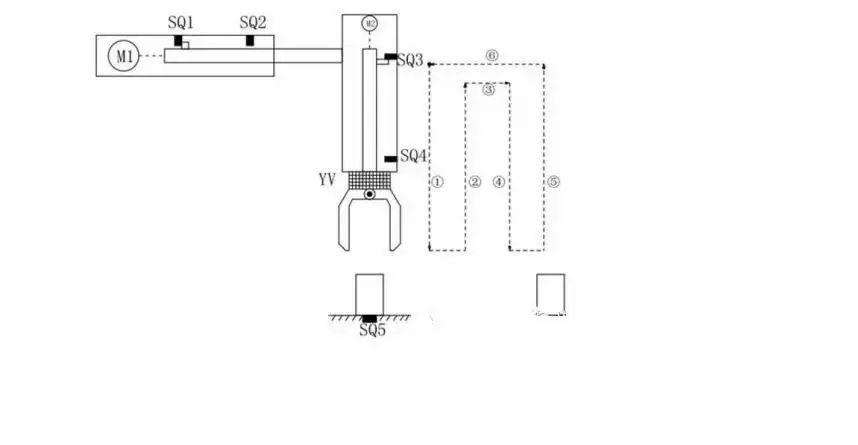
M1為控制機械手左右移動的電動機
M2為控制機械手上下升降的電動機
YV線圈用來控制機械手夾緊防松
SQ1為左到位檢測開關
SQ2為右到位檢測開關
SQ3為上到位檢測開關
SQ4為下到位檢測開關
SQ5為工件檢測開關
簡易機械手的控制要求如下:機械手要將工件從工位A移到工位B 處;
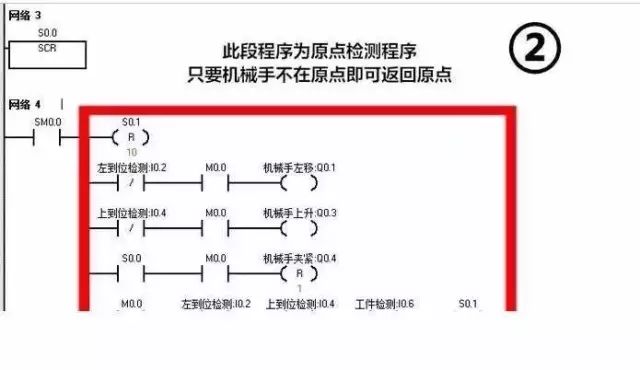
機械手的初始狀態(原點條件)是機械手應停在工位A的上方,SQ1、SQ3均閉合;
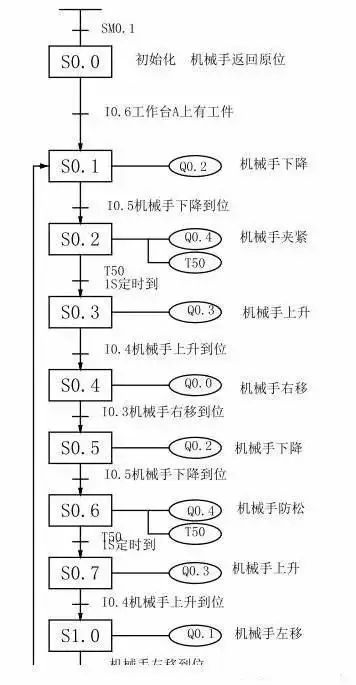
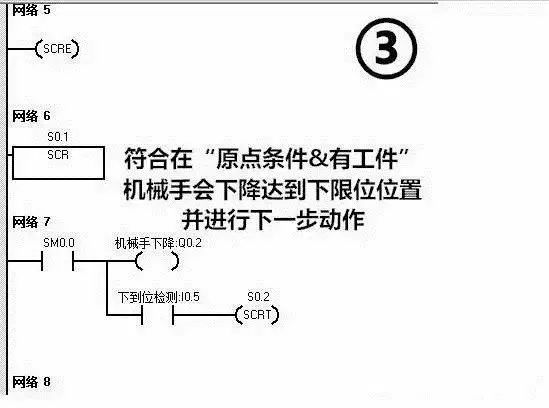
若原點條件滿足且SQ5閉合(工件A處有工件),按下啟動按鈕,機械手按“原點→下降→夾緊→上升→右移→下降→防松→上升→左移→原點”的步驟工作。
動作圖編程前理順動作如何轉移:
定義符號表:

硬件的接線圖:
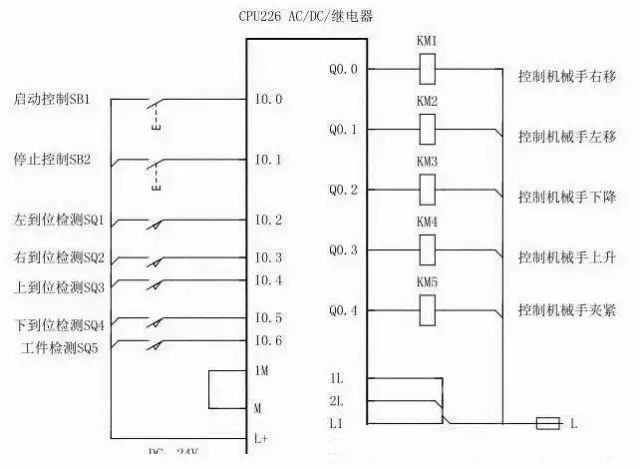
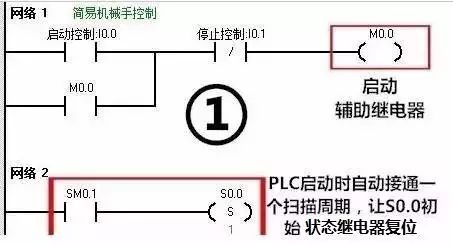
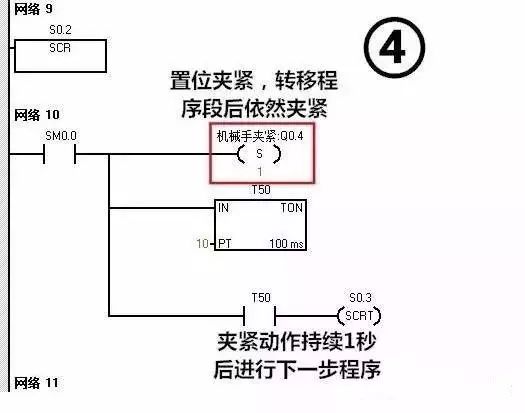
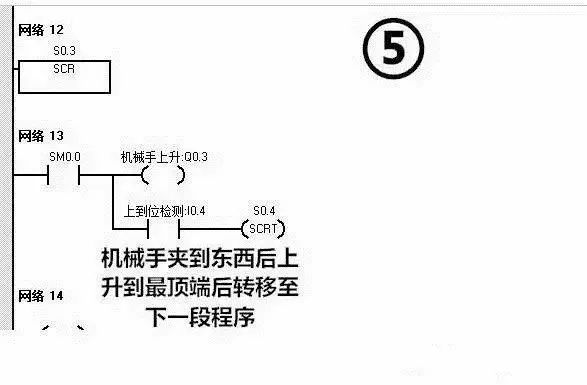
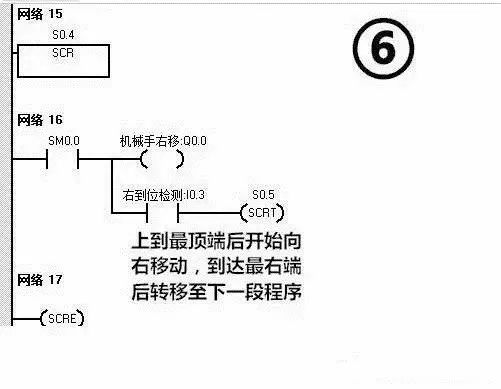
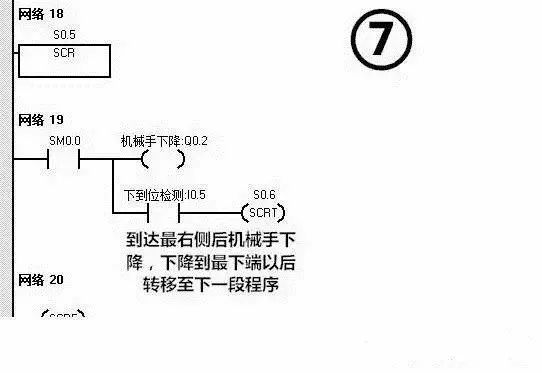
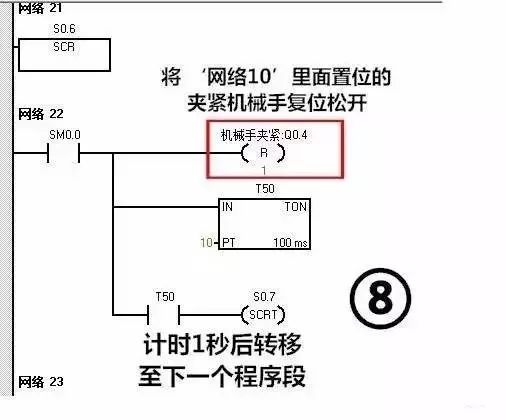
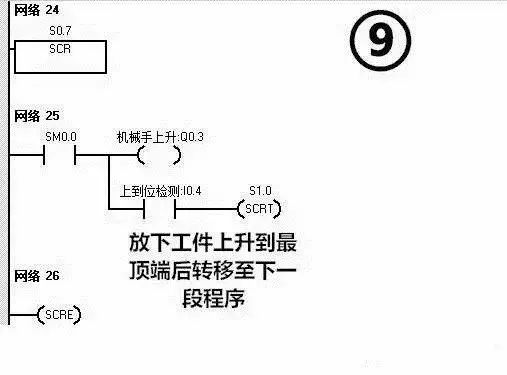
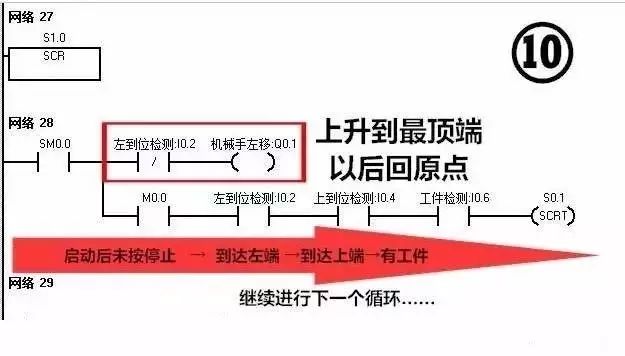
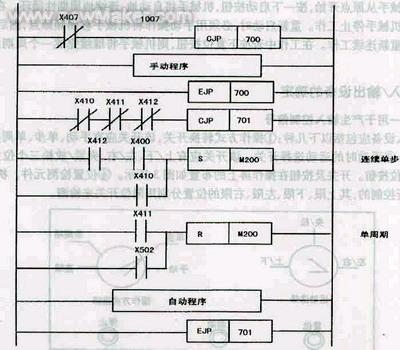
滿足所有動作的程序如下:

這么多梯形圖看著真是頭暈目眩,接下來我們一段一段分析分析這個機械手是如何工作的,其實這個圖沒有那么多的并行分支,所以轉移起來邏輯非常簡單!
審核編輯:劉清
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
電動機
+關注
關注
74文章
4089瀏覽量
96001 -
PLC編程
+關注
關注
46文章
246瀏覽量
37373
原文標題:PLC編程案例之控制機械手實現簡單搬運
文章出處:【微信號:中泰PLC自動化教學,微信公眾號:中泰PLC自動化教學】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
機械手 OEM 的應用
采用電動機作為驅動源,具有運動速度快、精度高、噪聲低等優點。它可以通過編程實現復雜的運動控制,適用于一些對運動控制要求較高的應用場景,如電子制造、科研教育等。
液壓
發表于 09-18 10:31
轉:分享基于ATmega16的搬運機械手的設計與控制方案
項目介紹: 本項目基于液壓控制的搬運機械手,其控制結構采用ATmega16 8位單片機,利用Proteus與Atmel Studio6.0軟件進行控
發表于 08-04 13:43
使用桁架式機械手有哪些優勢?
`力泰科技資訊:桁架式自動上下料機械手能夠實現自動控制的、可重復編程的、多功能的、多自由度的、運動自由度間成空間直角關系、多用途的操作機。它能夠搬運
發表于 11-25 15:24
基于 CAN 總線的機械手控制系統The Control S
基于現場總線的開放結構機械手控制系統是目前機械手控制的發展方向。文章通過對物料搬運機械手裝置及其
發表于 06-03 09:10
?28次下載
基于PLC控制的注塑機專用機械手
基于PLC控制的注塑機專用機械手
目前,市場上流行的注塑機專用機械手就控制系統而言都是使用專用的微處理機加接口組成的最小
發表于 06-16 15:24
?1994次閱讀
PLC在機械手控制系統上的應用
PLC在機械手控制系統上的應用
機械手在工業生產中得到廣泛的應用,傳統工藝中采用繼電器控制時,需要的繼電器多,接線復雜,因 此
發表于 06-17 13:35
?1w次閱讀

基于PLC的機械手混合驅動控制
通過對物料搬運機械手裝置結構與功能的介紹,提出了一種電氣伺服和氣動伺服相結合的混合驅動機械手結構類型,重點分析了基于45, 的機械手控制系統
發表于 08-15 17:49
?101次下載

PLC在機械手控制系統中的具體應用
隨著工業自動化技術的飛速發展,機械手作為現代制造業中不可或缺的重要設備,其智能化、自動化水平不斷提高。在機械手控制系統中,PLC(可編程邏輯





 工商網監
工商網監
評論