") 鑒源實驗室|自動駕駛仿真測試技術(shù)分析
鑒源實驗室|自動駕駛仿真測試技術(shù)分析
01
引言
隨著科技的不斷發(fā)展,自動駕駛技術(shù)逐漸成為汽車行業(yè)的熱門話題。然而,要將自動駕駛車輛投放到真實道路上之前,必須進(jìn)行廣泛的測試,以確保其在各種情況下都能安全可靠地運行。自動駕駛車輛的測試是一個復(fù)雜而昂貴的過程。在真實道路上進(jìn)行測試存在許多挑戰(zhàn),包括安全性、成本和時間。為了克服這些問題,仿真測試技術(shù)不失為一種有效的解決方法。
自動駕駛仿真測試是通過虛擬環(huán)境來模擬各種駕駛場景,以評估自動駕駛系統(tǒng)的性能。自動駕駛汽車的仿真測試的核心技術(shù)點主要可以分為虛擬場景仿真、感知系統(tǒng)仿真、車輛動力學(xué)仿真以及云加速仿真[1]。
02
虛擬場景仿真
自動駕駛汽車的仿真測試,首先需要模擬構(gòu)建出一個逼真的虛擬場景,而場景的構(gòu)建可以分為靜態(tài)場景構(gòu)建和動態(tài)場景構(gòu)建兩個層面[2]。
2.1靜態(tài)場景構(gòu)建
靜態(tài)場景主要用于模擬出與車輛行駛相關(guān)的靜態(tài)元素,其中包含的靜態(tài)元素有道路、建筑、交通標(biāo)志等。構(gòu)建靜態(tài)場景的方法可以采用基于高精度地圖及三維重建技術(shù)[3]。基于高精度地圖及三維重建技術(shù)來構(gòu)建場景,首先需要采集點云、全景圖、測繪矢量等非結(jié)構(gòu)化的測繪數(shù)據(jù),并將測繪數(shù)據(jù)結(jié)構(gòu)化,構(gòu)建厘米級的高精度地圖,其中包含路面、道路標(biāo)線、交通標(biāo)識等信息,之后以此為基礎(chǔ),使用三維建模軟件建立基礎(chǔ)設(shè)施與周邊環(huán)境的可視化數(shù)字模型。

圖1 靜態(tài)場景(來源于Carsim的demo)
2.2 動態(tài)場景構(gòu)建
動態(tài)場景包括天氣變化(雨、雪、霧等天氣狀況)、時間變化(不同時間和季節(jié)的光照條件等)、交通流(交通參與者的行為,例如機(jī)動車行為、非機(jī)動車行為、行人行為)等動態(tài)要素。動態(tài)場景的構(gòu)建是在靜態(tài)場景的基礎(chǔ)上,還原出場景中的動態(tài)元素,并且使得這些元素的動作及其產(chǎn)生的影響嚴(yán)格遵循現(xiàn)實世界的物理規(guī)律以及行為邏輯。動態(tài)場景的構(gòu)建,可以借助物理引擎、AI Agent等來實現(xiàn)。
物理引擎可以模擬出物體在真實世界中的物理規(guī)律,賦予真實的物理屬性的方式來計算運動和碰撞行為等。物理引擎可以模擬剛體(硬物體)和軟體(如布料、液體等)的運動和變形,從而更全面地模擬多樣化的物體行為。
AI Agent (人工智能體)是一種能夠感知環(huán)境、進(jìn)行決策和執(zhí)行動作的智能實體。在虛擬場景中,AI Agent 可以做出決策,選擇合適的行為,并規(guī)劃最優(yōu)路徑以實現(xiàn)目標(biāo);可以模擬對環(huán)境的感知能力,例如通過傳感器獲取周圍物體的信息,以便做出合適的決策;可以模擬智能體之間的協(xié)作行為,例如避讓、跟隨、協(xié)同工作等。此外,Agent AI還具備學(xué)習(xí)能力,能夠根據(jù)經(jīng)驗調(diào)整其行為。
03
感知系統(tǒng)仿真
自動駕駛車輛依賴于各種傳感器,如攝像頭、雷達(dá)和激光雷達(dá)等。仿真測試技術(shù)需要能夠準(zhǔn)確模擬這些傳感器的輸入,以確保自動駕駛系統(tǒng)在虛擬環(huán)境中能夠正確地感知和理解周圍的環(huán)境。傳感器仿真指的是數(shù)學(xué)模型和計算機(jī)算法來模擬和重現(xiàn)真實世界中傳感器所能感知的物理現(xiàn)象的過程[4]。它可以在虛擬環(huán)境中重現(xiàn)傳感器的工作情況,從而在沒有實際硬件的情況下評估和測試傳感器的性能。
3.1 攝像頭仿真
攝像頭仿真的一般方法是基于環(huán)境物體的幾何空間信息構(gòu)建對象的三維模型。根據(jù)物體的真實材質(zhì)與紋理,并通過計算機(jī)圖形學(xué)對三維模型添加顏色與光學(xué)屬性等,來模擬實現(xiàn)圖像合成。攝像頭仿真通過坐標(biāo)系轉(zhuǎn)換的方法,將三維空間中的點通過透視關(guān)系變換為圖像上的點。
3.2 毫米波雷達(dá)仿真
雷達(dá)(無線電探測與測距)仿真是一種模擬雷達(dá)系統(tǒng)操作的過程,它可以重現(xiàn)雷達(dá)波的傳播、目標(biāo)的檢測和回波的分析。雷達(dá)仿真一般會根據(jù)配置的視場角和分辨率信息,向不同方向發(fā)射一系列虛擬連續(xù)調(diào)頻毫米波,并接收目標(biāo)的反射信號。不同車輛的雷達(dá)回波強(qiáng)度可使用微表面模型能量輻射計算方式,由車輛模型以及車輛朝向、材質(zhì)等計算。
3.3 激光雷達(dá)仿真
激光雷達(dá)(或LiDAR,Light Detection and Ranging)仿真則是模擬使用激光掃描來構(gòu)建物體或環(huán)境的三維圖像的過程。激光雷達(dá)傳感器仿真,需要準(zhǔn)確模擬出發(fā)射激光束并測量其反射,生成點云數(shù)據(jù)。生成模擬的激光雷達(dá)點云數(shù)據(jù),其中包含了周圍環(huán)境中的物體位置和形狀信息。
04
車輛動力學(xué)仿真
自動駕駛汽車在仿真測試中,需要借助車輛動力學(xué)模型來模擬車輛的橫向和縱向運動控制,還原出車輛在真實道路上各種物理條件下的行為[5]。復(fù)雜的車輛動力學(xué)模型,可以保證車輛有良好的仿真精度,使仿真車輛的行駛反應(yīng)更貼近真實行為。因此,車輛動力學(xué)仿真,可以逼真地模擬出車輛的運動、碰撞檢測和處理,以及不同路面條件對車輛行駛的影響等等。
車輛動力學(xué)模型包含了車體、懸架系統(tǒng)、轉(zhuǎn)向系統(tǒng)、制動系統(tǒng)、動力系統(tǒng)、傳動系統(tǒng)等多個部分的模型,通過將車輛動力學(xué)模型實例參數(shù)化之后,就可以實現(xiàn)對仿真車輛模型的轉(zhuǎn)向、加速、制動等行為的模擬和控制。
借助專業(yè)的車輛動力學(xué)仿真軟件可以模擬出高精度的車輛動力學(xué)模型,同時,一些強(qiáng)大的車輛動力學(xué)仿真軟件還可以提供車輛可視化和駕駛場景搭建功能。目前,專業(yè)的車輛動力學(xué)仿真軟件,有 CarSim、Prescan、CarMaker、VI-Grade、VeDYNA 和 PanoSim 等,仿真平臺可以接入這些成熟的車輛動力學(xué)模型,以獲得比較逼真的行駛控制仿真效果。

圖2 車輛動力學(xué)模型(來源于Carsim的demo)
05
云加速仿真
自動駕駛仿真測試系統(tǒng)在進(jìn)行仿真任務(wù)時需要訪問大量采集或者生成的數(shù)據(jù),并根據(jù)生成的數(shù)據(jù)利用 CPU 和 GPU 資源對數(shù)據(jù)進(jìn)行再處理并還原,或者對已經(jīng)結(jié)構(gòu)化的數(shù)據(jù)進(jìn)行 GPU 渲染再現(xiàn)。這些仿真任務(wù)都需要依賴強(qiáng)大的計算和存儲能力,而借助云加速仿真的技術(shù),可以高效執(zhí)行大規(guī)模的仿真任務(wù)。
云加速仿真是指利用云計算平臺的強(qiáng)大計算和存儲能力,通過將仿真任務(wù)遷移到云端來加速仿真過程。這種方法可以顯著提高仿真效率,減少仿真時間,同時降低了對本地硬件資源的依賴。同時,云加速仿真可以通過并行化和分布式計算來加速任務(wù)的執(zhí)行。云平臺提供了強(qiáng)大的計算資源,可以同時處理多個任務(wù)或者將一個大任務(wù)分解成多個子任務(wù)并行執(zhí)行,從而提高仿真效率。
06
小結(jié)
自動駕駛仿真測試技術(shù)在推動自動駕駛技術(shù)的發(fā)展中發(fā)揮著重要作用。通過在虛擬環(huán)境中模擬各種復(fù)雜情景,該技術(shù)降低了測試成本、提高了安全性,并加速了自動駕駛系統(tǒng)的迭代和創(chuàng)新。然而,仍然有一些挑戰(zhàn)需要克服,如提升虛擬場景的逼真度、提高傳感器模擬精度等。未來,隨著技術(shù)的不斷發(fā)展,自動駕駛仿真測試技術(shù)將繼續(xù)演進(jìn),為自動駕駛技術(shù)的商業(yè)化和普及做出更大的貢獻(xiàn)。
參考文獻(xiàn):
[1]中國電動汽車百人會.中國自動駕駛仿真藍(lán)皮書[R].(2020).
[2]朱冰,張培興,趙健,陳虹,徐志剛,趙祥模,鄧偉文.基于場景的自動駕駛汽車虛擬測試研究進(jìn)展[J].中國公路學(xué)報,2019,32(06):1-19.DOI:10.19721/j.cnki.1001-7372.2019.06.001.
[3]Huang W L,Wang K,Lv Y,et al.Autonomous vehicles testing methods review[C]//2016 IEEE 19th International Conference on Intelligent Transportation Systems(ITSC).IEEE,2016:163-168.
[4]Rosique F,Navarro P J,Fernández C,et al.A systematic review of perception system and simulators for autonomous vehicles research[J].Sensors,2019,19(3):648.
[5]Sch?ner H P.Simulation in development and testing of autonomous vehicles[C]//18.Internationales Stuttgarter Symposium:Automobil-und Motorentechnik.Springer Fachmedien Wiesbaden,2018:1083-1095.
審核編輯 黃宇
-
仿真
+關(guān)注
關(guān)注
50文章
4048瀏覽量
133431 -
測試技術(shù)
+關(guān)注
關(guān)注
0文章
113瀏覽量
21042 -
自動駕駛
+關(guān)注
關(guān)注
783文章
13694瀏覽量
166165
發(fā)布評論請先 登錄
相關(guān)推薦
蘋果瑞士建秘密實驗室 招聘10位博士開發(fā)自動駕駛
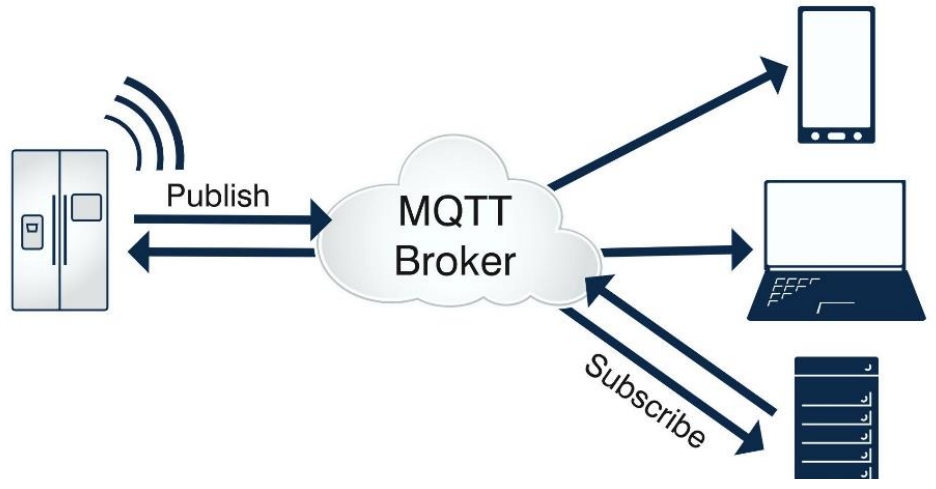
鑒源實驗室·基于MQTT協(xié)議的模糊測試研究
汽車自動駕駛技術(shù)
【話題】特斯拉首起自動駕駛致命車禍,自動駕駛的冬天來了?
自動駕駛的到來
硅谷組建團(tuán)隊、L3產(chǎn)品落地,想法多多的騰訊自動駕駛
如何讓自動駕駛更加安全?
中標(biāo)自動駕駛教育大項目,獲海外批量訂單 | PIX秘笈分享 精選資料分享
自動駕駛技術(shù)的實現(xiàn)
實驗室lims系統(tǒng)解決方案
廣東金鑒實驗室科技有限公司介紹
是德科技推出雷達(dá)場景仿真器解決方案,加快全自動駕駛技術(shù)發(fā)展腳步

NVIDIA 自動駕駛實驗室:如何通過 AI 分割模型增強(qiáng)自動駕駛安全性

上海人工智能實驗室發(fā)布自動駕駛視頻生成模型GenAD
鑒源實驗室·ISO 26262中測試用例的得出方法-等價類的生成和分析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論