") 基于雙邊介電彈性體致動器的肌肉啟發(fā)軟體機器人設(shè)計
基于雙邊介電彈性體致動器的肌肉啟發(fā)軟體機器人設(shè)計
相較于依賴準確電機或機械設(shè)備進行精確多維控制的傳統(tǒng)機器人,新型柔性機器人只能通過柔性致動器的材料變形以簡單的驅(qū)動方法進行控制。然而,柔性材料的非線性變形很難預(yù)測,這使得柔性機器人難以處理復(fù)雜的操作要求。
受到人體肌肉群的啟發(fā),電科技大學(xué)的于軍勝教授團隊設(shè)計了一種具有雙側(cè)變形功能的柔性致動器,并在此基礎(chǔ)上開發(fā)了一種具有可調(diào)致動組合的齒輪狀3D柔性機器人,具備可調(diào)節(jié)的致動組合。隨后,又受口腔輪匝肌啟發(fā),設(shè)計了一種類似嘴巴的柔性機器人,該機器人可以咬住并抓取其體重5.3倍的物體。這種單一致動器的雙向功能和多個致動器之間的各種組合模式使柔性機器人展現(xiàn)出多樣的功能和靈活性,為設(shè)計高度可控的三維柔性機器人提供了一種新的思路。目前,該工作以“Muscle-inspired soft robots based on bilateral dielectric elastomer actuators”發(fā)表在《microsystems & nanoengineering》。
圖文導(dǎo)讀:
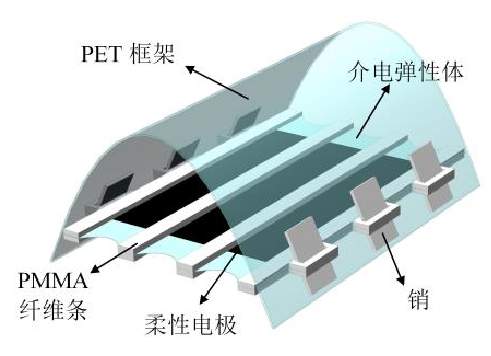
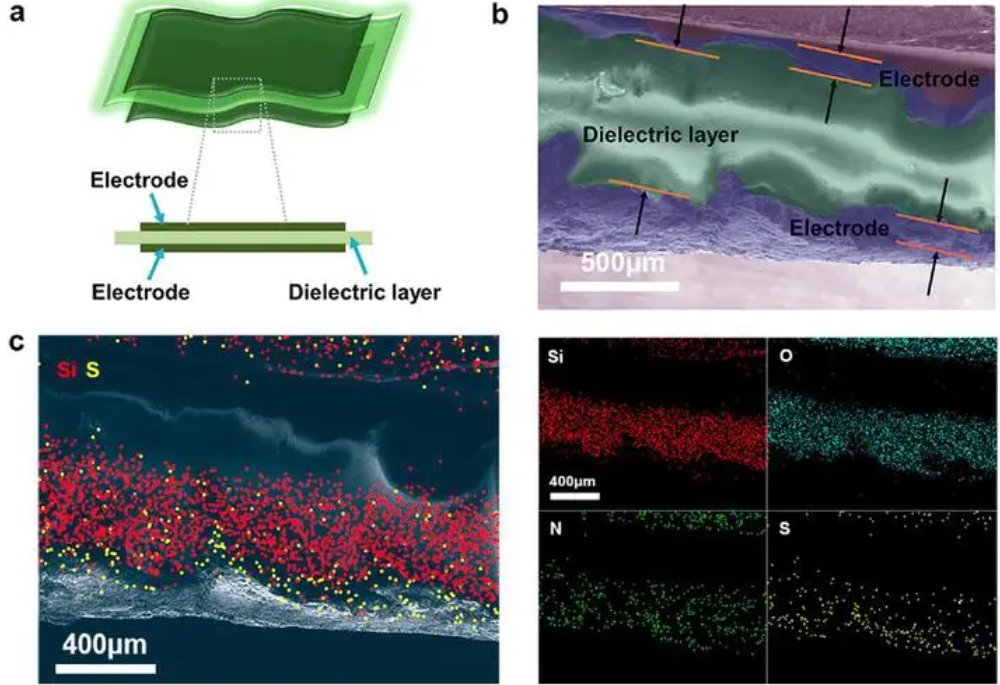
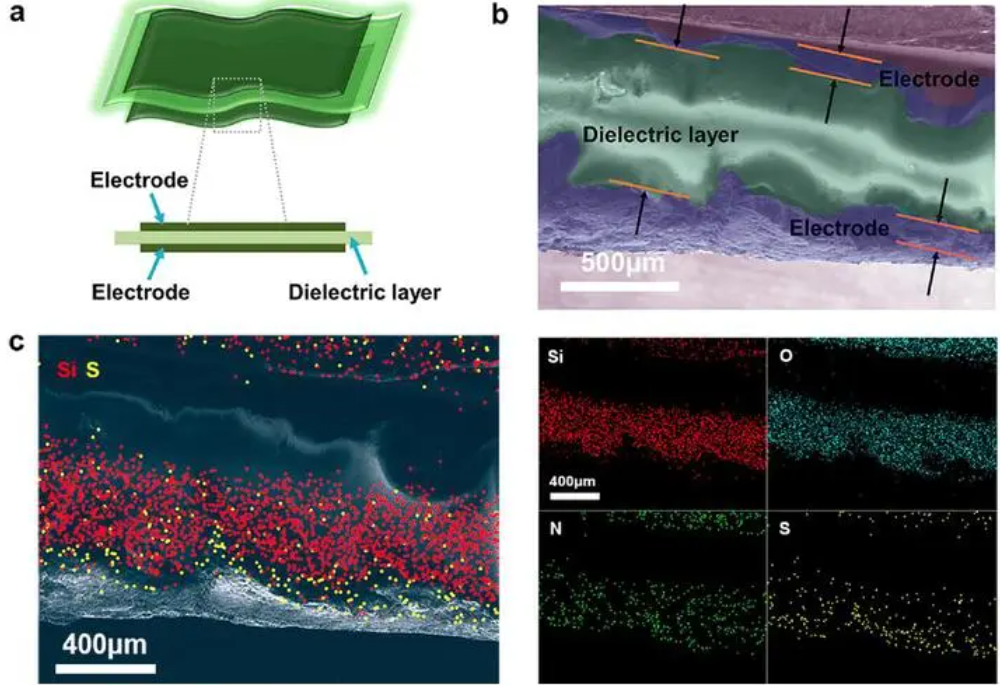
單側(cè)致動器由0.18 mm厚的PET基板、0.18 mm厚的加強框架以及雙面碳潤滑脂電極為活性層的預(yù)拉伸介電彈性體組成(圖1)。雙側(cè)致動器通過背靠背粘合兩個單側(cè)致動器而形成。與單側(cè)致動器相比,雙側(cè)致動器在穩(wěn)定性和尺寸控制方面表現(xiàn)更佳。在循環(huán)測試中,雙側(cè)致動器表現(xiàn)出更好的穩(wěn)定性,偏離角的標準偏差遠低于單側(cè)致動器。雙側(cè)致動器還可作為雙邊彎曲致動器,表現(xiàn)出增強的尺寸控制。通過雙側(cè)致動器的兩種驅(qū)動模式,研究人員設(shè)計了3D齒輪形機器人,可實現(xiàn)高度可控的多向運動。機器人的性能與PET基材的剛度和彈性體的預(yù)拉伸率有關(guān),通過調(diào)整這些參數(shù),可以優(yōu)化機器人的性能。
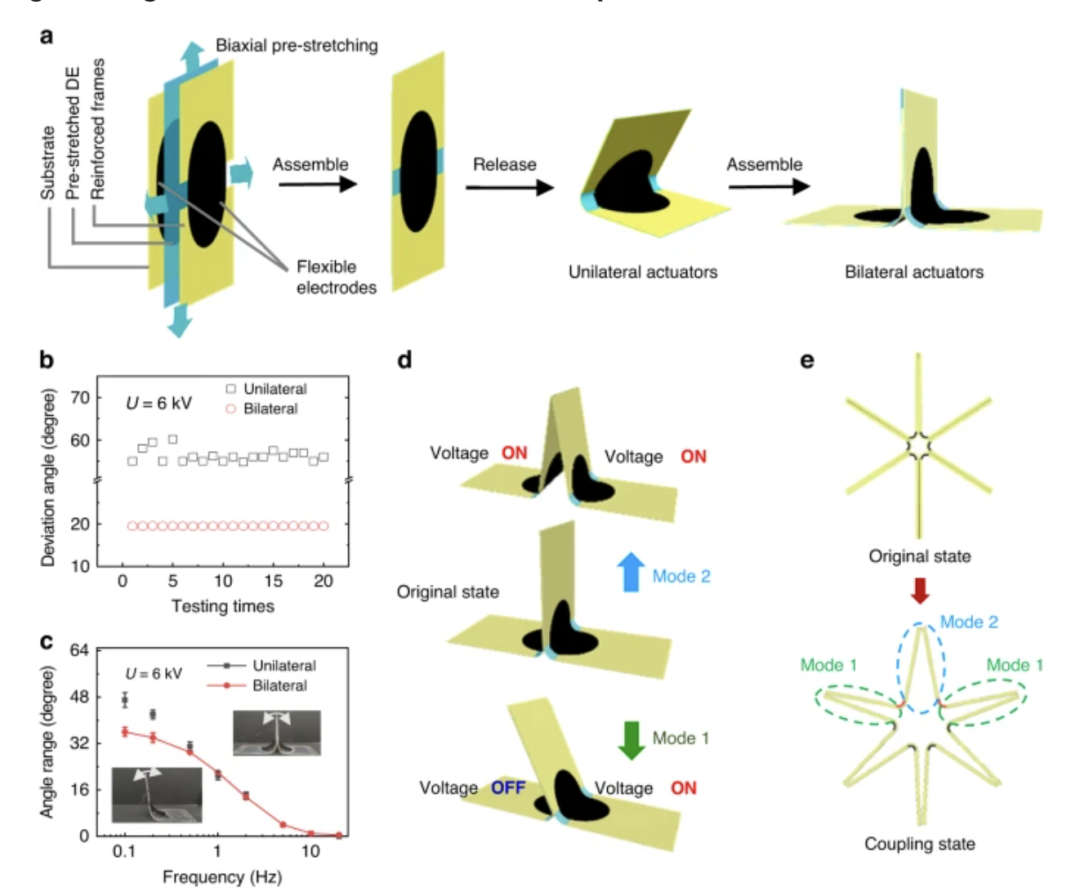
圖1.肌肉啟發(fā)的雙側(cè)致動器的設(shè)計和制造
接下來研究團隊研究了雙邊致動器在兩種不同驅(qū)動模式下的變形性能(圖2)。在第一個驅(qū)動模式中,左側(cè)啟動時向右彎曲,右側(cè)啟動時向左彎曲,達到18°和26°的偏差角分別在0.2秒和1秒的驅(qū)動時間內(nèi)。這種交替高壓驅(qū)動模式對應(yīng)于驅(qū)動模式1,可以通過組合不同的電壓值來獲得任何所需的彎曲角度。在第二個驅(qū)動模式中,兩側(cè)同時驅(qū)動,導(dǎo)致致動器中間產(chǎn)生間隙,隨著驅(qū)動時間的增加,間隙距離從10 mm增加到12 mm。循環(huán)性能測試顯示,驅(qū)動模式1下的雙邊致動器偏差角在4500次驅(qū)動循環(huán)后略微增加,而驅(qū)動模式2下的間隙距離也有輕微增加。此外,雙邊致動器產(chǎn)生的驅(qū)動力在mN級別,隨著電壓的增加而增加。在兩種驅(qū)動模式下,致動器的阻斷力確保了其在相當(dāng)長的循環(huán)中不會降低變形性能。這些結(jié)果為雙邊致動器的實際應(yīng)用提供了重要的性能數(shù)據(jù)。
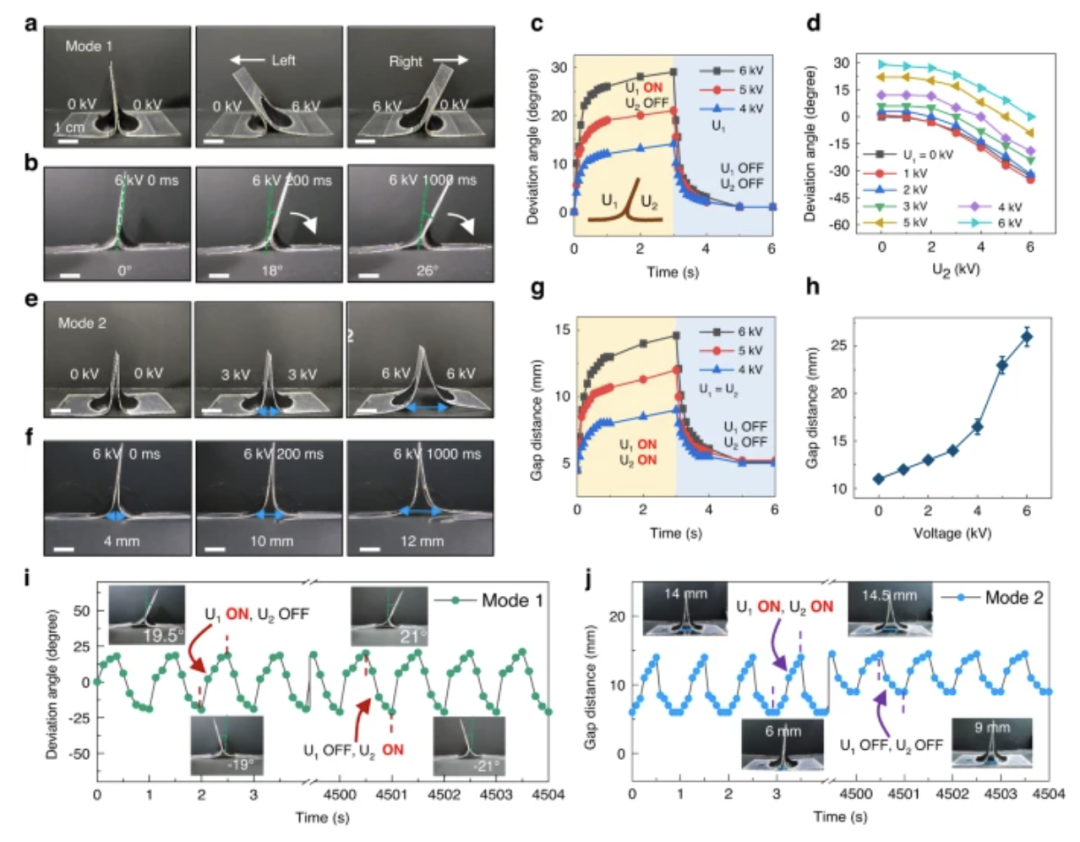
圖2.雙側(cè)致動器的性能介紹
基于雙側(cè)致動器在兩種驅(qū)動模式下的變形性能,研究團隊成功開發(fā)了一種3D齒輪形柔性機器人(圖3),通過多個致動器的協(xié)調(diào)運動實現(xiàn)了高度可控的多向爬行和滾動。該柔性機器人展示了在不同頻率下的爬行速度和步距的關(guān)系,以及在轉(zhuǎn)向控制方面的靈活性。通過將多個致動器首尾相連形成閉環(huán)機器人,機器人表現(xiàn)出多向?qū)ΨQ性,并在不同位置驅(qū)動致動器實現(xiàn)了向不同方向的快速移動。
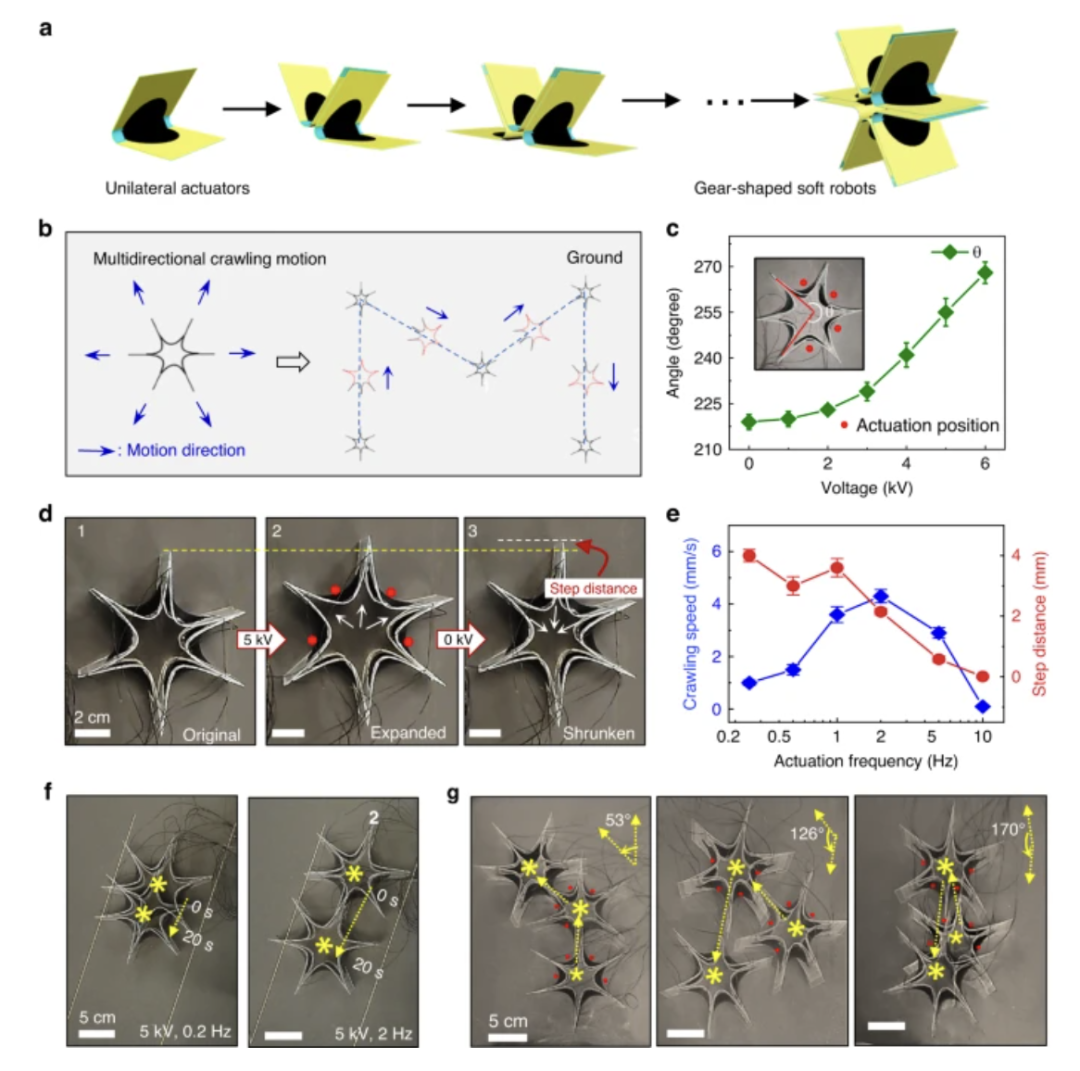
圖3.齒輪形3D柔性機器人及其爬行行為
在進一步的研究中,研究人員用齒輪形柔性機器人展示了一種新的操作方式,只用兩只腳著地,像滾動的柔性機器人一樣向前滾動。通過調(diào)整致動器的位置,可以改變機器人的重心,實現(xiàn)在地面甚至斜坡上的滾動行為。通過組裝七個致動器,研究團隊成功實現(xiàn)了這種滾動柔性機器人,并詳細研究了不同致動器組合下機器人重心的分布。該機器人不僅可以實現(xiàn)前進滾動,還能夠以相同的方式實現(xiàn)后退滾動,顯著提高了運動的可控性。通過在斜坡上的滾動測試,研究團隊驗證了該機器人在不同場景下的穩(wěn)定滾動運動,為其在實際應(yīng)用中的靈活性提供了更多可能性。
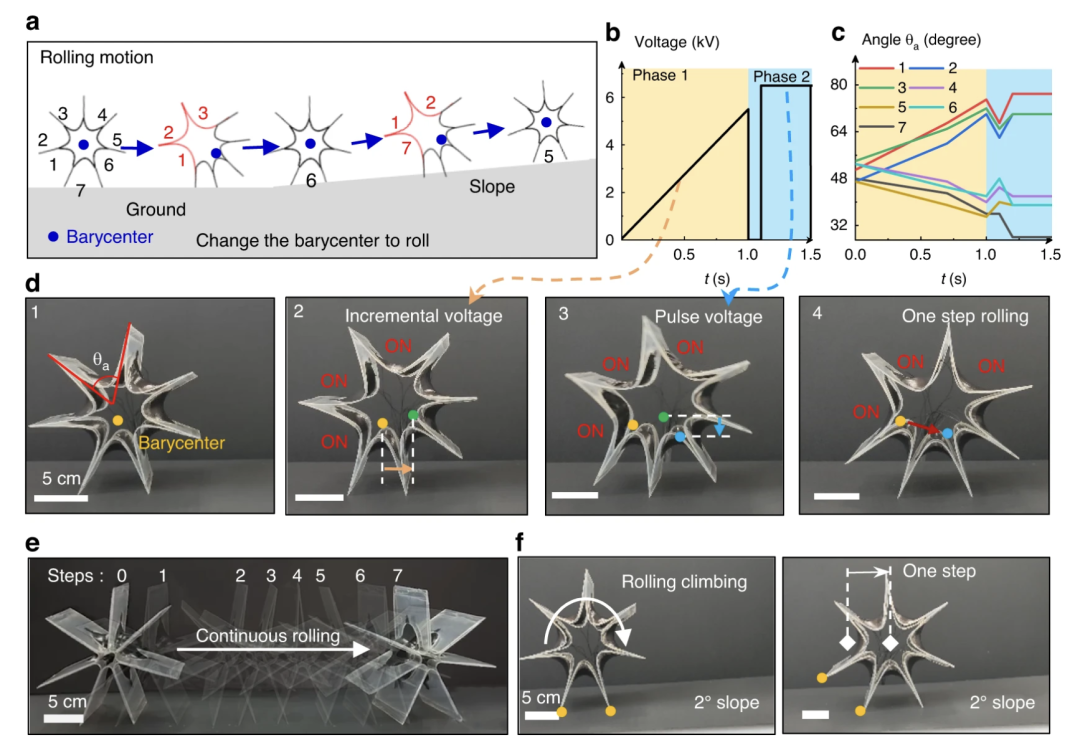
圖4.滾動柔性機器人
受到口腔內(nèi)的口輪匝肌啟發(fā),研究團隊通過連接多個執(zhí)行機構(gòu)形成的環(huán)形結(jié)構(gòu)成功實現(xiàn)了類似人嘴的抓取功能,被稱為“類嘴柔性機器人”。這種嘴狀機器人可以通過調(diào)整致動器上的致動電壓來調(diào)整其內(nèi)部尺寸,實現(xiàn)有效的抓取性能。在抓取性能測試中,嘴狀柔性機器人通過控制不同網(wǎng)格數(shù)的砂紙作為內(nèi)壁,成功撿起不同重量的乒乓球。雖然這款機器人展示了多樣化的運動形式和高度的可控性,但研究團隊指出其仍需解決外部電力設(shè)備驅(qū)動的笨重和運動模式切換手動控制的局限性,提出在進一步研究中可以考慮增加電池和控制電路,以實現(xiàn)更廣泛的應(yīng)用。
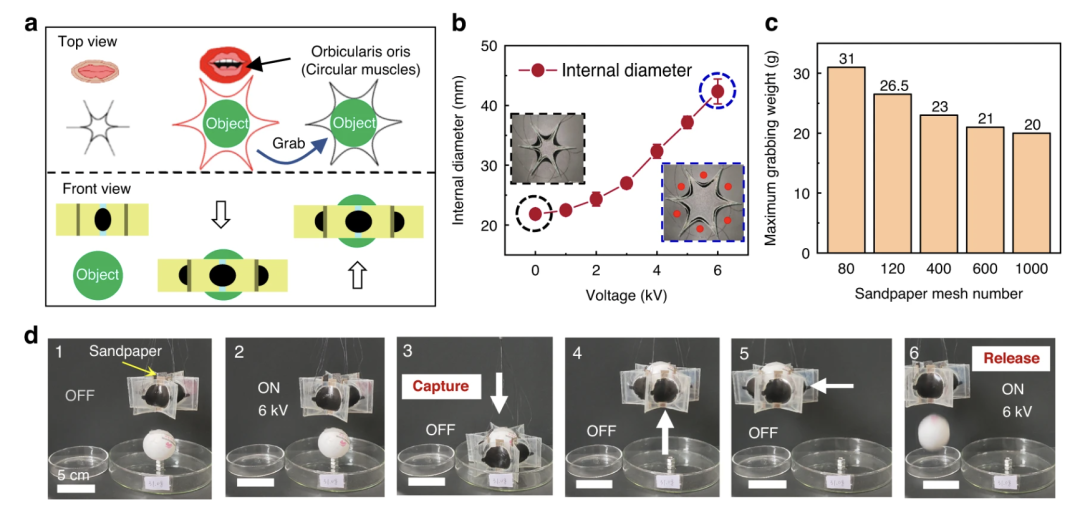
圖5.受口腔輪匝肌啟發(fā)的柔性機器人
總結(jié):
這項研究創(chuàng)新性的開發(fā)了一種受肌肉啟發(fā)的雙側(cè)柔性致動器,為仿生機器人設(shè)計提供了新的思路。通過深入研究雙側(cè)致動器在兩種驅(qū)動模式下的變形性能,實現(xiàn)了高度可控性。進一步,設(shè)計了一款集成雙側(cè)致動器的三維齒輪形柔性機器人,展現(xiàn)了出色的運動和物體操縱能力,包括多向爬行、雙向滾動等。此外,通過模仿口腔輪匝肌,成功實現(xiàn)了柔性機器人抓取和運輸物體的功能。整體而言,這項研究為高度可控的仿生三維柔性機器人的設(shè)計提供了重要的技術(shù)基礎(chǔ)和實踐經(jīng)驗,為未來機器人領(lǐng)域的發(fā)展帶來了創(chuàng)新性的貢獻。
文章來源:Bionic Science
審核編輯:湯梓紅
-
機器人
+關(guān)注
關(guān)注
210文章
28231瀏覽量
206618 -
致動器
+關(guān)注
關(guān)注
0文章
32瀏覽量
4101 -
軟體機器人
+關(guān)注
關(guān)注
1文章
111瀏覽量
11691 -
柔性機器人
+關(guān)注
關(guān)注
1文章
38瀏覽量
4525
原文標題:基于雙邊介電彈性體致動器的肌肉啟發(fā)軟體機器人
文章出處:【微信號:robotmagazine,微信公眾號:機器人技術(shù)與應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
高壓放大器在介電彈性體折紙術(shù)軟體機器人中的應(yīng)用
模仿蚯蚓開發(fā)軟體機器人
研發(fā)人員利用液晶彈性體設(shè)計了一種自動折疊機器人
高壓放大器基于介電彈性體最小能量結(jié)構(gòu)設(shè)計應(yīng)用
高壓放大器基于介電彈性體最小能量結(jié)構(gòu)設(shè)計應(yīng)用
高壓放大器基于介電彈性體最小能量結(jié)構(gòu)設(shè)計應(yīng)用
高壓放大器在介電彈性體驅(qū)動中有何應(yīng)用呢?
功率放大器在驅(qū)動介電彈性體機器人的應(yīng)用
功率放大器在驅(qū)動介電彈性體機器人的應(yīng)用

功率放大器在介電彈性體測試中的應(yīng)用案例

功率放大器如何驅(qū)動介電彈性體做運動?
Aigtek:介電彈性體高壓放大器在軟體機器人研究中的應(yīng)用

安泰功率放大器如何驅(qū)動介電彈性體做運動
安泰ATA-7030高壓放大器在介電彈性體智能材料中的應(yīng)用
安泰ATA-7000系列高壓放大器在介電彈性體驅(qū)動實驗中的應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論