 PT/PVT運動模式介紹:EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(十一)
PT/PVT運動模式介紹:EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(十一)
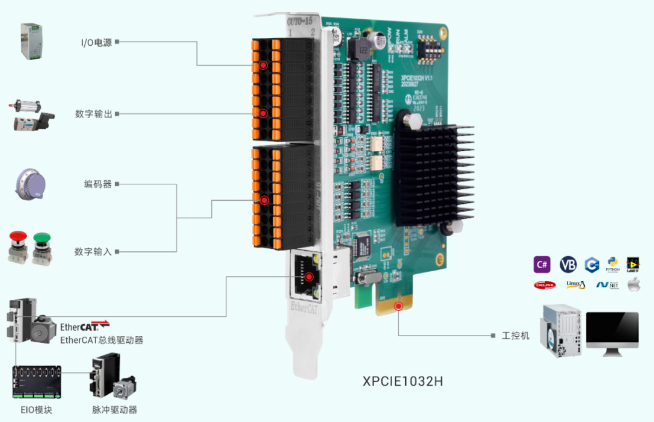
XPCIE1032H功能簡介
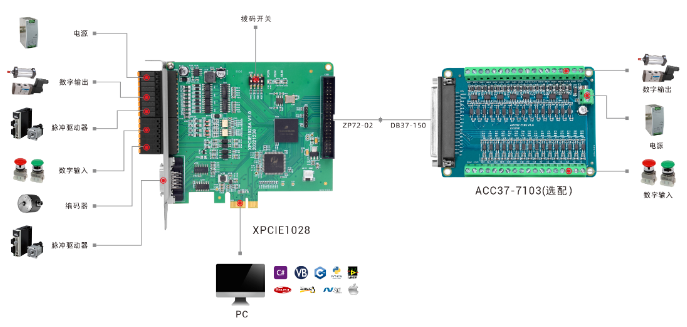
XPCIE1032H是一款基于PCI Express的EtherCAT總線運動控制卡,可選6-64軸運動控制,支持多路高速數字輸入輸出,可輕松實現多軸同步控制和高速數據傳輸。
XPCIE1032H集成了強大的運動控制功能,結合MotionRT7運動控制實時軟核,解決了高速高精應用中,PC Windows開發的非實時痛點,指令交互速度比傳統的PCI/PCIe快10倍。

XPCIE1032H支持PWM,PSO功能,板載16進16出通用IO口,其中輸出口全部為高速輸出口,可配置為4路PWM輸出口或者16路高速PSO硬件比較輸出口。輸入口含有8路高速輸入口,可配置為4路高速色標鎖存或兩路編碼器輸入。
XPCIE1032H搭配MotionRT7實時內核,使用本地LOCAL接口連接,通過高速的核內交互,可以做到更快速的指令交互,單條指令與多條指令一次性交互時間可以達到3-5us左右。
?XPCIE1032H與MotionRT7實時內核的配合具有以下優勢:
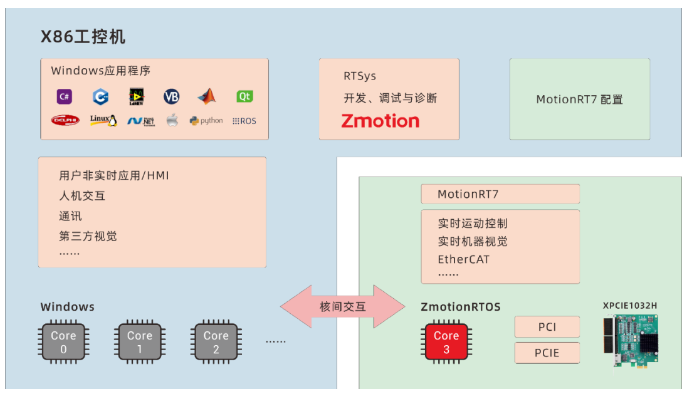
1.支持多種上位機語言開發,所有系列產品均可調用同一套API函數庫;
2.借助核內交互,可以快速調用運動指令,響應時間快至微秒級,比傳統PCI/PCIe快10倍;
3.解決傳統PCI/PCIe運動控制卡在Windows環境下控制系統的非實時性問題;
4.支持一維/二維/三維PSO(高速硬件位置比較輸出),適用于視覺飛拍、精密點膠和激光能量控制等應用;
5.提供高速輸入接口,便于實現位置鎖存;
6.支持EtherCAT總線和脈沖輸出混合聯動、混合插補。

?使用XPCIE1032H和MotionRT7進行項目開發時,通常需要進行以下步驟:
1.安裝驅動程序,識別XPCIE1032H;
2.打開并執行文件“MotionRT710.exe”,配置參數和運行運動控制實時內核;
3.使用ZDevelop軟件連接到控制器,進行參數監控。連接時請使用PCI/LOCAL方式,并確保ZDevelop軟件版本在3.10以上;
4.完成控制程序開發,通過LOCAL鏈接方式連接到運動控制卡,實現實時運動控制。

?與傳統PCI/PCIe卡和PLC的測試數據結果對比:
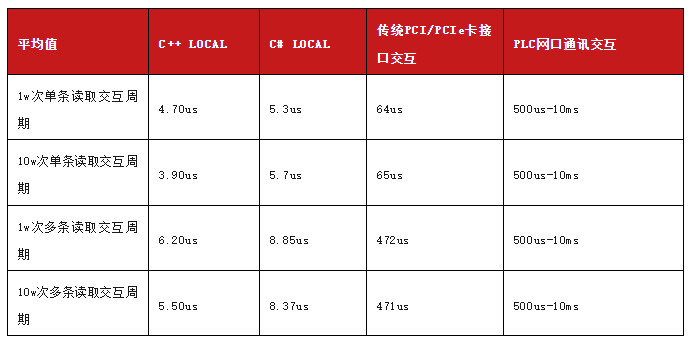
我們可以從測試對比結果看出,XPCIE1032H運動控制卡配合實時運動控制內核MotionRT7,在LOCAL鏈接(核內交互)的方式下,指令交互的效率是非常穩定,當測試數量從1w增加到10w時,單條指令交互時間與多條指令交互時間波動不大,非常適用于高速高精的應用。
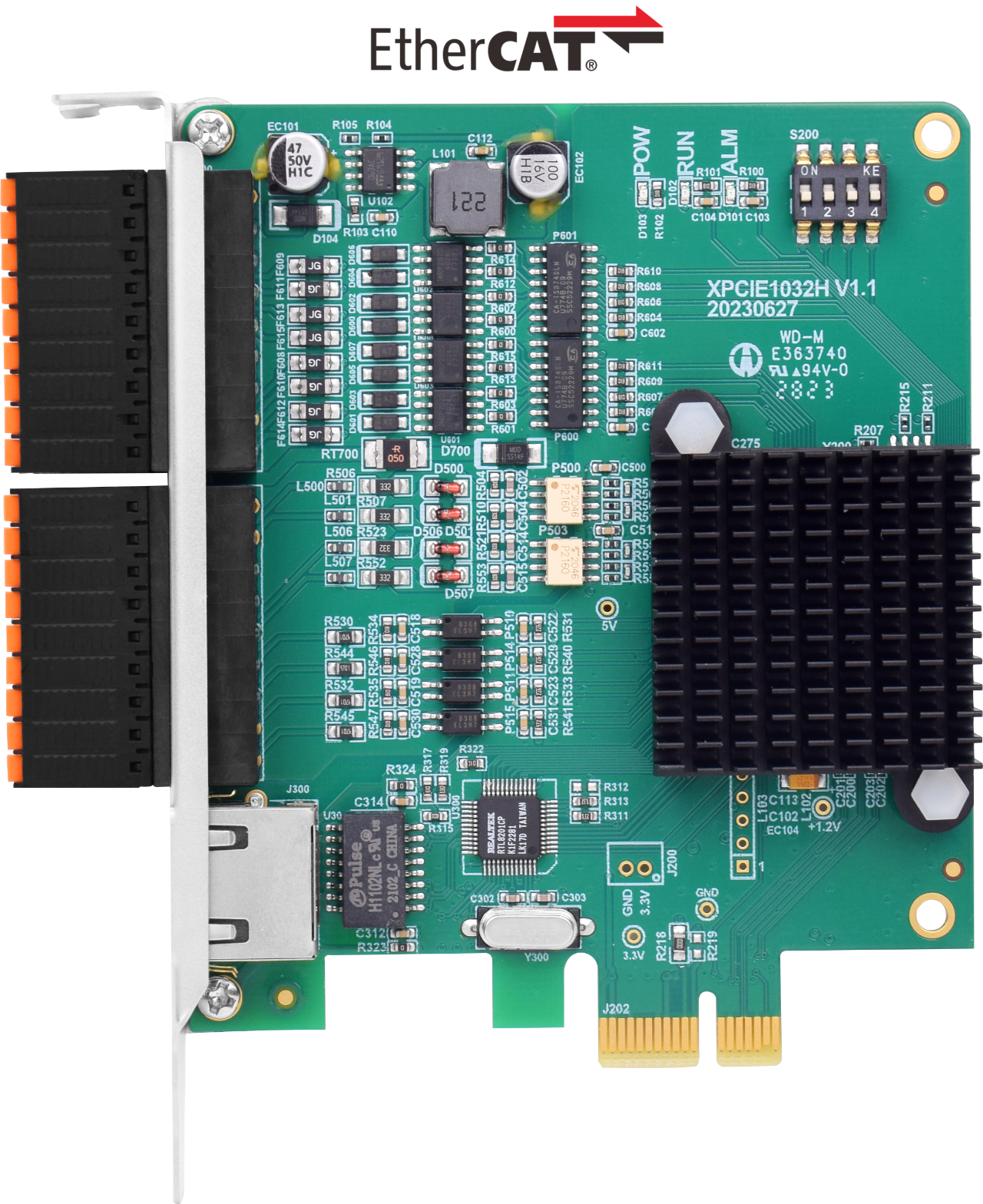
XPCIE1032H控制卡安裝
關閉計算機電源。
打開計算機機箱,選擇一條空閑的XPCIE卡槽,用螺絲刀卸下相應的擋板條。
將運動控制卡插入該槽,擰緊擋板條上的固定螺絲。
XPCIE1032H驅動安裝與建立連接參考往期文章EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(一):驅動安裝與建立連接。
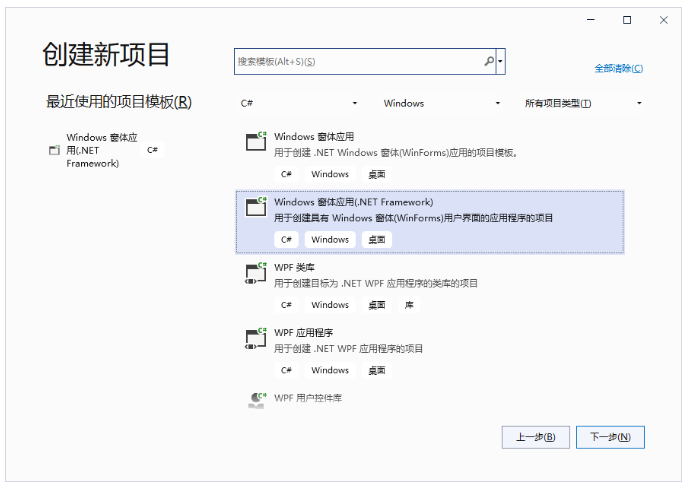
一、C#語言進行運動控制項目開發
二、PC函數介紹
相關PC函數介紹詳情可參考“ZMotion PC函數庫編程手冊 V2.1.1”。
1、控制器網口連接函數接口說明

2、多條相對PT運動接口說明
3、多條絕對PT運動接口說明
4、多條相對PVT運動接口說明
5、多條絕對PVT運動接口說明
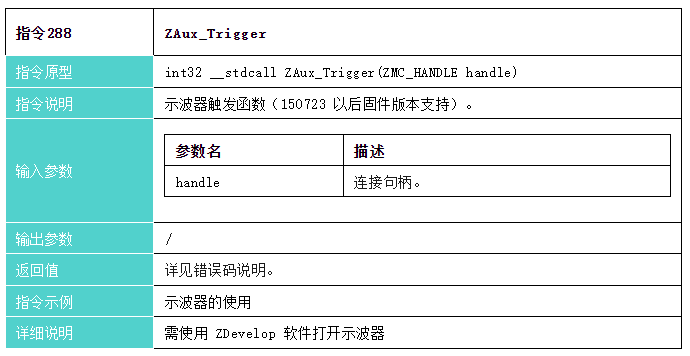
6、示波器觸發函數接口說明
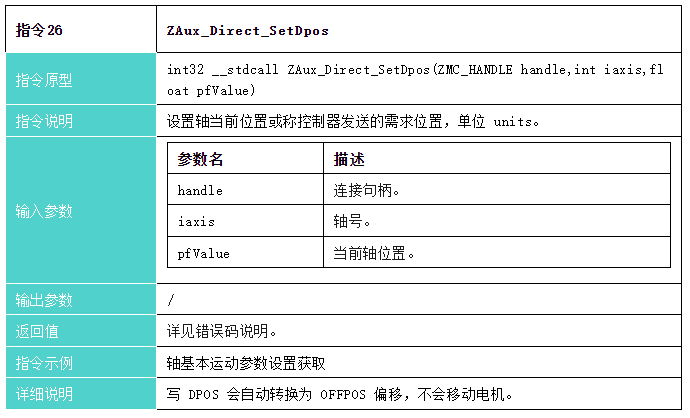
7、設置軸的規劃位置函數接口說明
三、PT/PVT運動介紹
1.PV運動說明
(1)PT運動:在一段時間內驅動電機運動設置的距離。一般是PC每個周期計算好對應的坐標,然后傳給控制器。
(2)PT算法:在用戶定義的”位置和時間”點之間,PT算法計算出一個合適的速度曲線。PT算法保證控制卡的軌跡計算符合每一個已知的點和時間。分段速度簡單的由位置和時間的差分計算出來。
(3)PT模式算法適用的場景:PT算法對于近距離的點位運動或者低速度的運動很合適。它是非常簡單的算法,需要很少的計算量,因此計算速度很快。在低性能的運動系統中很受歡迎。但如果點之間間隔太大,那么運動將會很粗糙,因為每一段的加速度將會顯得不連續。每個點之間的加速度是瞬時的。最好保證點的跨距在幾個采樣點之間。
(4)PT運動的PC函數庫接口:
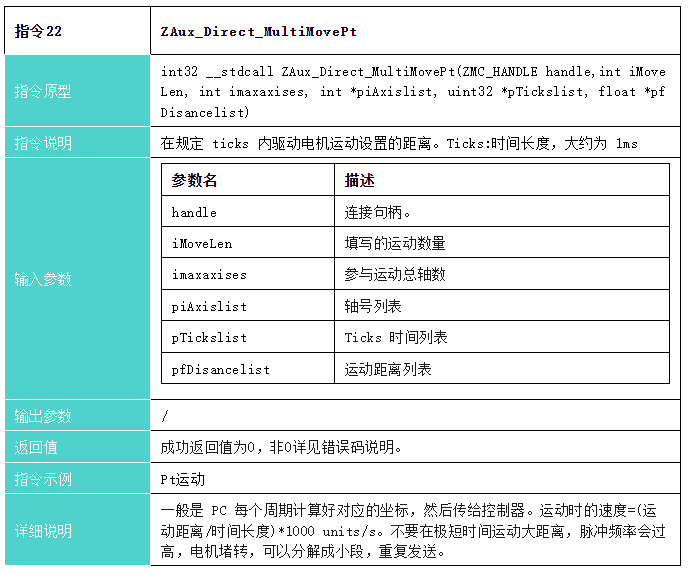
A.相對PT運動:ZAux_Direct_MultiMovePt(鏈接句柄,填寫的運動數量,參與運動總軸數,軸號列表,Ticks時間列表,運動距離列表)。
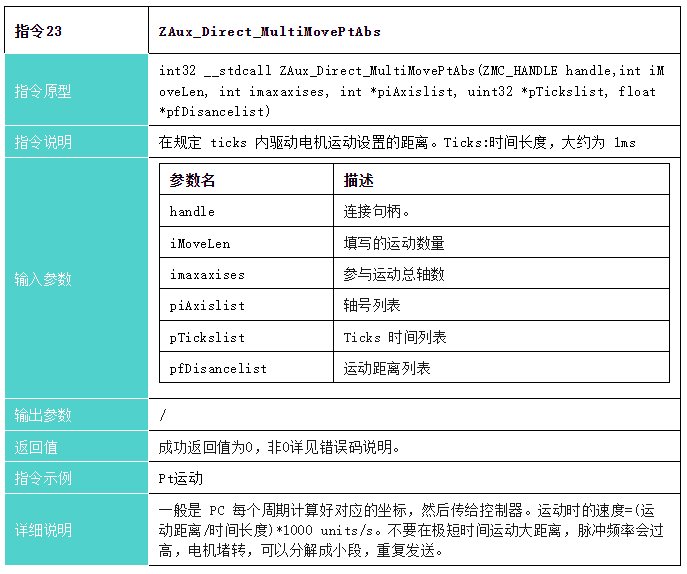
B.絕對PT運動:ZAux_Direct_MultiMovePtAbs(鏈接句柄,填寫的運動數量, 參與運動總軸數,軸號列表,Ticks時間列表,運動距離列表)。
2.PVT運動說明
(1)PVT運動:在一段時間內驅動電機運動設置的距離,帶速度規劃,可以指定結束速度,小段內速度會自動根據前面的速度與結束速度來自動規劃,盡可能連續。一般是PC每個周期計算好對應的坐標,然后傳給控制器。
(2)PVT算法:在用戶定義的“位置/速度/時間”點之間,PVT算法計算出合適的Jerk參數(加加速度,非恒定加速度)。這個算法保證軌跡計算合符每個已知點的位置、速度和時間。
(3)PVT模式算法適用的場景:PVT算法對于平滑軌跡和軌跡跟蹤非常有效。位置軌跡點可以間隔很近,也可以間隔很大。
例如:對于復雜的路徑,點位需要間隔很近;對于簡單的路徑,點位可以間隔很大。PVT可以手動指定點位置,但最困難的是確定每個點的合適速度值。
(4)PVT運動的PC函數庫接口:
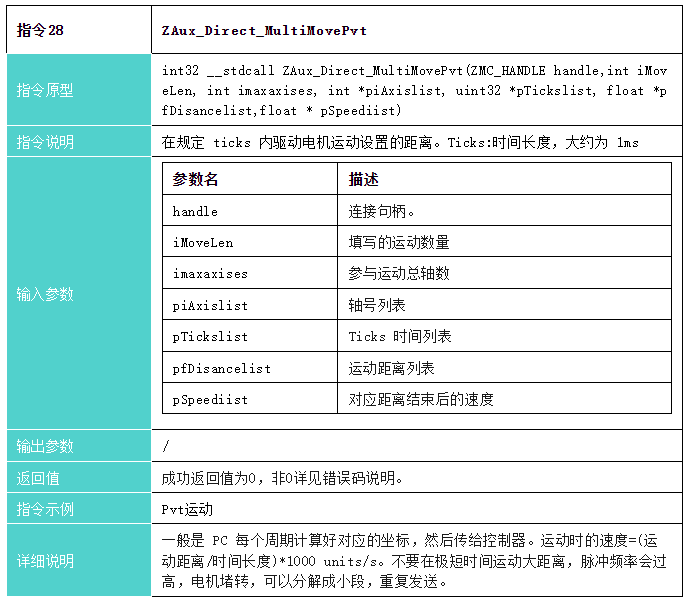
A.相對PVT運動:ZAux_Direct_MultiMovePvt(鏈接句柄,填寫的運動數量, 參與運動總軸數,軸號列表,Ticks時間列表,運動距離列表)。
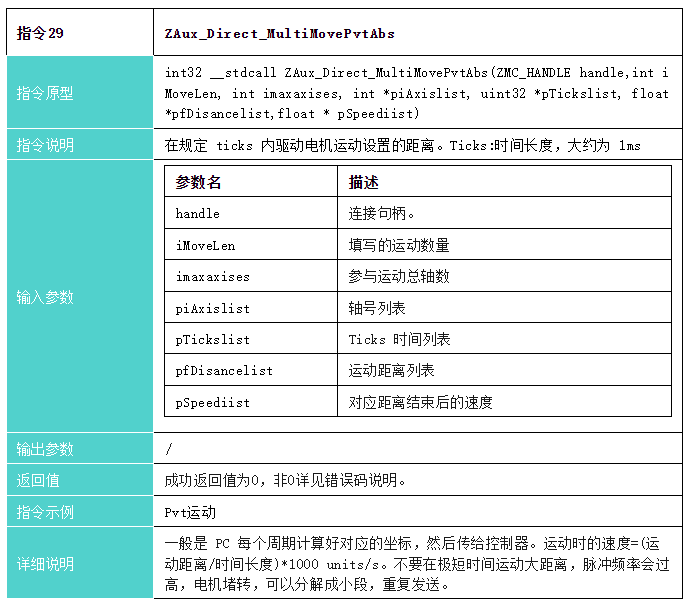
B.絕對PVT運動:ZAux_Direct_MultiMovePvtAbs(鏈接句柄,寫的運動數量,參與運動總軸數,軸號列表,Ticks時間列表,運動距離列表)。
3.PV/PVT運動重點說明
(1)在一段時間內驅動電機運動設置的距離。
(2)PT運動時的加速度、速度和減速度都是根據所設置的時間以及位置所規劃的。(3)一般是PC每個周期計算好對應的坐標,然后傳給控制器。(4)運動時的速度=(運動距離/時間長度)*1000 units/ms。(5)不要在極短時間運動大距離,脈沖頻率會過高,電機堵轉,可以分解成小段,重復發送。
注意:使用PT/PVT指令時,需記得配置快減減速度或者減速度,否則遇到異常,使用停止運動指令將不會停止。
四、例程說明
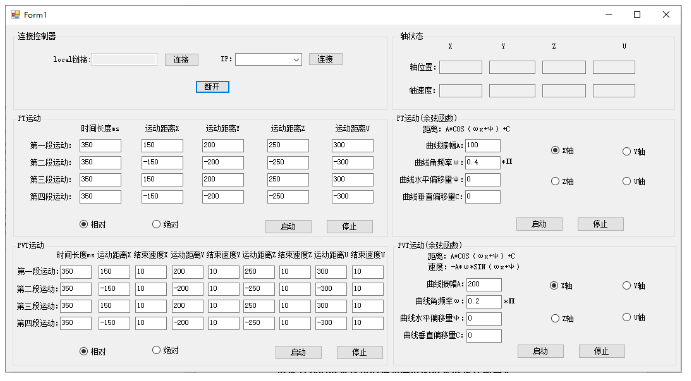
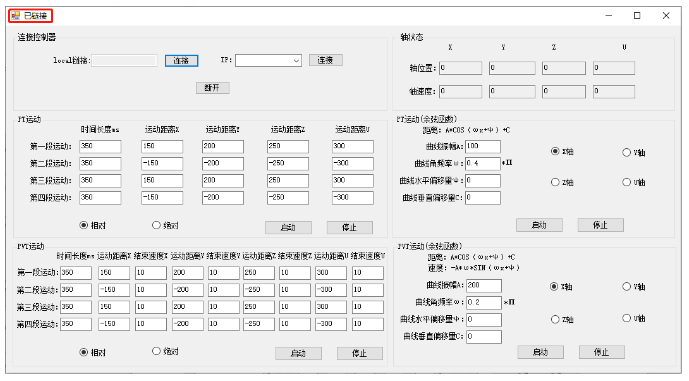
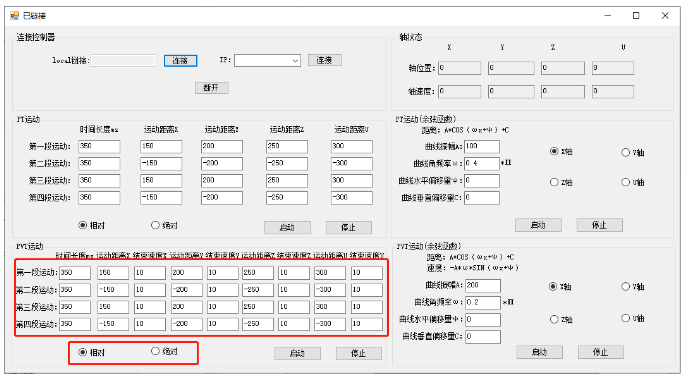
1.C#例程界面如下。
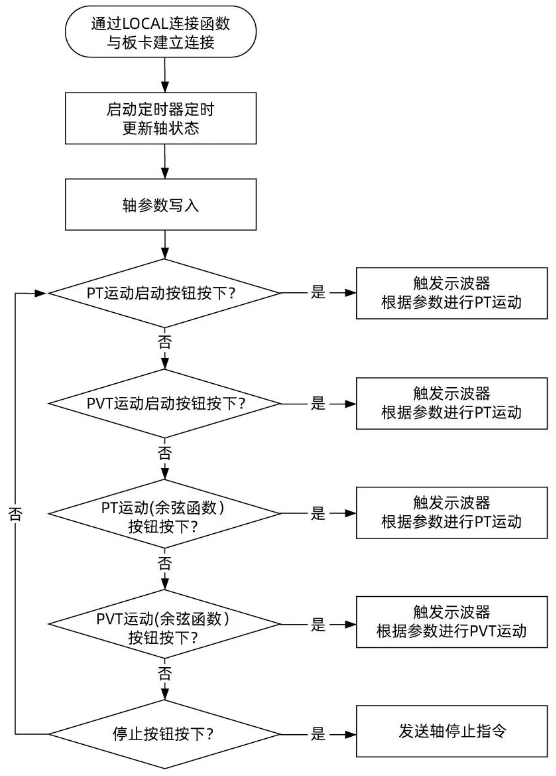
2.例程簡易流程圖如下。
3.要想通過上位機操控控制器,就必須先鏈接控制器。例如通過LOCAL鏈接方式的鏈接按鈕的消息響應函數來鏈接控制器。
private void button4_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
C_Close_Card_Click(sender, e);
}
zmcaux.ZAux_FastOpen(5, comboBox1.Text, 1000, out g_handle);
if (g_handle != (IntPtr)0)
{
this.Text = "已鏈接";
timer1.Enabled = true;
C_Move_Axis_TextChanged();
}
else
{
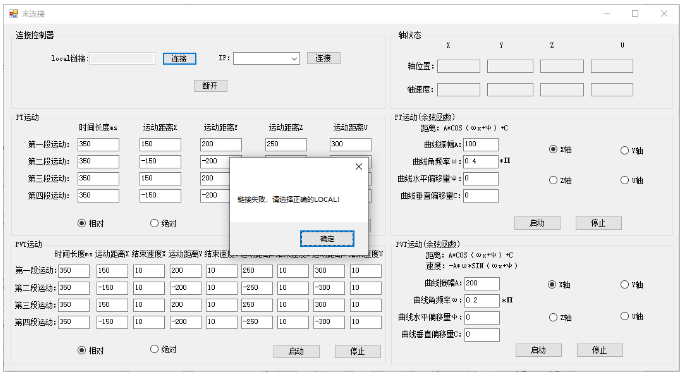
MessageBox.Show("鏈接失敗,請選擇正確的LOCAL!");
}
}
鏈接成功后,例程左上角會顯示已鏈接。如果鏈接失敗,還彈出“鏈接失敗,請選擇正確的LOCAL!”的彈窗。
4.軸參數寫入。鏈接成功后,會調用自定義的軸參數寫入函數。
private void C_Move_Axis_TextChanged()
{
float DposValue = 0;
float MposValue = 0;
int AType = 1; //設置軸的類型
int UnitValue = 100; //設置脈沖當量的值
int ret = 0;
for (int i = 0; i < 4; i++)
{
ret += zmcaux.ZAux_Direct_SetAtype(g_handle, i, AType); //設置軸的類型
ret += zmcaux.ZAux_Direct_SetUnits(g_handle, i, UnitValue); //設置軸的脈沖當量
ret += zmcaux.ZAux_Direct_SetFastDec(g_handle, i, 10000); //設置快減減速度
ret += zmcaux.ZAux_Direct_SetDpos(g_handle, i, DposValue); //軸Dpos 清 0
ret += zmcaux.ZAux_Direct_SetMpos(g_handle, i, MposValue); //軸MPOS 清 0
}
}
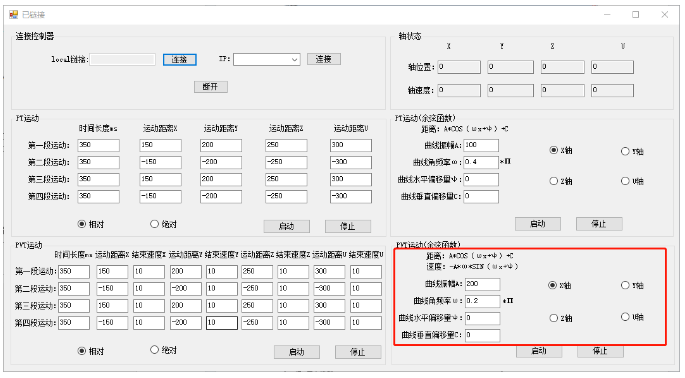
五、PT運動參數設置及運行效果
1.PT運動(未規劃速度和軌跡)
PT運動一般配合三角函數使用,如果直接使用PT運動,運動曲線和速度曲線會很不平滑。
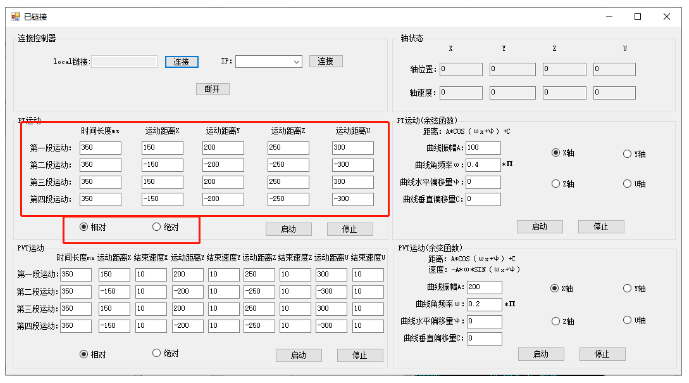
(1)輸入PT運動參數,并選擇相對PT運動還是絕對PT運動。
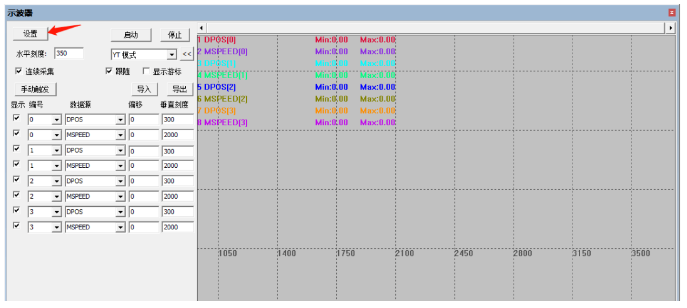
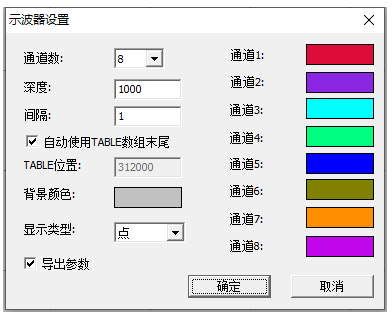
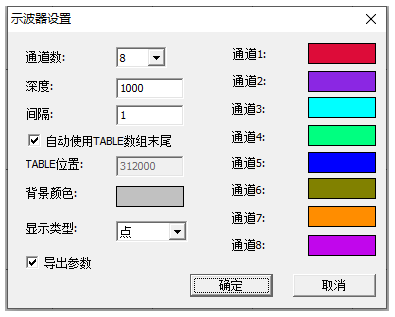
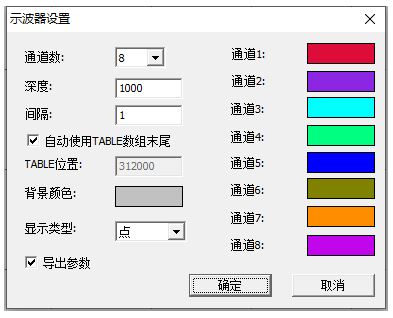
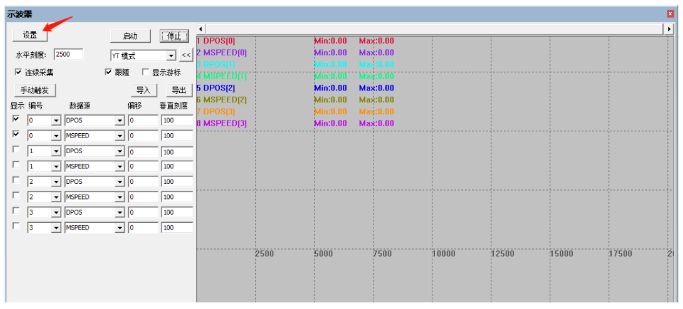
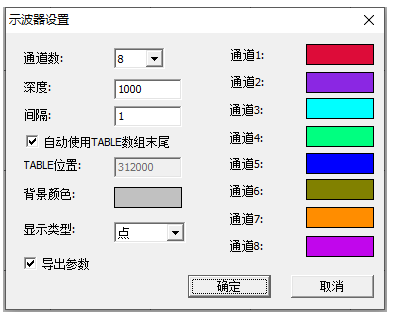
(2)把ZDevelop軟件LOCAl連接到控制卡,打開Zdevelop的示波器,把示波器的通道數設置為8,按下圖設置示波參數后,啟動示波器。
(3)啟動PT運動。因為添加了PC函數庫中的示波器觸發函數,點擊PT運動的啟動按鈕后,示波器會被觸發,PT運動軌跡如下圖所示。
 相對PT運動
相對PT運動 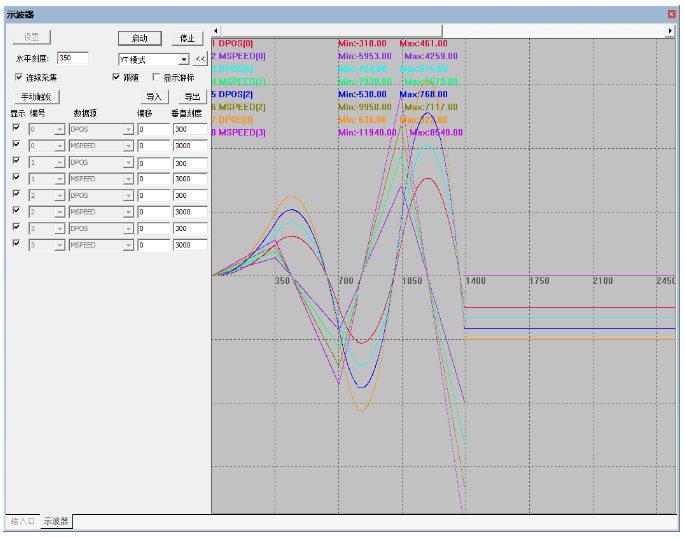 絕對PT運動
絕對PT運動
private void button1_Click(object sender, EventArgs e)
{
uint[] Tims=new uint[4];//相對絕對 PT 運動時間規劃
float[] DposList=new float[16];//相對 PT 運動距離規劃
int[] iaxis = new int[4];//軸列表
int i;
Tims[0] = Convert.ToUInt32(textBox9.Text);
Tims[1] = Convert.ToUInt32(textBox13.Text);
Tims[2] = Convert.ToUInt32(textBox12.Text);
Tims[3] = Convert.ToUInt32(textBox63.Text);
iaxis[0] = 0;
iaxis[1] = 1;
iaxis[2] = 2;
iaxis[3] = 3;
DposList[0] = Convert.ToInt32(textBox10.Text);
DposList[1] = Convert.ToInt32(textBox15.Text);
DposList[2] = Convert.ToInt32(textBox18.Text);
DposList[3] = Convert.ToInt32(textBox21.Text);
DposList[4] = Convert.ToInt32(textBox14.Text);
DposList[5] = Convert.ToInt32(textBox16.Text);
DposList[6] = Convert.ToInt32(textBox19.Text);
DposList[7] = Convert.ToInt32(textBox22.Text);
DposList[8] = Convert.ToInt32(textBox11.Text);
DposList[9] = Convert.ToInt32(textBox17.Text);
DposList[10] = Convert.ToInt32(textBox20.Text);
DposList[11] = Convert.ToInt32(textBox23.Text);
DposList[12] = Convert.ToInt32(textBox64.Text);
DposList[13] = Convert.ToInt32(textBox62.Text);
DposList[14] = Convert.ToInt32(textBox61.Text);
DposList[15] = Convert.ToInt32(textBox60.Text);
zmcaux.ZAux_Direct_SetDpos(g_handle, 0, 0);
zmcaux.ZAux_Direct_SetDpos(g_handle, 1, 0);
zmcaux.ZAux_Direct_SetDpos(g_handle, 2, 0);
zmcaux.ZAux_Direct_SetDpos(g_handle, 3, 0);
zmcaux.ZAux_Trigger(g_handle);
if (radioButton9.Checked == true)
{
zmcaux.ZAux_Direct_MultiMovePt(g_handle, 4, 4, iaxis, Tims, DposList);
}
else if (radioButton10.Checked == true)
{
zmcaux.ZAux_Direct_MultiMovePtAbs(g_handle, 4, 4, iaxis, Tims, DposList);
}
}
2、PT運動(余弦函數)
因為直接使用PT運動的運動曲線和速度曲線很不平滑,所以在PT運動一般配合三角函數使用。這里用余弦函數作例子。
(1)PT運動(余弦函數)參數說明。
運動距離:A * COS(ωx + ψ)+C
A:代表振幅,決定了曲線的峰值和谷值
ω:代表角頻率,它影響了曲線的周期性,周期T = 2π/ω。
ψ:代表相位角,可以理解為曲線的水平偏移量。
C:代表常數項,會對整個曲線產生上下平移。
(2)輸入PT運動(余弦函數)參數并選擇運動軸。

(3)把ZDevelop軟件LOCAl連接到控制卡,打開ZDevelop示波器窗口,把示波器的通道數設置為8,按下圖設置示波參數后,啟動示波器。
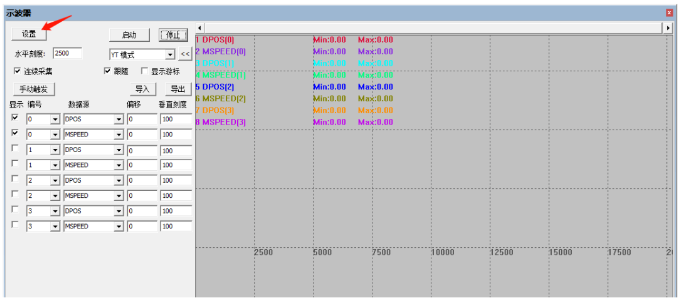
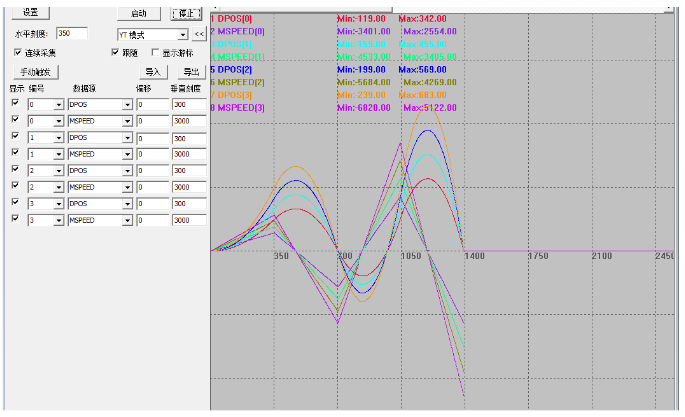
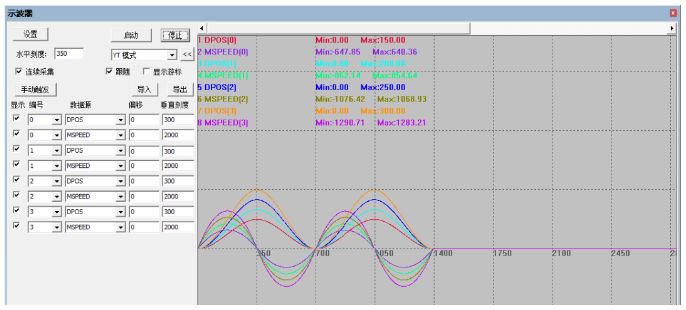
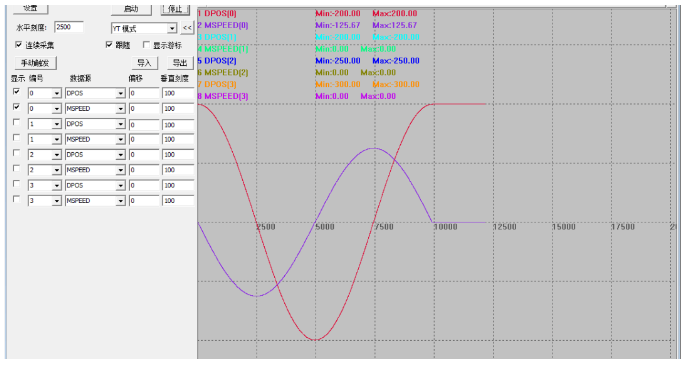
(4)啟動PT運動(余弦函數)。因為添加了PC函數庫中的示波器觸發函數,點擊PT運動(余弦函數)的啟動按鈕后,示波器會被觸發,PT運動(余弦函數)軌跡如下圖。
注意:雖然示波器上運動曲線的起點是100,但是實際上軸是從零的位置開始運動的,這是為了讓運動曲線和速度曲線的關系更直改,所以把運動曲線的起點設置為峰值。
(5)通過對比PT運動(未規劃速度和軌跡)和PT運動(余弦函數)的運動曲線和速度曲線,會發現PT運動(未規劃速度和軌跡)的運動曲線和速度曲線更尖銳,PT運動(余弦函數)的運動曲線和速度曲線更平滑。
 PT運動(余弦函數)
PT運動(余弦函數) 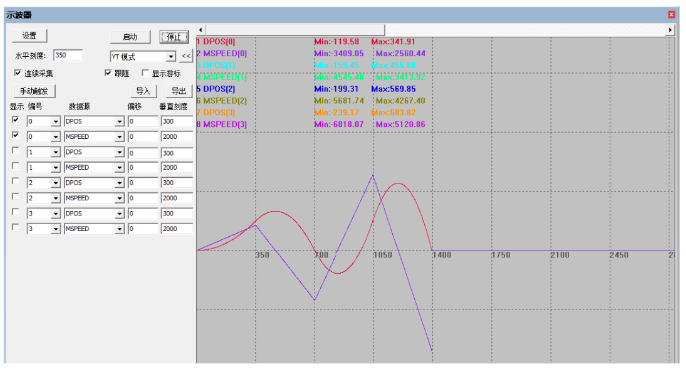 PT運動(未規劃速度和軌跡)
PT運動(未規劃速度和軌跡)
private void button7_Click(object sender, EventArgs e)
{
if (radioButton1.Checked == true)
{
nAxis = 0;
}
else if(radioButton4.Checked == true)
{
nAxis = 1;
}
else if (radioButton2.Checked == true)
{
nAxis = 2;
}
else if (radioButton3.Checked == true)
{
nAxis = 3;
}
uint[] Tims = new uint[1];//絕對 PT 運動時間規劃
float[] DposList = new float[1]; //絕對 PT 運動距離規劃
int[] iaxis = new int[1];
double x = 0;
double A = Convert.ToDouble(textBox80.Text);
double ω = Convert.ToDouble(textBox78.Text) * Math.PI;
double ψ = Convert.ToDouble(textBox79.Text);
double C = Convert.ToDouble(textBox77.Text);
Tims[0] = 10;
iaxis[0] = nAxis;
zmcaux.ZAux_Direct_SetDpos(g_handle, nAxis, (float)(A * Math.Cos(ω * x + ψ) + C));
zmcaux.ZAux_Trigger(g_handle);
while (true)
{
//x = A * COS(ωx + ψ)+C
DposList[0] = (float)(A * Math.Cos(ω * x + ψ) + C);
zmcaux.ZAux_Direct_MultiMovePtAbs(g_handle, 1, 1, iaxis, Tims, DposList);
x = x + 0.01; //x的增加的數量是運動時間除以1000,運動時間改變時,x的增加的數量也要跟著改變
if (x > (2 * Math.PI / Math.Abs(ω)))
{
break;
}
}
}
六、PVT運動參數設置及運行效果
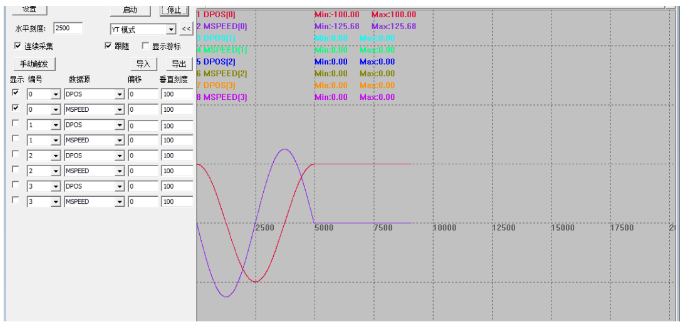
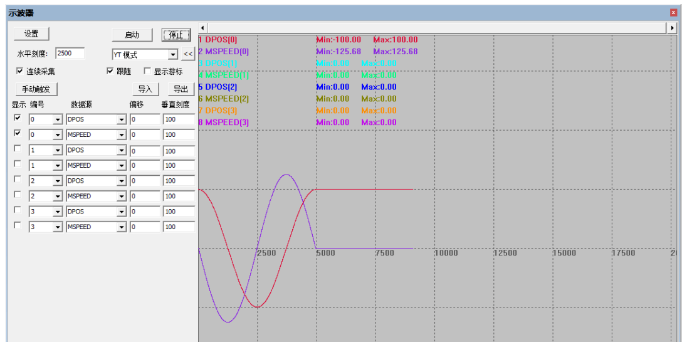
1.PVT運動(未規劃速度與軌跡)
PVT運動一般配合三角函數使用,如果直接使用PVT運動,運動曲線和速度曲線會很不平滑。
(1)輸入PVT運動參數,并選擇相對PVT運動還是絕對PVT運動。
(2)把ZDevelop軟件LOCAl連接到控制卡,打開ZDevelop示波器窗口,把示波器的通道數設置為8,按下圖設置示波參數后,啟動示波器。

(3)啟動PVT運動。因為添加了PC函數庫中的示波器觸發函數,點擊PVT運動的啟動按鈕后,示波器會被觸發,PVT運動軌跡如下圖。
 相對PVT運動
相對PVT運動 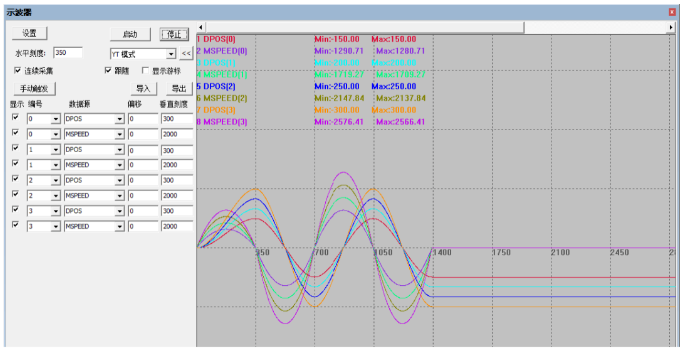 絕對PVT運動
絕對PVT運動
private void button5_Click(object sender, EventArgs e)
{
uint[] Tims=new uint[4];//相對絕對 PT 運動時間規劃
float[] DposList=new float[16];//相對 PT 運動距離規劃
float[] Speediist = new float[16];//相對 PT 運動速度規劃
int[] iaxis = new int[4];//軸列表
int ret = 0;
Tims[0] = Convert.ToUInt32(textBox9.Text);
Tims[1] = Convert.ToUInt32(textBox13.Text);
Tims[2] = Convert.ToUInt32(textBox12.Text);
Tims[3] = Convert.ToUInt32(textBox63.Text);
iaxis[0] = 0;
iaxis[1] = 1;
iaxis[2] = 2;
iaxis[3] = 3;
DposList[0] = Convert.ToInt32(textBox10.Text);
DposList[1] = Convert.ToInt32(textBox15.Text);
DposList[2] = Convert.ToInt32(textBox18.Text);
DposList[3] = Convert.ToInt32(textBox21.Text);
DposList[4] = Convert.ToInt32(textBox14.Text);
DposList[5] = Convert.ToInt32(textBox16.Text);
DposList[6] = Convert.ToInt32(textBox19.Text);
DposList[7] = Convert.ToInt32(textBox22.Text);
DposList[8] = Convert.ToInt32(textBox11.Text);
DposList[9] = Convert.ToInt32(textBox17.Text);
DposList[10] = Convert.ToInt32(textBox20.Text);
DposList[11] = Convert.ToInt32(textBox23.Text);
DposList[12] = Convert.ToInt32(textBox64.Text);
DposList[13] = Convert.ToInt32(textBox62.Text);
DposList[14] = Convert.ToInt32(textBox61.Text);
DposList[15] = Convert.ToInt32(textBox60.Text);
Speediist [0] = Convert.ToInt32(textBox10.Text);
Speediist [1] = Convert.ToInt32(textBox15.Text);
Speediist [2] = Convert.ToInt32(textBox18.Text);
Speediist [3] = Convert.ToInt32(textBox21.Text);
Speediist [4] = Convert.ToInt32(textBox14.Text);
Speediist [5] = Convert.ToInt32(textBox16.Text);
Speediist [6] = Convert.ToInt32(textBox19.Text);
Speediist [7] = Convert.ToInt32(textBox22.Text);
Speediist [8] = Convert.ToInt32(textBox11.Text);
Speediist [9] = Convert.ToInt32(textBox17.Text);
Speediist [10] = Convert.ToInt32(textBox20.Text);
Speediist [11] = Convert.ToInt32(textBox23.Text);
Speediist [12] = Convert.ToInt32(textBox64.Text);
Speediist [13] = Convert.ToInt32(textBox62.Text);
Speediist [14] = Convert.ToInt32(textBox61.Text);
Speediist [15] = Convert.ToInt32(textBox60.Text);
zmcaux.ZAux_Direct_SetDpos(g_handle, 0, 0);
zmcaux.ZAux_Direct_SetDpos(g_handle, 1, 0);
zmcaux.ZAux_Direct_SetDpos(g_handle, 2, 0);
zmcaux.ZAux_Direct_SetDpos(g_handle, 3, 0);
zmcaux.ZAux_Trigger(g_handle);
if (radioButton11.Checked == true)
{
zmcaux.ZAux_Direct_MultiMovePvt(g_handle,4,4,iaxis,Tims,DposList,Speediist);
}
else if (radioButton12.Checked == true)
{
zmcaux.ZAux_Direct_MultiMovePvtAbs(g_handle,4,4,iaxis,Tims,DposList,Speediist);
}
}
2.PVT運動(余弦函數)
PT運動跟PVT運動的區別在于多了個運動結束速度的參數,所以只要用運動的實時速度作為運動的結束速度,那PVT運動(余弦函數)跟PT運動(余弦函數)的運動曲線就是一樣的了。運動的實時速度可以由運動距離求導得出。
(1)PVT運動(余弦函數)參數說明。
運動距離:A * COS(ωx + ψ)+C
運動結束速度:-A*ω*SIN(ωx+ψ)
A:代表振幅,決定了曲線的峰值和谷值
ω:代表角頻率,它影響了曲線的周期性,周期T = 2π/ω。
ψ:代表相位角,可以理解為曲線的水平偏移量。
C:代表常數項,會對整個曲線產生上下平移。
(2)輸入PVT運動參數并選擇運動軸。
(3)把ZDevelop軟件LOCAl連接到控制卡,打開ZDevelop示波器窗口,將示波器的通道數設置為8,按下圖設置示波參數后,啟動示波器。
(4)啟動PT運動(余弦函數)。因為添加了PC函數庫中的示波器觸發函數,點擊PT運動的啟動按鈕后,示波器會被觸發,PVT運動軌跡如下圖。
注意:雖然示波器上運動曲線的起點是200,但是實際上軸是從零的位置開始運動的,這是為了讓運動曲線和速度曲線的關系更直改,所以把運動曲線的起點設置為峰值。
(5)通過對比PVT運動(只規劃軌跡,未規劃速度)和PVT運動(余弦函數)的速度曲線,會發現PVT運動(只規劃軌跡,未規劃速度)的速度曲線波動很大,好像有5條速度曲線一樣,PVT運動(余弦函數)的速度曲線就很正常。
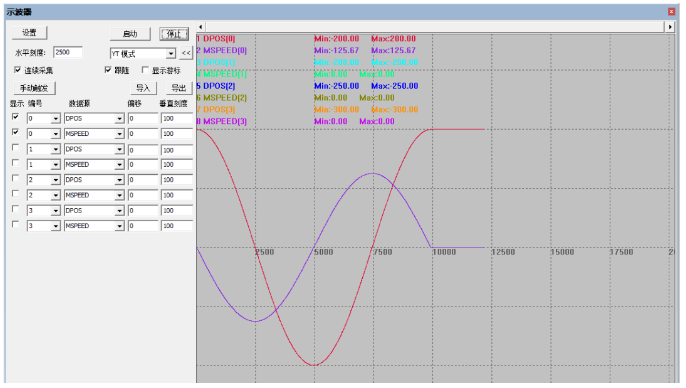 PVT運動(余弦函數)
PVT運動(余弦函數) 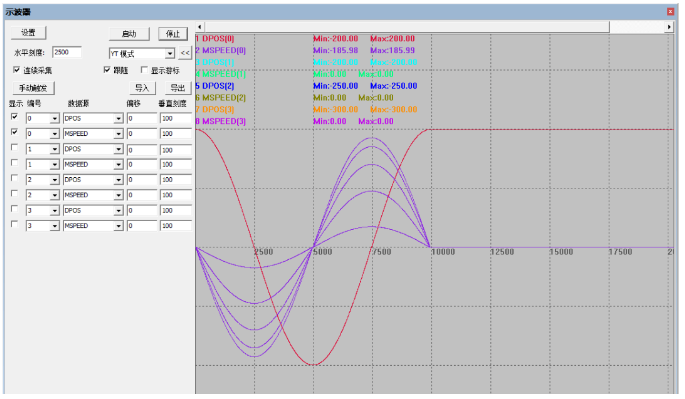 PVT運動(只規劃軌跡,未規劃速度)
PVT運動(只規劃軌跡,未規劃速度)
private void button9_Click(object sender, EventArgs e)
{
if (radioButton5.Checked == true)
{
nAxis1 = 0;
}
else if (radioButton8.Checked == true)
{
nAxis1 = 1;
}
else if (radioButton6.Checked == true)
{
nAxis1 = 2;
}
else if (radioButton7.Checked == true)
{
nAxis1 = 3;
}
uint[] Tims = new uint[1];//絕對 PT 運動時間規劃
float[] DposList = new float[1]; //絕對 PT 運動距離規劃
float[] Speediist = new float[1];//絕對 PT 運動速度規劃
int[] iaxis = new int[1];
double x = 0;
double A = Convert.ToDouble(textBox96.Text);
double ω = Convert.ToDouble(textBox94.Text) * Math.PI;
double ψ = Convert.ToDouble(textBox95.Text);
double C = Convert.ToDouble(textBox93.Text);
Tims[0] = 10;
iaxis[0] = nAxis1;
zmcaux.ZAux_Direct_SetDpos(g_handle, nAxis, (float)(A * Math.Cos(ω*x + ψ)+C));
zmcaux.ZAux_Trigger(g_handle);
while (true)
{
//x = A * COS(ωx + ψ)+C
DposList[0] = (float)(A * Math.Cos(ω * x + ψ) + C);
Speediist[0]= (float)(-A * ω * Math.Sin(ω*x+ ψ));
zmcaux.ZAux_Direct_MultiMovePvtAbs(g_handle, 1, 1, iaxis, Tims, DposList, Speediist);
x = x + 0.01; //x的增加的數量是運動時間除以1000,運動時間改變時,x的增加的數量也要跟著改變
if (x > (2 * Math.PI / Math.Abs(ω)))
{
break;
}
}
}
本次,正運動技術PV/PVT運動模式介紹:EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(十一),就分享到這里。
更多精彩內容請關注“正運動小助手”公眾號,需要相關開發環境與例程代碼,請咨詢正運動技術銷售工程師。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
審核編輯 黃宇
-
控制器
+關注
關注
112文章
16197瀏覽量
177395 -
運動控制
+關注
關注
4文章
565瀏覽量
32825 -
運動控制卡
+關注
關注
7文章
108瀏覽量
15444 -
ethercat
+關注
關注
18文章
653瀏覽量
38601 -
正運動技術
+關注
關注
0文章
96瀏覽量
326
發布評論請先 登錄
相關推薦
EtherCAT運動控制卡XPCIE1032H上位機開發(一):驅動安裝

單軸PSO視覺飛拍與精準輸出:EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(七)
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(九)
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(十三)
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(十四)




不止10倍提速!PCIe EtherCAT實時運動控制卡XPCIE1032H 等您評測!

EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(一):驅動安裝與建立連接
EtherCAT超高速實時運動控制卡(二):EtherCAT總線初始化

EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發





 工商網監
工商網監
評論