 步進電機工作原理 步進電機最簡單的驅動方法
步進電機工作原理 步進電機最簡單的驅動方法
步進電機是一種將電脈沖信號轉換為角位移的電動機。它具有準確性、控制性和可靠性強的特點,在許多領域得到廣泛應用,例如機械、儀器設備、電子信息等。理解步進電機的工作原理以及最簡單的驅動方法,有助于更好地應用和設計步進電機系統。
步進電機工作原理
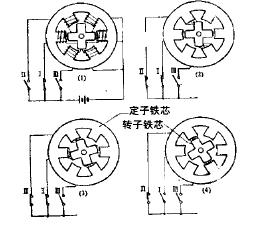
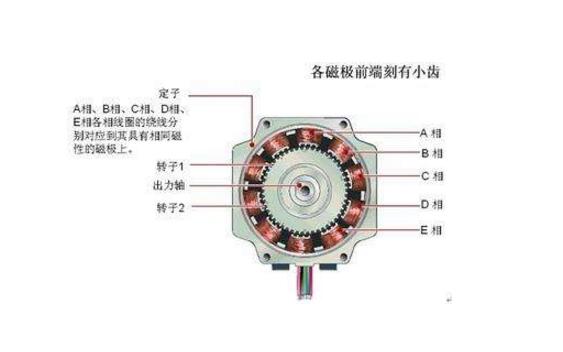
步進電機是利用電磁場的相互作用,使得電機轉子按照一定的規律運動的。它的構造主要包括定子、轉子和傳感器等部分。步進電機通常有兩相、三相、五相等多個相,不同的相數對應不同的工作模式,其中兩相步進電機是最基本的類型。
兩相步進電機通常由兩個繞組構成,每個繞組都被連接到控制器的一個輸出端口。每個繞組固定在電機的兩個相鄰極處,電壓信號通過繞組引腳輸入,施加在相應的線圈上。當電流通過繞組時,將產生一個磁場,與固定在定子上的永磁體相互作用,從而產生轉矩,使轉子產生角位移。
在兩相步進電機中,通過改變兩個繞組的電流方向和大小,可以實現對電機的控制。最常見的控制方式有全步進和半步進兩種。
- 全步進控制
全步進控制是通過對兩個繞組施加相同與相反的電流來控制電機的轉動。當兩個繞組中只有一個通電時,電機會按照固定的角度旋轉;當兩個繞組中有一個反向通電時,電機會向相反方向旋轉。通過交替供電或斷電,可以使得電機按照一定的角度順時針或逆時針旋轉。 - 半步進控制
半步進控制是通過對兩個繞組施加不同大小和方向的電流來控制電機的轉動。在半步進模式下,通過改變電流的大小和方向,可以讓電機以更小的步長旋轉。例如,當第一個繞組通電時,電機會按照固定的角度旋轉;當第一個繞組斷電、第二個繞組通電時,電機會向相反方向再轉一定的角度。通過交替供電和斷電,可以實現更精確的控制。
步進電機最簡單的驅動方法
步進電機最簡單的驅動方法是開關驅動法。這種方法通過微控制器或驅動器的輸出信號來控制電機的旋轉。具體步驟如下:
- 確定繞組的正負極性:根據電機的接線情況,確定每個繞組的正負極性,通常通過電機的數據手冊或標簽來確定。
- 連接繞組和驅動器:將電機的每個繞組連接到驅動器的一個輸出端口。根據繞組的正負極性,將繞組引腳與相應的輸出端口相連。
- 設置控制信號:通過程序編程或開關設置,將控制信號輸出到驅動器的輸入端口。根據電機的控制模式(全步進或半步進),設置驅動器的輸入信號。
- 控制電機運動:當控制信號到達驅動器后,驅動器將根據信號的大小和頻率來控制電機的旋轉。通過改變信號的輸入,可以改變電機的速度和方向。
開關驅動法是最簡單且常用的步進電機驅動方法。它使用普通開關或微控制器輸出信號來控制電機的旋轉,控制簡單,但精度和分辨率較低。在實際應用中,通常會使用更復雜的驅動器和控制方式來實現更精確的步進電機控制。
總結
步進電機是一種將電脈沖信號轉換為角位移的電動機。它的工作原理是通過電流產生的磁場與固定在定子上的永磁體相互作用,從而產生轉矩,驅動電機旋轉。步進電機最簡單的驅動方法是開關驅動法,通過開關信號來控制電機的旋轉方向和速度。這種方法簡單易行,但精度和分辨率較低,通常在一些簡單的應用中使用。在實際應用中,可以根據需求選擇更復雜的驅動方法和控制器,以實現更精確的步進電機控制。
-
控制器
+關注
關注
112文章
15873瀏覽量
175303 -
電動機
+關注
關注
73文章
4036瀏覽量
95242 -
步進電機
+關注
關注
150文章
3040瀏覽量
146835 -
脈沖信號
+關注
關注
6文章
375瀏覽量
36767
發布評論請先 登錄
相關推薦








 工商網監
工商網監
評論