") 步進(jìn)電機(jī)的微步驅(qū)動原理是什么
步進(jìn)電機(jī)的微步驅(qū)動原理是什么
微步驅(qū)動(Microstepping)是一種細(xì)分步進(jìn)電機(jī)步距的技術(shù),允許電機(jī)以比全步進(jìn)更小的增量進(jìn)行旋轉(zhuǎn)。這種技術(shù)利用了電流控制,以產(chǎn)生介于兩個全步位置之間的中間磁場狀態(tài)。結(jié)果是,電機(jī)可以更平滑地移動,并能夠?qū)崿F(xiàn)更精確的定位。
微步驅(qū)動原理的核心在于對繞組電流的精細(xì)控制。在傳統(tǒng)的步進(jìn)電機(jī)操作中,繞組通常被全開或全關(guān),對應(yīng)于一個特定的極性方向,從而產(chǎn)生足夠的力矩使電機(jī)轉(zhuǎn)到下一個步距角。然而,在微步驅(qū)動模式下,控制器會將電流分成多個級別(或“微步”),而不是全開或全關(guān)。
步進(jìn)電機(jī)的微步驅(qū)動技術(shù)主要帶來兩個顯著的優(yōu)勢:其一,它能夠?qū)崿F(xiàn)極精細(xì)的角度控制;其二,它有助于減少在低速運行時的振動與噪聲。當(dāng)步進(jìn)電機(jī)完成一步移動時,通常會發(fā)生阻尼振動,并在多次超調(diào)和欠調(diào)之后最終穩(wěn)定在預(yù)定位置。特別是在低速情況下,這種阻尼振動可能更為明顯,導(dǎo)致不必要的振動和噪聲問題。通過減小步距角,可以有效抑制這種阻尼振動。而微步驅(qū)動正通過細(xì)分步進(jìn)角度來實現(xiàn)這一目標(biāo),從而在低速運動時顯著降低振動和噪聲水平。
以下是微步驅(qū)動技術(shù)的詳細(xì)解釋:
1. 電流細(xì)分:微步驅(qū)動器將電機(jī)繞組的最大電流劃分為多個級別。例如,如果驅(qū)動器支持16個微步,則意味著電流有16個不同的級別,從0%到100%。
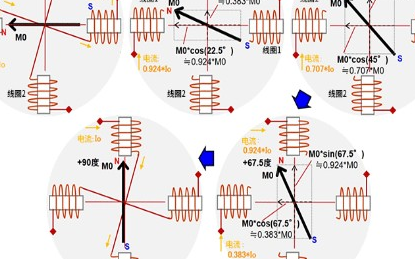
2. 磁場控制:通過調(diào)節(jié)電流,微步驅(qū)動器可以控制電機(jī)內(nèi)磁場的大小和方向。這允許轉(zhuǎn)子在每個全步距之間進(jìn)行更細(xì)小的調(diào)整。
3. 平滑運動:由于轉(zhuǎn)子移動的每一步都變小了,因此整體運動變得更加平滑,振動和噪音也相應(yīng)減少。
4. 增強(qiáng)分辨率:微步進(jìn)技術(shù)提高了系統(tǒng)的分辨率。例如,如果一個步進(jìn)電機(jī)的物理步距角是1.8度,使用16個微步,它的分辨率就可以提高到0.1125度(1.8度 / 16)。
5. 力矩波動:在全步進(jìn)模式下,轉(zhuǎn)矩會在每一步有一個較大的波動。微步進(jìn)可以使轉(zhuǎn)矩波動減小,因為磁場和轉(zhuǎn)子位置的變化更加連續(xù)和均勻。
總結(jié)來說,微步驅(qū)動是一種先進(jìn)的步進(jìn)電機(jī)控制技術(shù),它通過在電機(jī)繞組中實施精確的電流控制來細(xì)分步距。這項技術(shù)不僅提高了步進(jìn)電機(jī)的運動平滑度和定位精度,還降低了噪音和振動,且有助于更好地管理電機(jī)熱量。盡管微步驅(qū)動器增加了系統(tǒng)的復(fù)雜度和成本,但它們在高精度和高性能的應(yīng)用中提供了顯著的優(yōu)勢。
-
電動機(jī)
+關(guān)注
關(guān)注
73文章
4041瀏覽量
95261 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
150文章
3042瀏覽量
146855 -
微步驅(qū)動
+關(guān)注
關(guān)注
0文章
2瀏覽量
5667
發(fā)布評論請先 登錄
相關(guān)推薦
微步控制步進(jìn)電機(jī)驅(qū)動NSD8381調(diào)試指南

TB6600HG/TB6600HQ步進(jìn)電機(jī)驅(qū)動芯片
如何避免步進(jìn)電機(jī)失步
PWM實現(xiàn)儀表步進(jìn)電機(jī)的微步細(xì)分驅(qū)動相關(guān)資料下載
基于FPGA的新型步進(jìn)電機(jī)驅(qū)動系統(tǒng)
LT2221步進(jìn)電機(jī)驅(qū)動電路
步進(jìn)電機(jī)微步驅(qū)動的工作原理
用PWM實現(xiàn)儀表步進(jìn)電機(jī)的微步細(xì)分驅(qū)動

如何測試TB6600步進(jìn)電機(jī)驅(qū)動器控制器和步進(jìn)電機(jī)
步進(jìn)電機(jī)微步驅(qū)動的工作原理
STM32驅(qū)動28BYJ-48步進(jìn)電機(jī)
步進(jìn)電機(jī)按步驅(qū)動





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論