 人形機器人:3大核心傳感器技術壁壘及市場規模分析(1.3萬字)
人形機器人:3大核心傳感器技術壁壘及市場規模分析(1.3萬字)
傳感器為人形機器人感知層核心零部件,人形機器人對傳感器需求較大,成本占比較高,本文將對六維力矩傳感器、電子皮膚、MEMS傳感器這幾類傳感器進行市場分析:
1
傳感器:全球市場空間分析
1.1. 傳感器分類眾多,壓力傳感器占比較大 傳感器是自動化檢測技術和智能控制系統的重要部件。傳感器是能夠把特定的信息(物理、化學、生物)按一定規律轉換成某種可用信號輸出的器件和裝置。廣義上的傳感器一般由信號檢出器件與信號處理器件兩部分組成,從而轉化感知到的模擬信號并使之以電信號的形式顯示。傳感器一般由敏感元件、轉換元件和基本電路組成。敏感元件感受被測量的狀態,轉換元件將相應的被測量轉換成電參量,而基本電路將電參量接入電路并轉換成電量。傳感器的核心部分是轉換元件,其決定了傳感器的工作原理。 傳感器分類較多,壓力傳感器占比最大。傳感器可按檢測對象分為物理 量、化學量以及生物量傳感器,下含力學量傳感器、熱學量傳感器、光學量傳感器、溫度傳感器、生物量傳感器等共 11 個小類。檢測對象的信號形式決定了選用傳感器的類型,在機械自動化與工業過程控制中,常見的信號形式包括位移、(加)速度、扭矩、力、振動、溫度、濕度等。目前我國壓力傳感器和圖像傳感器占比穩步提升,2021 年分別占比 17.9% 和 10.3%,是目前國內占比最高的兩種傳感器。 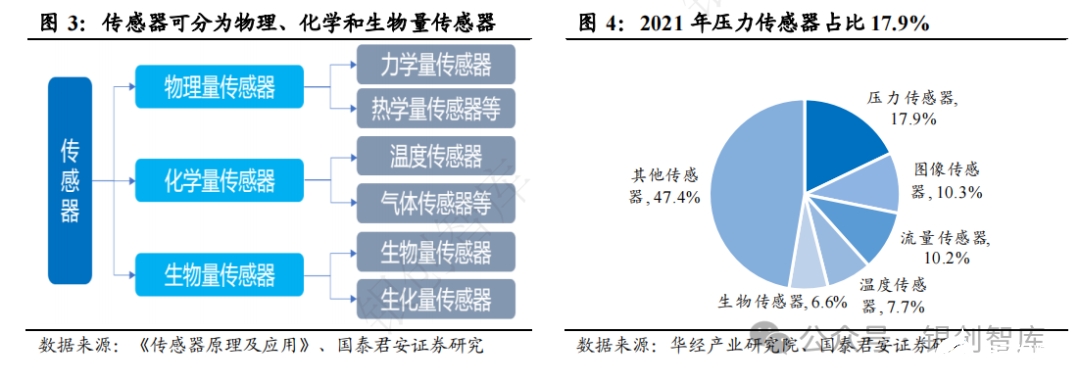 ? 1.2. 傳感器下游應用廣泛,市場空間廣闊 傳感器產品下游應用廣泛,人形機器人對傳感器依賴程度高。據 CCID 數據,我國傳感器產品最大下游領域為汽車電子,占比達到 24.2%,其次為工業制造領域,占比為 21.1%,位列三到五名的下游行業為網絡通信、消費電子和醫療電子,占比分別為 21.0%、14.7%、7.2%。為模擬人類感知,人形機器人需要裝載一套復雜的傳感器系統,包含內部傳感器和外部傳感器。一臺能完全模擬人類的機器人身體上會用到大量傳感器, 用于提供視覺、聽覺、觸覺、位置等信息。
? 1.2. 傳感器下游應用廣泛,市場空間廣闊 傳感器產品下游應用廣泛,人形機器人對傳感器依賴程度高。據 CCID 數據,我國傳感器產品最大下游領域為汽車電子,占比達到 24.2%,其次為工業制造領域,占比為 21.1%,位列三到五名的下游行業為網絡通信、消費電子和醫療電子,占比分別為 21.0%、14.7%、7.2%。為模擬人類感知,人形機器人需要裝載一套復雜的傳感器系統,包含內部傳感器和外部傳感器。一臺能完全模擬人類的機器人身體上會用到大量傳感器, 用于提供視覺、聽覺、觸覺、位置等信息。 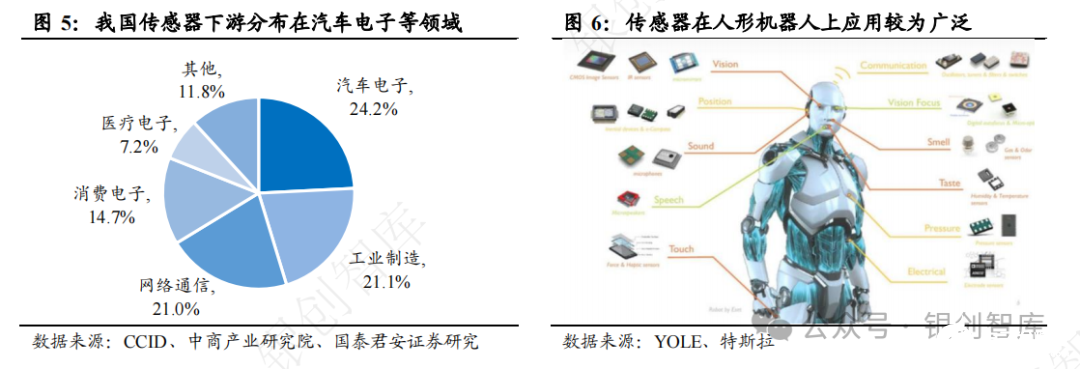 ? 全球傳感器市場空間較為廣闊。隨著工業 4.0、工業物聯網進程的推進以 及智慧駕駛、智能穿戴設備等新興產業的發展,傳感器市場持續擴容。據 Precedence Research 數據,2022 年全球傳感器市場規模達 2048.0 億 美元,且隨著工業自動化等領域的需求不斷增長,未來十年內傳感器市 場將延續增長態勢,2032 年或將達到 5086.4 億美元。
? 全球傳感器市場空間較為廣闊。隨著工業 4.0、工業物聯網進程的推進以 及智慧駕駛、智能穿戴設備等新興產業的發展,傳感器市場持續擴容。據 Precedence Research 數據,2022 年全球傳感器市場規模達 2048.0 億 美元,且隨著工業自動化等領域的需求不斷增長,未來十年內傳感器市 場將延續增長態勢,2032 年或將達到 5086.4 億美元。  ? 我國傳感器市場規模不斷擴大,未來有望延續較高增速。隨著工業轉型升級的歷程不斷推進,我國傳感器市場規模近年來實現顯著增長。據中商產業研究院數據,傳感器市場規模行業已由 2019 年的 2188.8 億元上 漲至 2022 年的 3096.9 億元,期間 CAGR 為 12.26%,預計 2024 年可達 到 3732.7 億元。據 Mordor Intelligence 數據,在汽車工業、國防工業等行業發展推動及“中國制造 2025”政策目標激勵下,我國傳感器市場規模有望實現高速增長,2023-2028 年間的 CAGR 預計將達 9.1%。
? 我國傳感器市場規模不斷擴大,未來有望延續較高增速。隨著工業轉型升級的歷程不斷推進,我國傳感器市場規模近年來實現顯著增長。據中商產業研究院數據,傳感器市場規模行業已由 2019 年的 2188.8 億元上 漲至 2022 年的 3096.9 億元,期間 CAGR 為 12.26%,預計 2024 年可達 到 3732.7 億元。據 Mordor Intelligence 數據,在汽車工業、國防工業等行業發展推動及“中國制造 2025”政策目標激勵下,我國傳感器市場規模有望實現高速增長,2023-2028 年間的 CAGR 預計將達 9.1%。 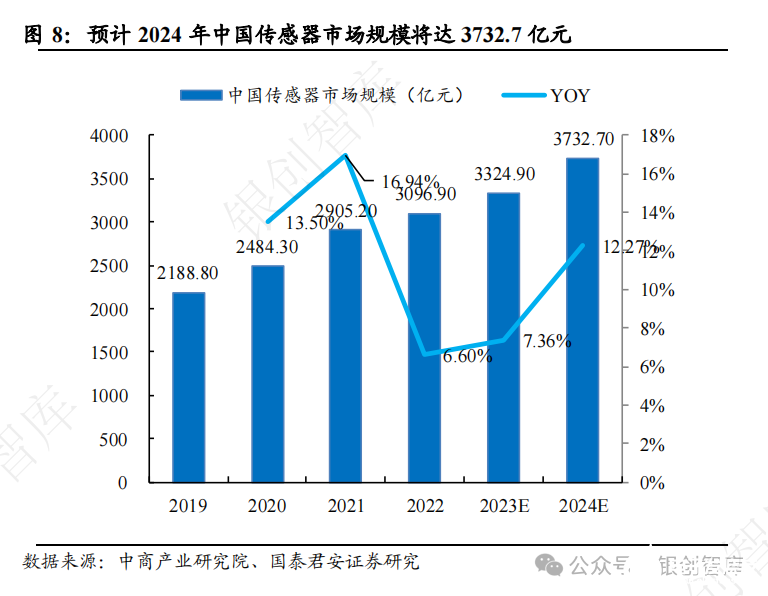 ? 我國傳感器高端市場仍被外資品牌主導,但國產化率有明顯提升趨勢。2020 年全球龍頭企業如愛默生、西門子、博世、意法半導體、霍尼韋爾等跨國公司占據絕大部分國內市場份額,高端市場傳感器芯片仍依賴海外企業,而國內頭部企業產品主要集中在中低端,未形成大批量應用。從國產化率來看,國內智能傳感器國產化率由2016年的13%增長至2020 年的 31%,CAGR 達 24%,預計未來國產化率有望進一步提升。
? 我國傳感器高端市場仍被外資品牌主導,但國產化率有明顯提升趨勢。2020 年全球龍頭企業如愛默生、西門子、博世、意法半導體、霍尼韋爾等跨國公司占據絕大部分國內市場份額,高端市場傳感器芯片仍依賴海外企業,而國內頭部企業產品主要集中在中低端,未形成大批量應用。從國產化率來看,國內智能傳感器國產化率由2016年的13%增長至2020 年的 31%,CAGR 達 24%,預計未來國產化率有望進一步提升。 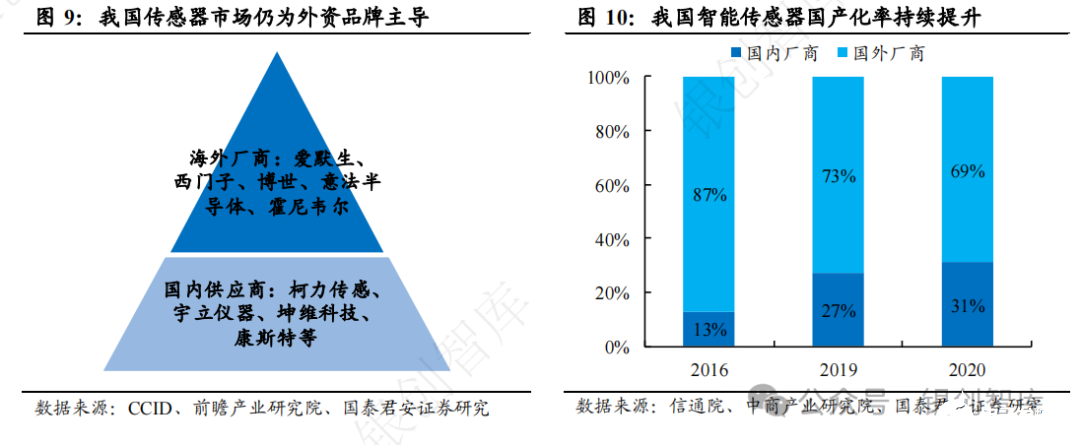 ? 1.3. 政策東風頻吹,助力市場擴容 我國傳感器行業政策支持力度持續加大。傳感器作為工業控制系統、汽車電子等產品的核心關鍵部件之一,是實現工業轉型升級的重要組成部分,在物聯網、人工智能等各方面都有廣泛應用。近年來國家相繼推出 一系列產業支持政策,有力推動了傳感器行業的發展。
? 1.3. 政策東風頻吹,助力市場擴容 我國傳感器行業政策支持力度持續加大。傳感器作為工業控制系統、汽車電子等產品的核心關鍵部件之一,是實現工業轉型升級的重要組成部分,在物聯網、人工智能等各方面都有廣泛應用。近年來國家相繼推出 一系列產業支持政策,有力推動了傳感器行業的發展。 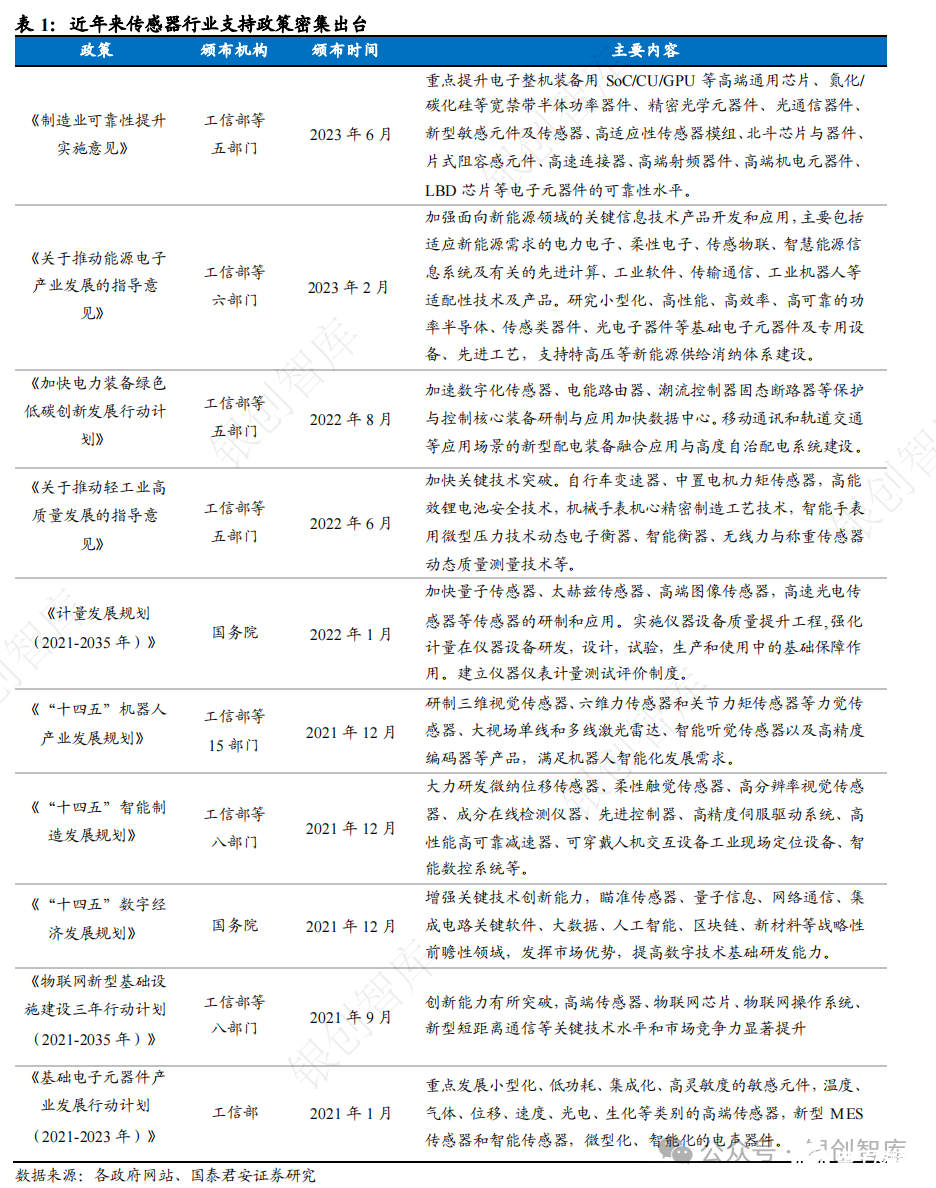
2
力傳感器
2.1. 力/力矩傳感器可精確測量力的大小 力傳感器是將力的值轉換成電信號的元件。重量、拉力、應力、扭矩均 能夠作為力傳感器的輸入量,經處理后輸出為電信號,并將其傳遞至指 示器、控制器或計算機等終端。與廣義傳感器類似,力傳感器由力敏元 件(即彈性體,常見的材料有鋁合金,合金鋼和不銹鋼)、轉換元件(最 為常見的是電阻應變片)和電路部分(一般有漆包線,pcb 板等)組成, 其中力敏電阻器是廣泛運用的力敏元件。力敏電阻器通常包含導電聚合 物薄膜(由亞微米尺寸的導電及非導電顆粒基質組成),其表面受力時 接觸傳感器電極,并以可預測的方式改變本身電阻,從而衡量受力數值。 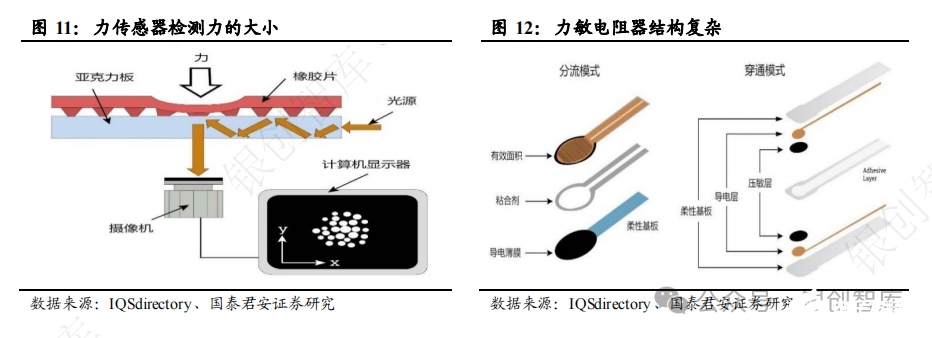 ? 力矩傳感器屬于力傳感器,力矩傳感器使用應變計測量物體所受到的力矩。力矩是表示力對物體作用時所產生的轉動效應的物理量,是傳感器常見的力學輸入量。按照是否涉及加速度,力矩又可分為靜態力矩(不涉及加速度)和動態力矩(涉及加速度),靜態力矩通常為未產生旋轉的力矩,而動態力矩通常為產生旋轉的力矩。兩種典型的力矩傳感器設計是測量軸和測量法蘭,均呈現軸體結構。力矩傳感器通常裝載有應變 片,其由薄箔和連接到箔的電導體組成。當箔片以及導體形狀發生變化時,電阻也會發生變化,從而揭示作用在應變片上的負載。如果外部負載作用于傳感器,應變計會像彈簧元件一樣產生形變,進而實現測量功能。
? 力矩傳感器屬于力傳感器,力矩傳感器使用應變計測量物體所受到的力矩。力矩是表示力對物體作用時所產生的轉動效應的物理量,是傳感器常見的力學輸入量。按照是否涉及加速度,力矩又可分為靜態力矩(不涉及加速度)和動態力矩(涉及加速度),靜態力矩通常為未產生旋轉的力矩,而動態力矩通常為產生旋轉的力矩。兩種典型的力矩傳感器設計是測量軸和測量法蘭,均呈現軸體結構。力矩傳感器通常裝載有應變 片,其由薄箔和連接到箔的電導體組成。當箔片以及導體形狀發生變化時,電阻也會發生變化,從而揭示作用在應變片上的負載。如果外部負載作用于傳感器,應變計會像彈簧元件一樣產生形變,進而實現測量功能。 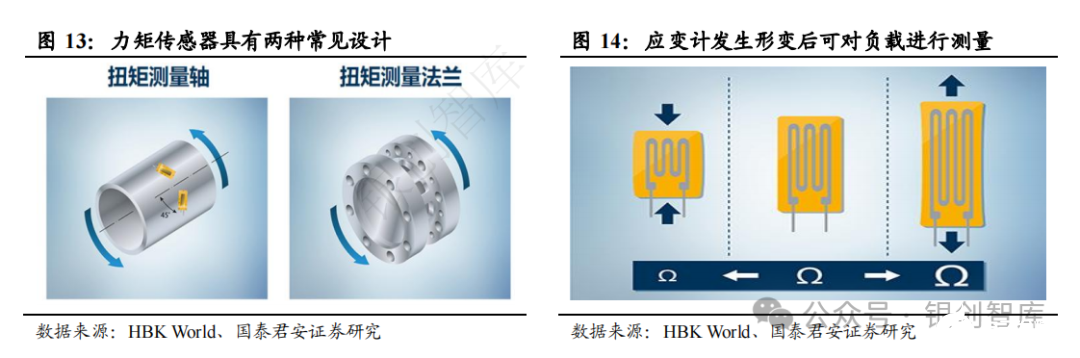 ? 根據壓力原件的不同,可以將力傳感器可分為應變式力傳感器、光學式傳感器以及壓電式力傳感器等,其中壓電式轉換元件多應用在非六維力傳感器中。 1)應變式力傳感器:采用的是硅應變片或金屬箔,壓電式傳感器可分為電容和壓電兩種,其原理都是轉換元件應變片隨力敏元件同時發生形變, 導致自身電阻值、電壓差、光柵變化,通過電信號反應力和力矩的改變。硅應變片能夠保持高剛度、穩定性和信噪比,具有最優的性能水平,缺點則是成本較高、制作工藝復雜;
? 根據壓力原件的不同,可以將力傳感器可分為應變式力傳感器、光學式傳感器以及壓電式力傳感器等,其中壓電式轉換元件多應用在非六維力傳感器中。 1)應變式力傳感器:采用的是硅應變片或金屬箔,壓電式傳感器可分為電容和壓電兩種,其原理都是轉換元件應變片隨力敏元件同時發生形變, 導致自身電阻值、電壓差、光柵變化,通過電信號反應力和力矩的改變。硅應變片能夠保持高剛度、穩定性和信噪比,具有最優的性能水平,缺點則是成本較高、制作工藝復雜;
2)光學式元件:測量范圍較廣、抗電磁干擾能力強,但缺點是剛性偏弱, 并且對環境的要求較高; 3)壓電/電容式元件:擁有高靈敏度和高分辨率,并且環境適用性較強, 但缺點是電路復雜,信號漂移難以抑制。 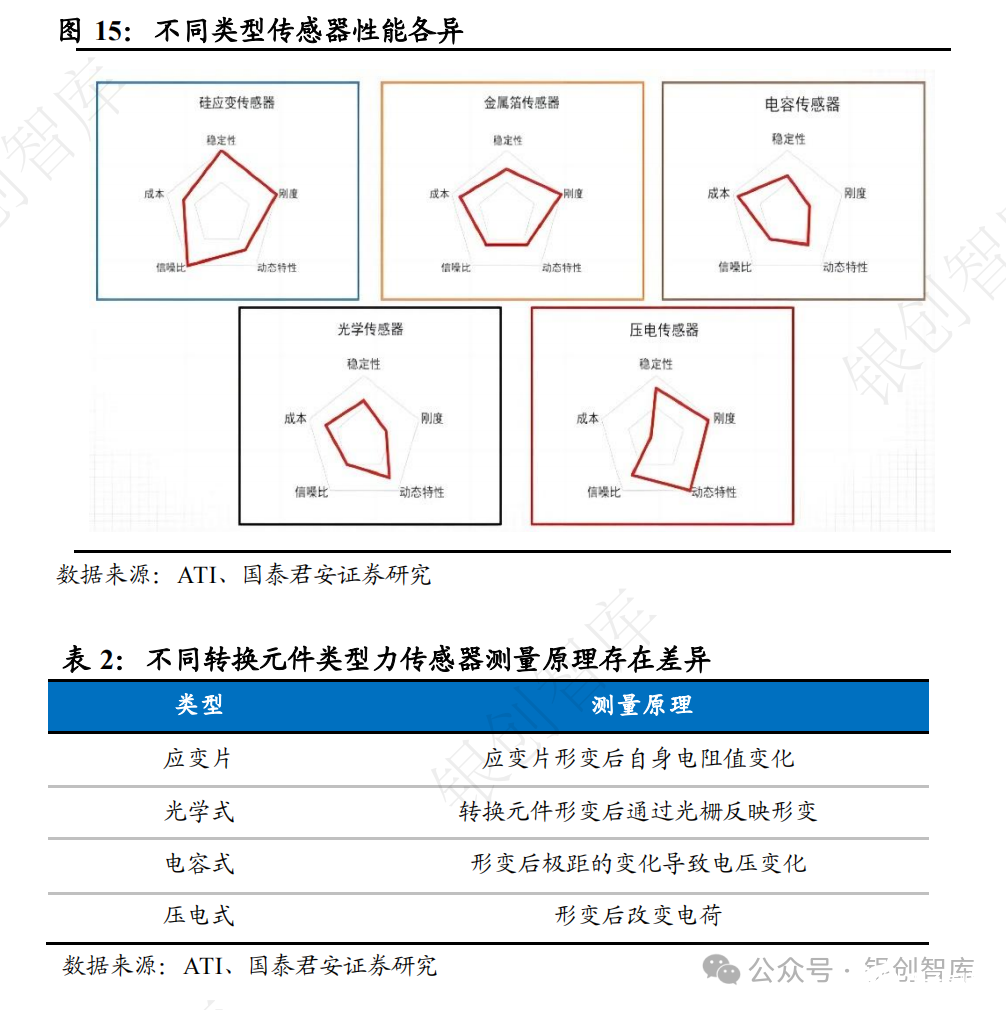 ? 2.2. 六維力矩傳感器為力控最優方案,技術壁壘高筑 按測量方向分類,六維力矩傳感器是其中性能最優、力覺信息最全面的力矩傳感器。在指定的直角坐標系內,六維力矩傳感器能夠同時測量沿三個坐標軸方向的力(F、FY、FZ)和繞三個坐標軸方向的力矩(MX、 MY、MZ)。六軸力傳感器一般分成固定端(機器人端)和加載端(工具端)。兩端相對受力時,傳感器發生彈性變形,傳感器內部的應變計 電阻發生變化,進而轉換成電壓信號輸出。
? 2.2. 六維力矩傳感器為力控最優方案,技術壁壘高筑 按測量方向分類,六維力矩傳感器是其中性能最優、力覺信息最全面的力矩傳感器。在指定的直角坐標系內,六維力矩傳感器能夠同時測量沿三個坐標軸方向的力(F、FY、FZ)和繞三個坐標軸方向的力矩(MX、 MY、MZ)。六軸力傳感器一般分成固定端(機器人端)和加載端(工具端)。兩端相對受力時,傳感器發生彈性變形,傳感器內部的應變計 電阻發生變化,進而轉換成電壓信號輸出。 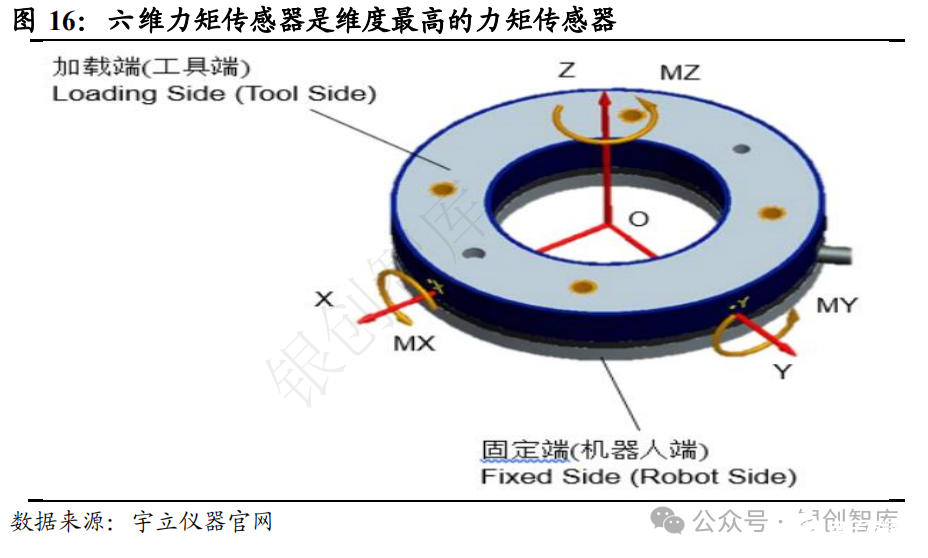 ? 在精確測量的要求下,六維力矩傳感器是最佳選擇。若如果力的方向和 作用點固定,則可選用一維力傳感器;若力的方向隨機變化,但作用點 保持不變且與傳感器的標定參考點重合,則可選用三維力傳感器;若力 的方向和作用點都在三維空間內隨機變化,則應選用六維力傳感器進行 測量。高精度的六維力矩傳感器能夠解耦各方向力和力矩間的干擾,使 力的測量更為精準,并能利用力矩信息來推算獲取受力部件的姿態,監 測力矩是否在安全范圍內,有效避免傳感器的過載損壞。
? 在精確測量的要求下,六維力矩傳感器是最佳選擇。若如果力的方向和 作用點固定,則可選用一維力傳感器;若力的方向隨機變化,但作用點 保持不變且與傳感器的標定參考點重合,則可選用三維力傳感器;若力 的方向和作用點都在三維空間內隨機變化,則應選用六維力傳感器進行 測量。高精度的六維力矩傳感器能夠解耦各方向力和力矩間的干擾,使 力的測量更為精準,并能利用力矩信息來推算獲取受力部件的姿態,監 測力矩是否在安全范圍內,有效避免傳感器的過載損壞。 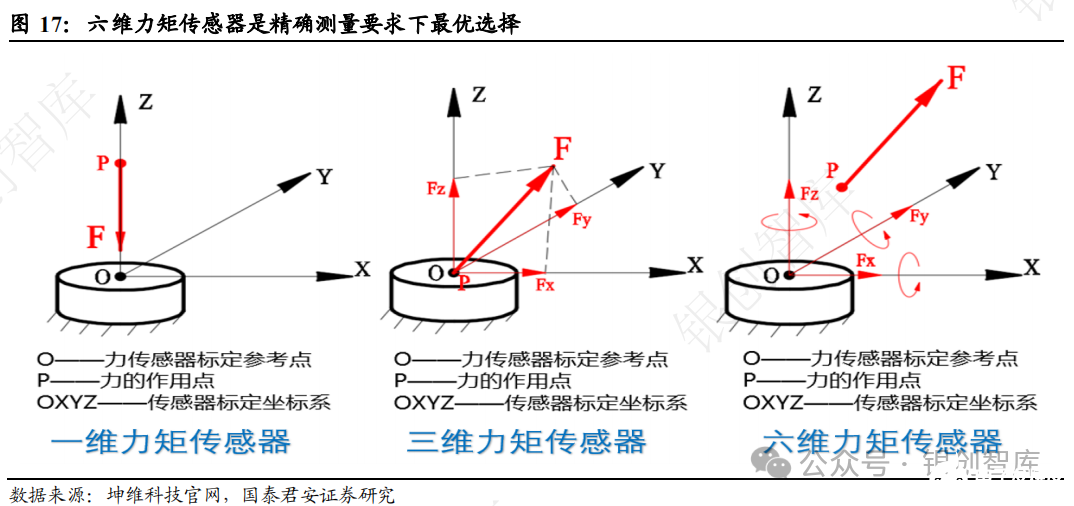 ? 力傳感器應用廣泛,人形機器人配置較多。力傳感器廣泛應用于工業、 航空航天、汽車、醫療設備等領域。在機器人領域,力傳感器可用于實時測量機器人關節所受到的力,并實現主動力輸出控制,在高復雜度工作、協調作業等場景扮演重要角色。機器人中的力傳感器主要有關節部位的單軸力矩傳感器和機器人執行器末端的六軸力傳感器,測量機器人內部受力情況,以及末端執行器與外界環境交互的受力情況。六維力矩傳感器具有多元的工業應用場景,主要包含打磨、精密裝配、醫療、特種作業、測試等涉及接觸操作、需要多維力感知的場景,其中機器人領域的應用較多,是六維力/力矩傳感器的核心應用領域。
? 力傳感器應用廣泛,人形機器人配置較多。力傳感器廣泛應用于工業、 航空航天、汽車、醫療設備等領域。在機器人領域,力傳感器可用于實時測量機器人關節所受到的力,并實現主動力輸出控制,在高復雜度工作、協調作業等場景扮演重要角色。機器人中的力傳感器主要有關節部位的單軸力矩傳感器和機器人執行器末端的六軸力傳感器,測量機器人內部受力情況,以及末端執行器與外界環境交互的受力情況。六維力矩傳感器具有多元的工業應用場景,主要包含打磨、精密裝配、醫療、特種作業、測試等涉及接觸操作、需要多維力感知的場景,其中機器人領域的應用較多,是六維力/力矩傳感器的核心應用領域。  ? 機器人運動的高精度控制對六維力矩傳感器帶來需求。協同機器人末端關節上的六維力傳感器通常還需要與研磨頭、夾爪等執行器相連,執行器工作過程中的力臂從數十毫米到三百毫米不等,力臂較大且隨機變化, 所以通常采用六維力傳感器實現高精度控制。在人形機器人中,通常將力/力矩傳感器安裝在腳掌與踝關節之間和機械手與腕關節之間,以提供更加全面的力覺感知。
? 機器人運動的高精度控制對六維力矩傳感器帶來需求。協同機器人末端關節上的六維力傳感器通常還需要與研磨頭、夾爪等執行器相連,執行器工作過程中的力臂從數十毫米到三百毫米不等,力臂較大且隨機變化, 所以通常采用六維力傳感器實現高精度控制。在人形機器人中,通常將力/力矩傳感器安裝在腳掌與踝關節之間和機械手與腕關節之間,以提供更加全面的力覺感知。 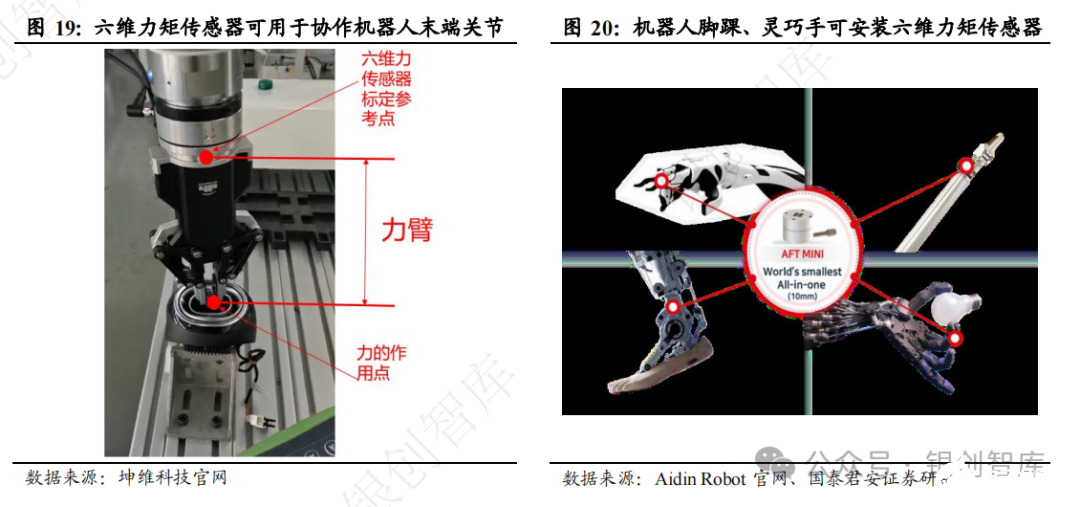 ? 多維力傳感器小型化是未來重要發展趨勢。為兼顧多維力傳感器的小型化和高性能,目前能夠采取的主要途徑是選用小尺寸(或體積)的敏感 元件,從而縮小傳感器結構尺寸。基于壓阻效應的敏感元件(如硅應變 計等)多采用半導體材料和加工工藝,在體積、性能和成本等方面具有 顯著優勢,已成為實現多維力傳感器小型化的重要技術途徑之一。將半導體硅應變計應用于實現多維力傳感器的小型化涉及特定技術問題:硅應變計設計與其貼片工藝需滿足多維力傳感器的設計使用要求。 目前主流商業化壓力傳感器多采用(集成式)硅應變計。國內傳統硅應變計的制造工藝一般是在 P 型硅片襯底上采用擴散法或離子注入法摻雜 N 型雜質形成壓敏電阻,并通過光刻、腐蝕、引線鍵合等工藝形成應變計,但易造成應變計批次間較大的阻值差異。多維力傳感器采用的應變計較多,對一致性有的更高需求,較差的一致性則會導致不同橋路(分量力)的零點輸出差異較大,不利于其后續的溫度及解耦信號處理與補償,并阻礙傳感器的批量生產。對于貼片工藝,傳統力傳感器通常使用 有機粘接劑(硅膠、環氧等)將金屬(或半導體)應變計粘接在傳感器彈性元件上,是目前最常見的傳感器貼片材料。 六維力矩傳感器技術壁壘極高,涵蓋多個方面。六維力傳感器除了形態多,研發難度也較大,其非線性力學特征明顯,要考慮多通道信號的溫漂、蠕變、交叉干擾、數據處理的實時性、加載標定的復雜性等,技術壁壘主要在結構解耦設計、解耦算法、標定與校準等方面。
? 多維力傳感器小型化是未來重要發展趨勢。為兼顧多維力傳感器的小型化和高性能,目前能夠采取的主要途徑是選用小尺寸(或體積)的敏感 元件,從而縮小傳感器結構尺寸。基于壓阻效應的敏感元件(如硅應變 計等)多采用半導體材料和加工工藝,在體積、性能和成本等方面具有 顯著優勢,已成為實現多維力傳感器小型化的重要技術途徑之一。將半導體硅應變計應用于實現多維力傳感器的小型化涉及特定技術問題:硅應變計設計與其貼片工藝需滿足多維力傳感器的設計使用要求。 目前主流商業化壓力傳感器多采用(集成式)硅應變計。國內傳統硅應變計的制造工藝一般是在 P 型硅片襯底上采用擴散法或離子注入法摻雜 N 型雜質形成壓敏電阻,并通過光刻、腐蝕、引線鍵合等工藝形成應變計,但易造成應變計批次間較大的阻值差異。多維力傳感器采用的應變計較多,對一致性有的更高需求,較差的一致性則會導致不同橋路(分量力)的零點輸出差異較大,不利于其后續的溫度及解耦信號處理與補償,并阻礙傳感器的批量生產。對于貼片工藝,傳統力傳感器通常使用 有機粘接劑(硅膠、環氧等)將金屬(或半導體)應變計粘接在傳感器彈性元件上,是目前最常見的傳感器貼片材料。 六維力矩傳感器技術壁壘極高,涵蓋多個方面。六維力傳感器除了形態多,研發難度也較大,其非線性力學特征明顯,要考慮多通道信號的溫漂、蠕變、交叉干擾、數據處理的實時性、加載標定的復雜性等,技術壁壘主要在結構解耦設計、解耦算法、標定與校準等方面。 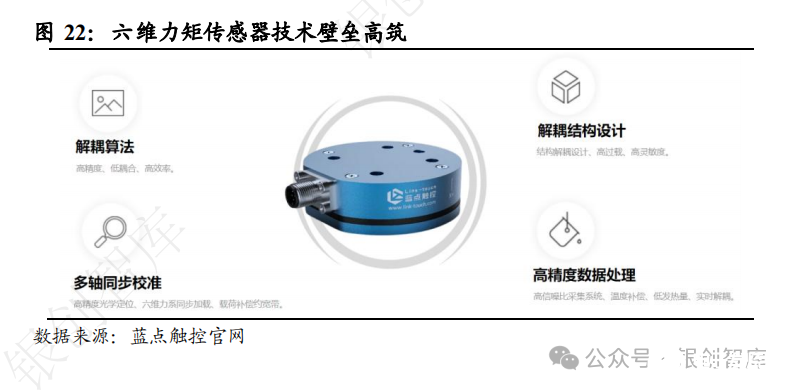 ? 結構解耦設計為重要壁壘。力敏感元件的形式和布置直接影響傳感器的靈敏度、剛度、動態性能、維間耦合等,很大程度上決定傳感器性能的優劣。常見的結構設計包括豎梁、橫梁等一體化結構以及 Stewart 并聯平臺。豎梁結構橫向效應好、結構簡單、承載能力強,但豎向效應差、維間干擾大、靈敏度較低;十字橫梁結構靈敏度高、易加工,易于標定,但存在維間耦合和徑向效應;Stewart 平臺中彈性體采用復合式結構,該 類傳感器具有結構緊湊、承載能力強、誤差不累積等優點。貼片位置調整和電橋組橋設計進一步消除耦合。特殊的結構設計能夠大大地降低力敏元件的耦合變形,但其結構上的連續性導致結構耦合變形沒有辦法完全避免,因此還需要通過貼片和組橋來進一步消除耦合貼片。
? 結構解耦設計為重要壁壘。力敏感元件的形式和布置直接影響傳感器的靈敏度、剛度、動態性能、維間耦合等,很大程度上決定傳感器性能的優劣。常見的結構設計包括豎梁、橫梁等一體化結構以及 Stewart 并聯平臺。豎梁結構橫向效應好、結構簡單、承載能力強,但豎向效應差、維間干擾大、靈敏度較低;十字橫梁結構靈敏度高、易加工,易于標定,但存在維間耦合和徑向效應;Stewart 平臺中彈性體采用復合式結構,該 類傳感器具有結構緊湊、承載能力強、誤差不累積等優點。貼片位置調整和電橋組橋設計進一步消除耦合。特殊的結構設計能夠大大地降低力敏元件的耦合變形,但其結構上的連續性導致結構耦合變形沒有辦法完全避免,因此還需要通過貼片和組橋來進一步消除耦合貼片。 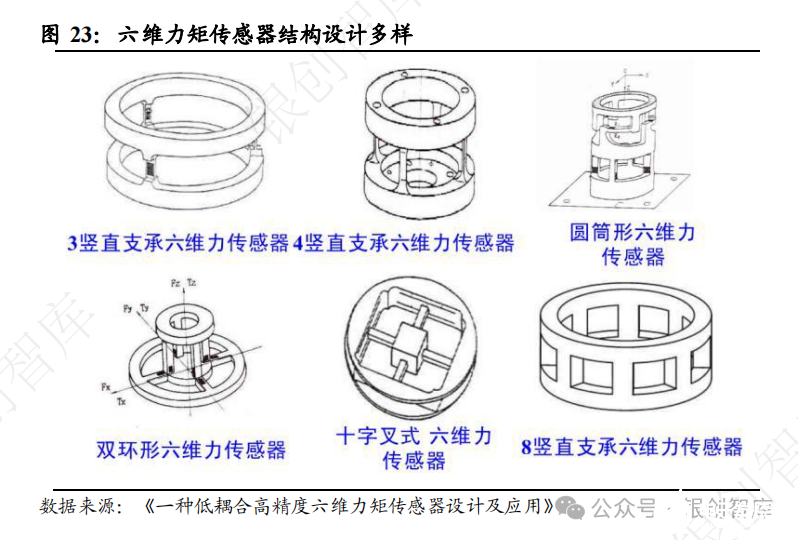 ? 解耦算法,會解耦各方向力和力矩間的干擾,使力的測量更為精準。六分力傳感器中六個通道中的每一個通道中的輸入信號都會對其他通道 的輸出信號造成影響,解耦就是要在一定程度上減小或消除耦合干擾。一般消除耦合或者抑制耦合可以從兩個方向來做,第一種是在生產傳感器之前進行的工作,一般叫做結構解耦,即從傳感器的設計上來消除或 者抑制耦合;第二種則是利用系統性的數學模型,要矩陣解耦,運用數 字信號處理的方法來減少或者消除傳感器的維間耦合該方法對制作工 藝要求比較低,比較容易達到,且還能取得很好的效果。 標定與檢測可校準傳感器精度。通過加載理論值的載荷并同時記錄傳感器輸出的對應原始信號的方式,建立傳感器原始信號和受力之間的映射關系,獲得解耦算法的數學模型和參數。在完成標定以后,通過加載已知理論真值的載荷并同時記錄傳感器測量結果的方式進行檢測,統計、 比較測量結果和理論真值的差異,獲得傳感器的精度和準。簡單說,標 定是獲得傳感器固件參數,檢測是獲得傳感器的精準度。
? 解耦算法,會解耦各方向力和力矩間的干擾,使力的測量更為精準。六分力傳感器中六個通道中的每一個通道中的輸入信號都會對其他通道 的輸出信號造成影響,解耦就是要在一定程度上減小或消除耦合干擾。一般消除耦合或者抑制耦合可以從兩個方向來做,第一種是在生產傳感器之前進行的工作,一般叫做結構解耦,即從傳感器的設計上來消除或 者抑制耦合;第二種則是利用系統性的數學模型,要矩陣解耦,運用數 字信號處理的方法來減少或者消除傳感器的維間耦合該方法對制作工 藝要求比較低,比較容易達到,且還能取得很好的效果。 標定與檢測可校準傳感器精度。通過加載理論值的載荷并同時記錄傳感器輸出的對應原始信號的方式,建立傳感器原始信號和受力之間的映射關系,獲得解耦算法的數學模型和參數。在完成標定以后,通過加載已知理論真值的載荷并同時記錄傳感器測量結果的方式進行檢測,統計、 比較測量結果和理論真值的差異,獲得傳感器的精度和準。簡單說,標 定是獲得傳感器固件參數,檢測是獲得傳感器的精準度。
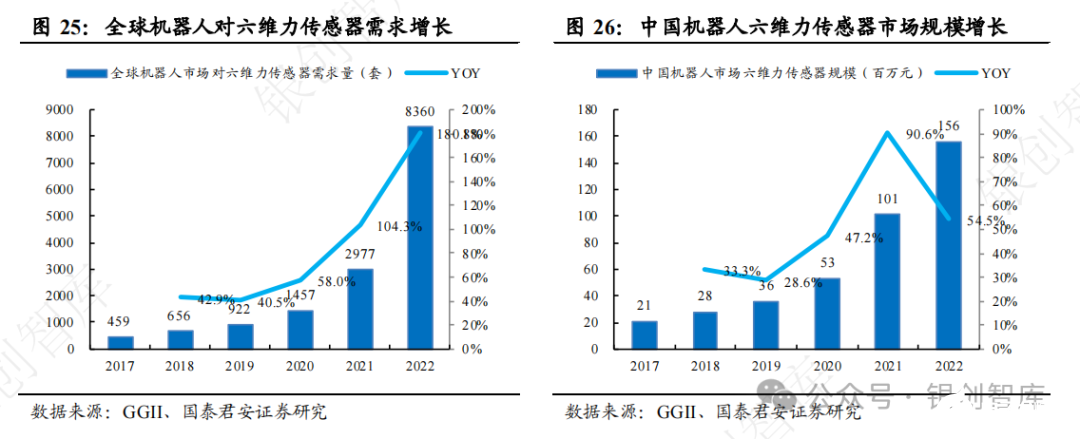
2.3. 六維力矩傳感器市場規模高速增長,國產廠商持續發力 力傳感器市場空間較大,六維力傳感器市場規模有望高速增長。根據貝哲斯咨詢數據,2022 年全球力和力矩傳感器市場規模為 572.4 億元,預計2028年將達到804.83億元人民幣,2022-2028年CAGR預計為5.84%。其中六維力矩傳感器市場規模有望高速增長,2022 年中國人形機器人市場對六維力矩傳感器需求量為 8360 套,市場規模約為 1.56 億元,隨著人形機器人加速發展,六維力矩傳感器市場規模有望高速增長。 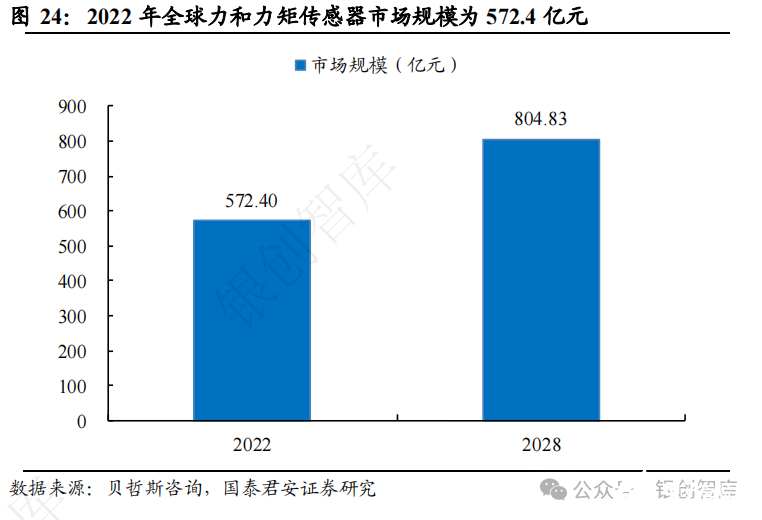
 ? 力控傳感器領域國內外龍頭差距較大,國內宇立和坤維相對領先。根據高工機器人數據,2022 年中國力傳感器市場依然以外資品牌為主導,國產份額低于 30%,國內廠商主要有宇立儀器(未上市)、坤維科技(未上市,航天級技術)、柯力傳感(布局高端力矩傳感)、東華測試(力傳感器技術領先)等,國外主要有 ADI、ST 以及 TDK 等。
? 力控傳感器領域國內外龍頭差距較大,國內宇立和坤維相對領先。根據高工機器人數據,2022 年中國力傳感器市場依然以外資品牌為主導,國產份額低于 30%,國內廠商主要有宇立儀器(未上市)、坤維科技(未上市,航天級技術)、柯力傳感(布局高端力矩傳感)、東華測試(力傳感器技術領先)等,國外主要有 ADI、ST 以及 TDK 等。 
3
柔性傳感器
3.1. 柔性傳感器由柔性基底、薄膜材料等組成 柔性傳感器是由柔性材料制成的傳感器,可用于多種特定場景。柔性材料與剛性材料相對應,具有柔軟、低模量、易變形等屬性,對應制成的柔性傳感器則具有良好的柔韌性、延展性,可自由彎曲或者折疊,結構形式靈活多樣,且在彎曲和伸展的形態下仍能表現出良好的導電性和響應性。得益于其優秀的性能,柔性傳感器已成為現代柔性電子產品的重要組成部分,廣泛運用于電子皮膚、醫療保健、電子電工、運動器材、紡織品、航天航空、環境監測等下游領域。 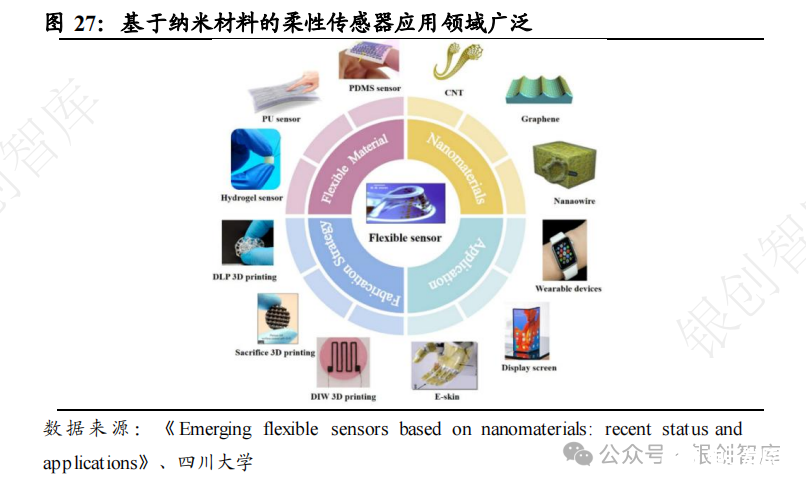 ? 柔性傳感器主要由柔性基底、薄膜材料及電極組成。 1)柔性基底:常用柔性傳感器多采用 PI(聚酰亞胺)、PET(聚酯)或 PEN(聚萘二甲酯乙二醇酯)等作為器件的柔性基底。PI 是綜合性能最 佳的有機高分子材料之一,具有很好的機械性能,抗張強度均在 100MPa 以上,介電常數不高于 3.5(經特殊處理后可抵御 2.5),耐溫點達 250℃ 且可長期使用,并具有優秀的耐輻射、耐化學藥品性能;PET 是一種飽 和的熱塑性聚合物,長期使用溫度可達 120℃,具有很好的光學性,優 良的磨耗摩擦性、尺寸穩定性和電絕緣性,且耐油、脂肪、稀酸/堿,價 格低、產量大、機械性能佳;PEN 是一種新興優良聚合物,比 PET 具有 更高的物理機械、氣體阻隔和耐熱性能,長期使用溫度高達 160℃,且 具備耐紫外線、耐輻射性能。通常會選擇天然橡膠和環氧樹脂來保護納 米結構并改善界面黏合性能。 2)薄膜材料:通常是柔性傳感器的敏感材料,根據被測量信息的不同需 求可采用金屬、導電氧化物、納米復合材料等。金屬薄膜能夠保留基底 的柔性特性,也可明顯改變其表面特性;透明導電氧化物(TCO)薄膜 兼顧可見光范圍光學透明性和良好的導電性,具有可折疊、重量輕、易運輸和大規模生產等優點,其中銦錫氧化物(ITO)較為常用(具有高可 見光透射率、高紅外反射率和低電阻率),鎵或鋁摻雜 ZnO(GZO 或 AZO)也被廣泛研究和應用;納米材料最初以超微顆粒形式在傳感器上使用,近年來逐漸拓展到低維材料和陣列材料,如碳納米粉復合膜、碳納米管復合膜、碳納米管/炭黑/硅橡膠復合陣列等。 3)電極材料:除少部分柔性傳感器薄膜材料與電極為一體外,電極材料也為柔性傳感器的主要構件,其根據使用要求不同采用不同的材料及制作工藝,包括碳材料(石墨烯、碳納米管、碳纖維等)、金屬納米線(銀納米線、銅納米線等)及導電聚合物(聚苯胺等)等,其中碳基納米材料發展前景表現突出,其通常與各種聚合物結合,以獲得柔性和穩定的應變傳感器。
? 柔性傳感器主要由柔性基底、薄膜材料及電極組成。 1)柔性基底:常用柔性傳感器多采用 PI(聚酰亞胺)、PET(聚酯)或 PEN(聚萘二甲酯乙二醇酯)等作為器件的柔性基底。PI 是綜合性能最 佳的有機高分子材料之一,具有很好的機械性能,抗張強度均在 100MPa 以上,介電常數不高于 3.5(經特殊處理后可抵御 2.5),耐溫點達 250℃ 且可長期使用,并具有優秀的耐輻射、耐化學藥品性能;PET 是一種飽 和的熱塑性聚合物,長期使用溫度可達 120℃,具有很好的光學性,優 良的磨耗摩擦性、尺寸穩定性和電絕緣性,且耐油、脂肪、稀酸/堿,價 格低、產量大、機械性能佳;PEN 是一種新興優良聚合物,比 PET 具有 更高的物理機械、氣體阻隔和耐熱性能,長期使用溫度高達 160℃,且 具備耐紫外線、耐輻射性能。通常會選擇天然橡膠和環氧樹脂來保護納 米結構并改善界面黏合性能。 2)薄膜材料:通常是柔性傳感器的敏感材料,根據被測量信息的不同需 求可采用金屬、導電氧化物、納米復合材料等。金屬薄膜能夠保留基底 的柔性特性,也可明顯改變其表面特性;透明導電氧化物(TCO)薄膜 兼顧可見光范圍光學透明性和良好的導電性,具有可折疊、重量輕、易運輸和大規模生產等優點,其中銦錫氧化物(ITO)較為常用(具有高可 見光透射率、高紅外反射率和低電阻率),鎵或鋁摻雜 ZnO(GZO 或 AZO)也被廣泛研究和應用;納米材料最初以超微顆粒形式在傳感器上使用,近年來逐漸拓展到低維材料和陣列材料,如碳納米粉復合膜、碳納米管復合膜、碳納米管/炭黑/硅橡膠復合陣列等。 3)電極材料:除少部分柔性傳感器薄膜材料與電極為一體外,電極材料也為柔性傳感器的主要構件,其根據使用要求不同采用不同的材料及制作工藝,包括碳材料(石墨烯、碳納米管、碳纖維等)、金屬納米線(銀納米線、銅納米線等)及導電聚合物(聚苯胺等)等,其中碳基納米材料發展前景表現突出,其通常與各種聚合物結合,以獲得柔性和穩定的應變傳感器。 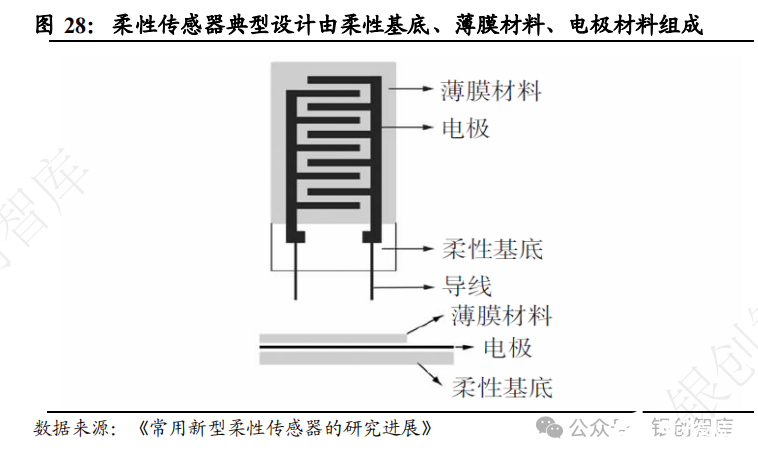 ? 相比普通傳感器,柔性傳感器性能更加優越。普通傳感器硬脆的性質使 其難以進行彎曲和延展,測量范圍也因此受限;柔性傳感器借助于碳納米管、石墨烯、高分子膜、高分子電解質和有機聚合物等性能優越的材料,能夠極大提高延展性及其他性能,適應復雜的不平整表面。
? 相比普通傳感器,柔性傳感器性能更加優越。普通傳感器硬脆的性質使 其難以進行彎曲和延展,測量范圍也因此受限;柔性傳感器借助于碳納米管、石墨烯、高分子膜、高分子電解質和有機聚合物等性能優越的材料,能夠極大提高延展性及其他性能,適應復雜的不平整表面。 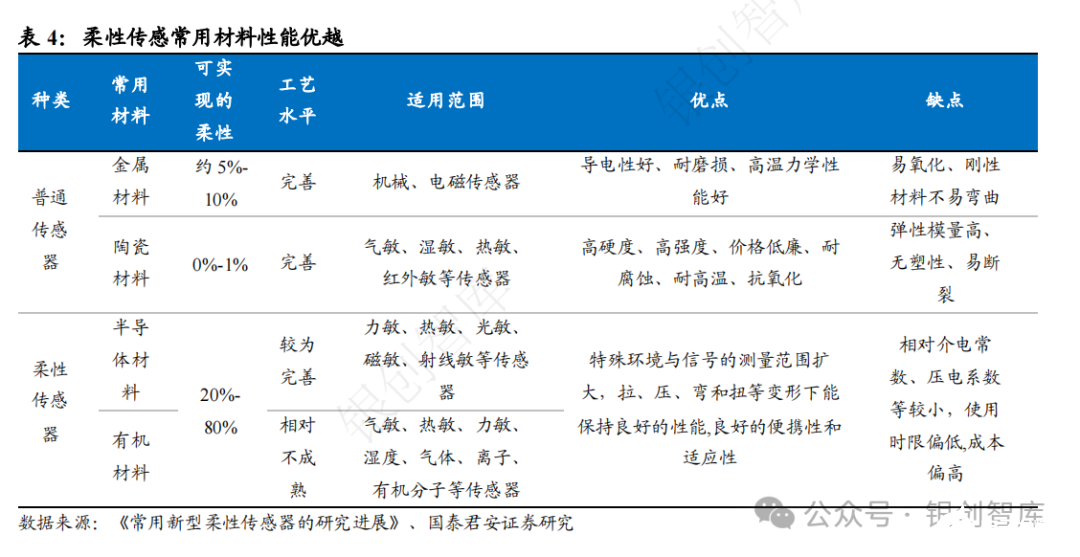 ? 柔性傳感器根據信號轉換機理可分為主要分為 3 大類:電容式、電阻式和壓電式。 1)電容式柔性傳感器:感受到外界壓力時,電極板間的電容值會發生變化,從而引起其他電信號的變化,從而通過測量電信號的變化計算出外力的大小。一般電容式柔性傳感器是在柔性電極中間加上一層具有微結構的介質材料,介質層在受到外界壓力作用下,微結構會發生比較明顯 的變化,引起介質材料的介電特性發生變化,導致電容值產生較為明顯 的變化。電容式柔性傳感器一般通過改變介質層的材料或進行相關的結 構修飾,再或者將柔性基底與高介電常數的物質進行復合,來提高靈敏度。 2)電阻式柔性傳感器:工作原理是把外界施加的壓力值轉化為電阻或者電流值的器件。根據其工作原理的不同分為應變式和壓阻式。應變式柔性傳感器受到外界壓力被拉伸或者壓縮時,導體的橫截面積變化,導電的區域也發生變化,從而導致電阻發生變化;壓阻式柔性傳感器是基于壓阻效應的傳感器,當受到外界壓力作用時,導體材料的電導率會隨著自身的一些微小改變而發生變化。 3)壓電式柔性傳感器:是基于壓電材料的壓電效應的原理而設計的傳感 器。所謂壓電效應是指某些電介質在受到某一方向的外力作用而發生形變(包括彎曲和伸縮形變)時,內部就產生電極化現象,同時在某兩個表面上產生符號相反的電荷。當外力撤去后,電介質又恢復到不帶電的狀態;當外力作用方向改變時,電荷的極性也隨之改變,電介質受力所 產生的電荷量與外力的大小成正比。在此過程中,通過電流的大小可以計算外力的大小。
? 柔性傳感器根據信號轉換機理可分為主要分為 3 大類:電容式、電阻式和壓電式。 1)電容式柔性傳感器:感受到外界壓力時,電極板間的電容值會發生變化,從而引起其他電信號的變化,從而通過測量電信號的變化計算出外力的大小。一般電容式柔性傳感器是在柔性電極中間加上一層具有微結構的介質材料,介質層在受到外界壓力作用下,微結構會發生比較明顯 的變化,引起介質材料的介電特性發生變化,導致電容值產生較為明顯 的變化。電容式柔性傳感器一般通過改變介質層的材料或進行相關的結 構修飾,再或者將柔性基底與高介電常數的物質進行復合,來提高靈敏度。 2)電阻式柔性傳感器:工作原理是把外界施加的壓力值轉化為電阻或者電流值的器件。根據其工作原理的不同分為應變式和壓阻式。應變式柔性傳感器受到外界壓力被拉伸或者壓縮時,導體的橫截面積變化,導電的區域也發生變化,從而導致電阻發生變化;壓阻式柔性傳感器是基于壓阻效應的傳感器,當受到外界壓力作用時,導體材料的電導率會隨著自身的一些微小改變而發生變化。 3)壓電式柔性傳感器:是基于壓電材料的壓電效應的原理而設計的傳感 器。所謂壓電效應是指某些電介質在受到某一方向的外力作用而發生形變(包括彎曲和伸縮形變)時,內部就產生電極化現象,同時在某兩個表面上產生符號相反的電荷。當外力撤去后,電介質又恢復到不帶電的狀態;當外力作用方向改變時,電荷的極性也隨之改變,電介質受力所 產生的電荷量與外力的大小成正比。在此過程中,通過電流的大小可以計算外力的大小。 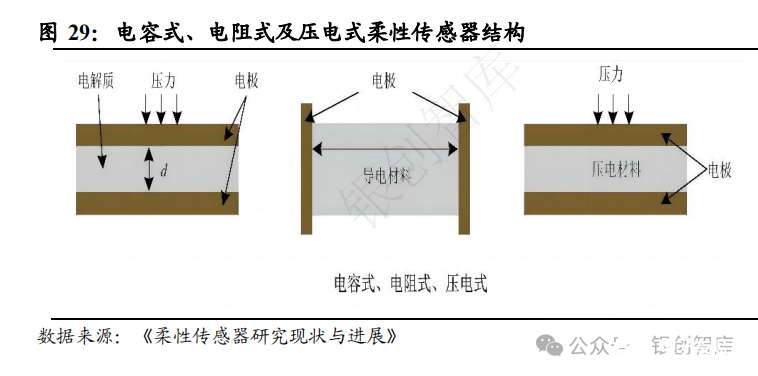 ? 3.2. 電子皮膚有望向感知壓力、溫度等多種信號發展 電子皮膚(E-skin)是柔性傳感器的重要應用。皮膚是最重要的人體器官之一,具有延展性、自愈性、高機械韌性等特征,可以對各種形狀和紋理、溫度變化以及接觸壓力等進行感知,而模仿人類皮膚的特征以及 具備相似感知功能的設備通常被稱為電子皮膚。與人類皮膚相似,電子皮膚具有柔韌、舒適、安全等特點,被視為未來電子技術的新興發展方向,在人形機器人觸覺方案中得到較多關注。
? 3.2. 電子皮膚有望向感知壓力、溫度等多種信號發展 電子皮膚(E-skin)是柔性傳感器的重要應用。皮膚是最重要的人體器官之一,具有延展性、自愈性、高機械韌性等特征,可以對各種形狀和紋理、溫度變化以及接觸壓力等進行感知,而模仿人類皮膚的特征以及 具備相似感知功能的設備通常被稱為電子皮膚。與人類皮膚相似,電子皮膚具有柔韌、舒適、安全等特點,被視為未來電子技術的新興發展方向,在人形機器人觸覺方案中得到較多關注。 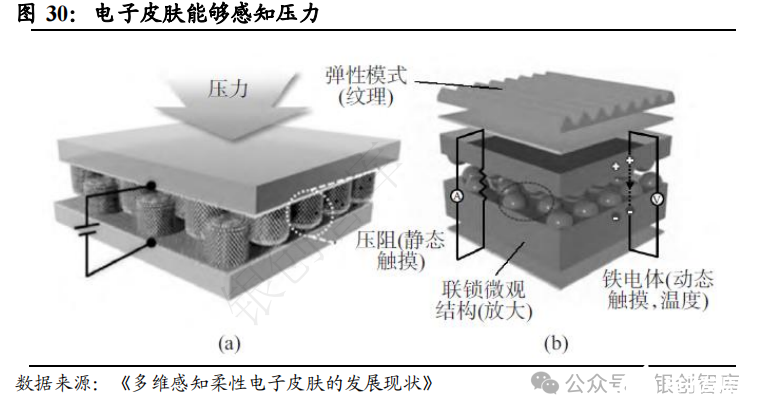 ? 電子皮膚一般由電極、介電材料、活性功能層、柔性基材組成。當感受到外界壓力時,活性功能層將應變、濕度、溫度等信號轉換為可探測的電信號,并在功能層兩側的電極層完成接收和傳輸,最終傳遞至目標區域,從而實現“觸覺”傳輸。柔性基材能夠承載電子皮膚,并確保其與生物皮膚等材料的相容性,優良的柔性材料能夠給傳感器提供高靈敏度、寬傳感范圍、高動態響應和高重復性。
? 電子皮膚一般由電極、介電材料、活性功能層、柔性基材組成。當感受到外界壓力時,活性功能層將應變、濕度、溫度等信號轉換為可探測的電信號,并在功能層兩側的電極層完成接收和傳輸,最終傳遞至目標區域,從而實現“觸覺”傳輸。柔性基材能夠承載電子皮膚,并確保其與生物皮膚等材料的相容性,優良的柔性材料能夠給傳感器提供高靈敏度、寬傳感范圍、高動態響應和高重復性。 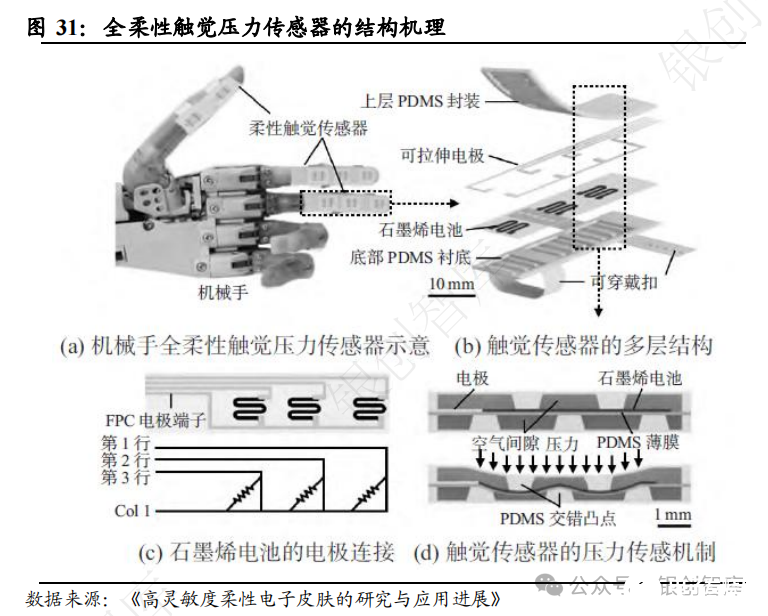 ? 電子皮膚具有四大特性:可拉伸性、自愈合性、生物相容性及生物降解性。 1)可拉伸性:在多種機械應力的作用下,電子皮膚將在不同方向上發生 形變。提升電子皮膚可拉伸性主要有兩種技術路徑——材料創新(開發 單一或聚合形式的可拉伸新型材料來制造電子皮膚)或結構設計(改造 脆性材料制的結構,使其能夠吸收施加的應變)。 在材料創新方面,以下幾種材料通常被納入考慮范圍: ①水凝膠:由水等混合溶劑作為分散劑的三維網狀凝膠,具有良好的可拉伸性、自修復 能力、生物相容性和離子導電率,經改造可獲得較高的機械性能,但穩定性較差,開發具有高穩定性、耐凍性的水凝膠是當前研究重點; ②液態金屬:液態金屬具有優秀的導電性及可變形能力,其中鎵及其合金因 其低毒性和高導電率在電子皮膚領域得到了廣泛的應用。其缺點在于表面張力較高,難以加工并與其他材料兼容,需要通過界面材料改性克服;
? 電子皮膚具有四大特性:可拉伸性、自愈合性、生物相容性及生物降解性。 1)可拉伸性:在多種機械應力的作用下,電子皮膚將在不同方向上發生 形變。提升電子皮膚可拉伸性主要有兩種技術路徑——材料創新(開發 單一或聚合形式的可拉伸新型材料來制造電子皮膚)或結構設計(改造 脆性材料制的結構,使其能夠吸收施加的應變)。 在材料創新方面,以下幾種材料通常被納入考慮范圍: ①水凝膠:由水等混合溶劑作為分散劑的三維網狀凝膠,具有良好的可拉伸性、自修復 能力、生物相容性和離子導電率,經改造可獲得較高的機械性能,但穩定性較差,開發具有高穩定性、耐凍性的水凝膠是當前研究重點; ②液態金屬:液態金屬具有優秀的導電性及可變形能力,其中鎵及其合金因 其低毒性和高導電率在電子皮膚領域得到了廣泛的應用。其缺點在于表面張力較高,難以加工并與其他材料兼容,需要通過界面材料改性克服;
③導電聚合物:聚合物是絕大多數柔性電子設備的基本組成單元,選用 本征導電的聚合物作為構筑基元,可同時實現柔韌性、導電性及較好的機械性能。目前已成功應用于電子皮膚制備的聚合物材料包括 PEDOT:PSS、聚吡咯、聚乙炔、聚噻吩等; ④納米材料:基于納米材料 的可拉伸導體通過在可拉伸的聚合物基體中混合導電填料在彈性體中形成滲透網絡,從而為復合材料提供電流通路,且其外形薄,具有卓越 的機械順從性,在柔性電子設備領域具有巨大的應用前景。常用的納米填料有零維納米顆粒、具有高縱橫比的一維納米線以及具有較大表面積的二維納米片;高分子聚合物如降解塑料、聚二甲基硅氧烷和聚乙烯醇等通常被用作彈性基底,為滲透網絡賦予可拉伸性。 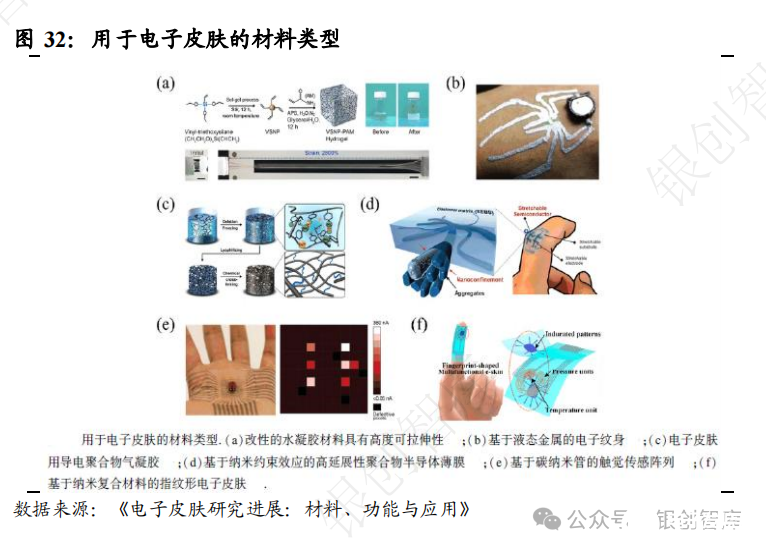 ? 在結構設計方面,通常考慮以下幾種結構: ①波形結構:通過施加預應 力對平面結構的基材進行預拉伸,修飾好所需的活性材料后再釋放預應 力,從而將上層的導電或活性材料層改造為波浪結構,使得其形變時能 夠釋放部分壓力,缺點是該結構可提供的拉伸性極其有限; ②島-橋結構:由導電線路(橋)及固定位置的功能性元器件(島)組成,其中蛇形結 構較為常見,其形狀簡單、易于加工,可實現電子皮膚的高可拉伸性; ③折紙/剪紙結構:折紙包含預先布置的折疊結構,能夠有效地減緩其在 折疊、彎曲、拉伸等過程中所產生的應力變化,從而提供高通用性、大 變形性和與剛性電子相當的性能;剪紙結構將平面結構轉化規則排列的 鏤空結構,是基材能夠充分釋放形變中產生的應力,實現更強的可拉伸 形變能力; ④織物結構:織物大多數由高分子材料組成,天然具有優異 的力學性能,只需要輔以合適的導電及其他功能性材料,即可構建優異 的柔性電子產品。
? 在結構設計方面,通常考慮以下幾種結構: ①波形結構:通過施加預應 力對平面結構的基材進行預拉伸,修飾好所需的活性材料后再釋放預應 力,從而將上層的導電或活性材料層改造為波浪結構,使得其形變時能 夠釋放部分壓力,缺點是該結構可提供的拉伸性極其有限; ②島-橋結構:由導電線路(橋)及固定位置的功能性元器件(島)組成,其中蛇形結 構較為常見,其形狀簡單、易于加工,可實現電子皮膚的高可拉伸性; ③折紙/剪紙結構:折紙包含預先布置的折疊結構,能夠有效地減緩其在 折疊、彎曲、拉伸等過程中所產生的應力變化,從而提供高通用性、大 變形性和與剛性電子相當的性能;剪紙結構將平面結構轉化規則排列的 鏤空結構,是基材能夠充分釋放形變中產生的應力,實現更強的可拉伸 形變能力; ④織物結構:織物大多數由高分子材料組成,天然具有優異 的力學性能,只需要輔以合適的導電及其他功能性材料,即可構建優異 的柔性電子產品。 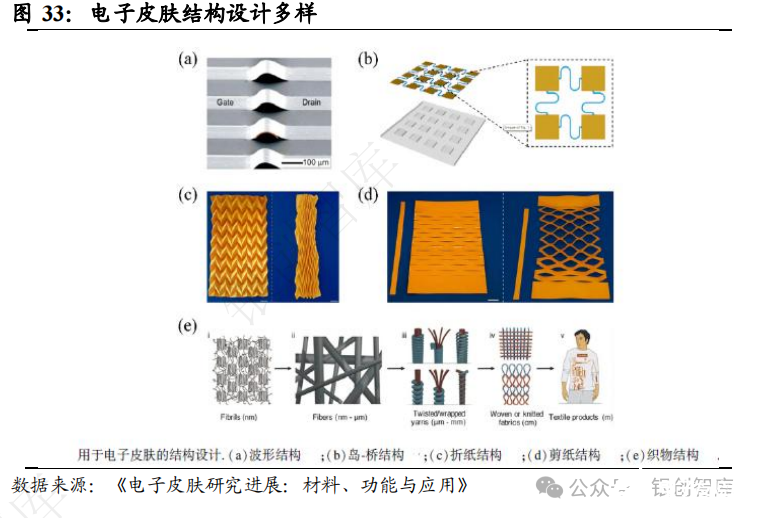 ? 2)自愈合性:當材料遭受損傷時,其內部化學鍵發生斷裂,而這些動態 的化學鍵(氫鍵、二硫鍵、金屬配位鍵等)通過擴散發生重組,從而實 現自修復。目前自愈合材料的研究重點聚焦于開發具有延展性和自愈合 性的高分子材料,這類材料在電子皮膚領域具有廣闊的應用前景。
? 2)自愈合性:當材料遭受損傷時,其內部化學鍵發生斷裂,而這些動態 的化學鍵(氫鍵、二硫鍵、金屬配位鍵等)通過擴散發生重組,從而實 現自修復。目前自愈合材料的研究重點聚焦于開發具有延展性和自愈合 性的高分子材料,這類材料在電子皮膚領域具有廣闊的應用前景。 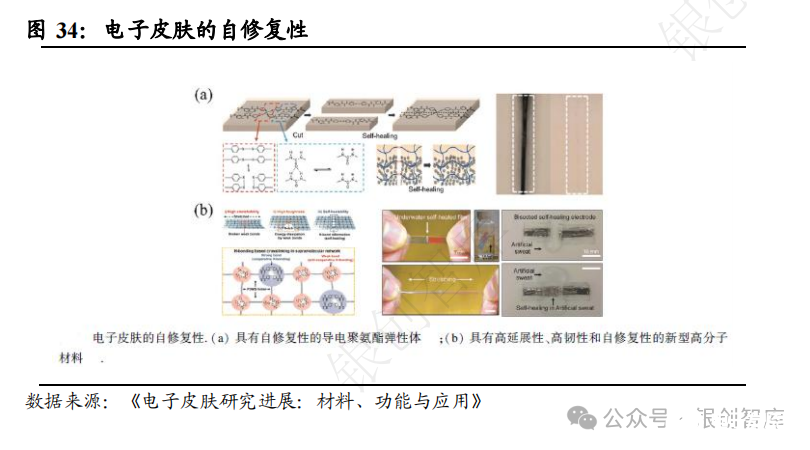 ? 3)生物相容性及生物降解性:電子皮膚的應用場景通常與生物界面緊密相關,而生物相容性是避免引發免疫反應的重要性質。目前開發生物兼容和生物可降解裝置的相關研究已有重大進步,使電子皮膚的應用更加穩定。
? 3)生物相容性及生物降解性:電子皮膚的應用場景通常與生物界面緊密相關,而生物相容性是避免引發免疫反應的重要性質。目前開發生物兼容和生物可降解裝置的相關研究已有重大進步,使電子皮膚的應用更加穩定。 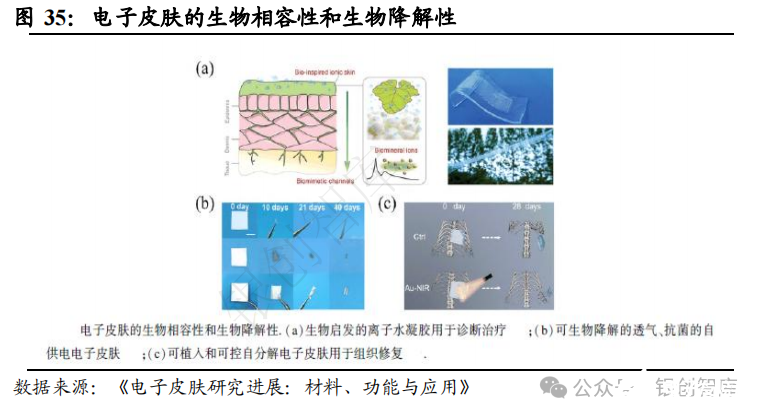 ? 機器感知是電子皮膚在機器人領域的重要應用。諸如智能類人機器人和假肢機器人的設計目標是實現精準的類人操作,需要實現高精度的集成 感測功能,因此相應的柔性電子皮膚需要考慮以下幾個方面的需求:① 對多個機械刺激和觸覺反饋進行實時檢測;②集成多功能傳感器,可檢測溫度、濕度、硬度等多種參數;③人機界面的無線信號傳輸和控制。目前的研究方向需聚焦于可部署的、高分辨率的傳感器皮膚、能夠高效處理密集傳感器信息的算法以及機器人的高精度反饋控制,最終目標是 讓機器人實現高度類人的感知能力和觸摸能力。
? 機器感知是電子皮膚在機器人領域的重要應用。諸如智能類人機器人和假肢機器人的設計目標是實現精準的類人操作,需要實現高精度的集成 感測功能,因此相應的柔性電子皮膚需要考慮以下幾個方面的需求:① 對多個機械刺激和觸覺反饋進行實時檢測;②集成多功能傳感器,可檢測溫度、濕度、硬度等多種參數;③人機界面的無線信號傳輸和控制。目前的研究方向需聚焦于可部署的、高分辨率的傳感器皮膚、能夠高效處理密集傳感器信息的算法以及機器人的高精度反饋控制,最終目標是 讓機器人實現高度類人的感知能力和觸摸能力。 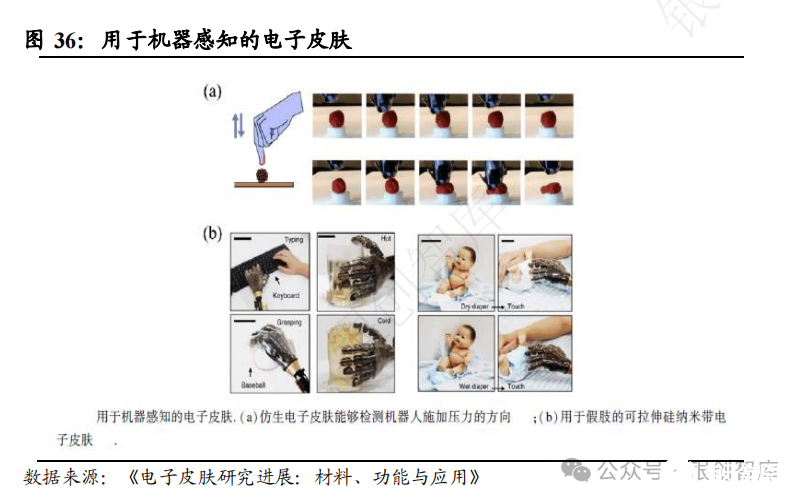 ? 為實現或超越人體皮膚的感知能力,目前的電子皮膚已經向多模式復合方向發展。已有的一種智能集成的多層納米纖維結構仿生多功能柔性傳 感器可同時檢測壓力、濕度和溫度信號,該電子皮膚由四部分組成:第 一層為壓力感應層;第二層為溫度傳感層;第三層用于濕度檢測;第四 層采用摩擦電采集系統收集生物力學能量,并為溫度和濕度傳感提供能 量。溫度傳感層以多壁碳納米管和 PEDOT:PSS 作為導電材料,濕度傳 感層則以酸化碳納米管為導電材料。
? 為實現或超越人體皮膚的感知能力,目前的電子皮膚已經向多模式復合方向發展。已有的一種智能集成的多層納米纖維結構仿生多功能柔性傳 感器可同時檢測壓力、濕度和溫度信號,該電子皮膚由四部分組成:第 一層為壓力感應層;第二層為溫度傳感層;第三層用于濕度檢測;第四 層采用摩擦電采集系統收集生物力學能量,并為溫度和濕度傳感提供能 量。溫度傳感層以多壁碳納米管和 PEDOT:PSS 作為導電材料,濕度傳 感層則以酸化碳納米管為導電材料。 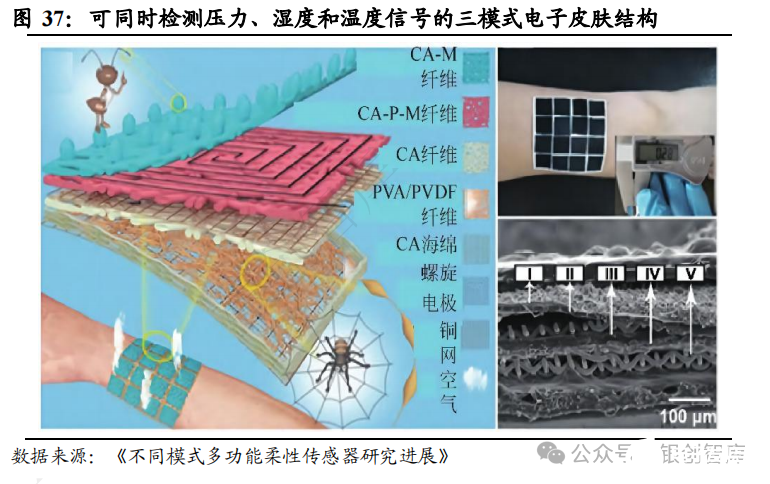 ? 現有的多維電子皮膚除常規的壓力/應變、溫度感知外,還可實現對微弱氣體、pH 及葡萄糖等刺激的感知。
? 現有的多維電子皮膚除常規的壓力/應變、溫度感知外,還可實現對微弱氣體、pH 及葡萄糖等刺激的感知。 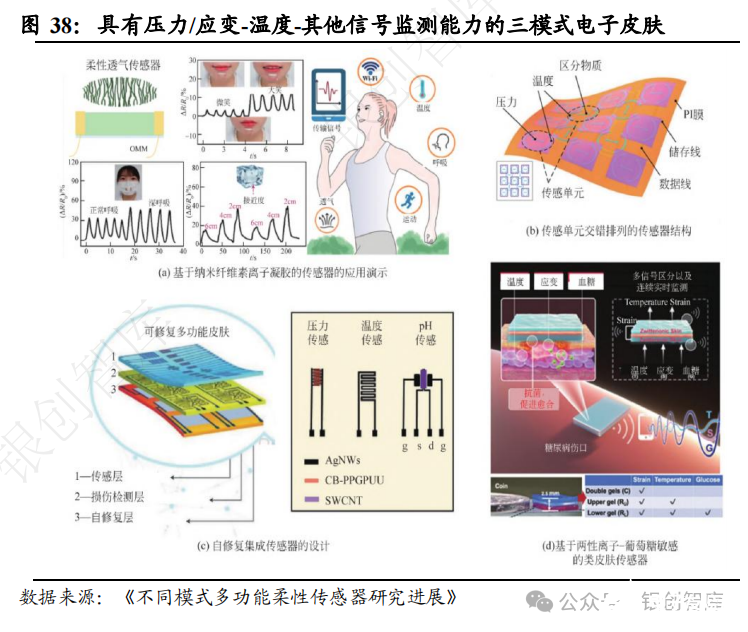 ? 電子皮膚大規模量產仍有幾大技術難度亟需突破。 1)制造工藝有待簡化。為滿足電子皮膚可彎曲性和延展性的需要,電子 皮膚的電路大多采用蛇形幾何結構,并使用轉印技術將電路組裝到彈性 基底上,缺點是該工藝設計繁瑣,且通常需要專門的潔凈室,成本很高。電子打印技術(3D 打印和噴墨打印等)有望簡化相應的制造流程,并具 有成本低廉、可擴展生產等優勢,但在柔性基材上印刷仍然存在技術性 挑戰,有待進一步優化。 2)多功能檢測能力有待提升。目前多功能電子皮膚設備的應用規模有限, 尤其是集成物理和化學信號的檢測功能。為了實現對生物皮膚的高度模 仿,同時獲取各種形式的數據在先進水平的電子皮膚應用中十分重要, 并能根據不同形式的信息得到更加準確的分析結果。 3)有待集成更多智能模塊。目前的電子皮膚只具備初級信號處理能力, 在面對大數據和復雜算法時通常需要借助外部設備幫助。若傳感器內能 夠集成計算能力更強的小型化智能模塊,則有望消除對外部剛性設備的 依賴,提升電子皮膚柔性水平,并實現高精度的分析和控制。 4)柔性集成芯片有待進一步發展。在集成度較低的水平下,現有電子皮 膚需依賴剛性集成芯片以實現復雜動作,因此犧牲柔性和拉伸性,并且 剛柔結合部位因材料楊氏模量差別較大,會導致器件整體的抗疲勞性下 降,工作狀態不穩定。因此,混合電子皮膚的剛柔結合策略亟待優化, 以及柔性集成芯片的研發以期實現多功能的全柔性電子皮膚。 3.3. 柔性傳感市場空間巨大,國產廠商積極布局 柔性傳感器市場空間巨大。據弗若斯特沙利文數據,2022 年全球柔性電 子市場規模已達 586.2 億美元,預計 2025 年市場規模將達到 3049.4 億 美元,2023-2025 年內的 CAGR 達到 70.17%。隨著人形機器人加速發展, 柔性電子市場有望快速增長。
? 電子皮膚大規模量產仍有幾大技術難度亟需突破。 1)制造工藝有待簡化。為滿足電子皮膚可彎曲性和延展性的需要,電子 皮膚的電路大多采用蛇形幾何結構,并使用轉印技術將電路組裝到彈性 基底上,缺點是該工藝設計繁瑣,且通常需要專門的潔凈室,成本很高。電子打印技術(3D 打印和噴墨打印等)有望簡化相應的制造流程,并具 有成本低廉、可擴展生產等優勢,但在柔性基材上印刷仍然存在技術性 挑戰,有待進一步優化。 2)多功能檢測能力有待提升。目前多功能電子皮膚設備的應用規模有限, 尤其是集成物理和化學信號的檢測功能。為了實現對生物皮膚的高度模 仿,同時獲取各種形式的數據在先進水平的電子皮膚應用中十分重要, 并能根據不同形式的信息得到更加準確的分析結果。 3)有待集成更多智能模塊。目前的電子皮膚只具備初級信號處理能力, 在面對大數據和復雜算法時通常需要借助外部設備幫助。若傳感器內能 夠集成計算能力更強的小型化智能模塊,則有望消除對外部剛性設備的 依賴,提升電子皮膚柔性水平,并實現高精度的分析和控制。 4)柔性集成芯片有待進一步發展。在集成度較低的水平下,現有電子皮 膚需依賴剛性集成芯片以實現復雜動作,因此犧牲柔性和拉伸性,并且 剛柔結合部位因材料楊氏模量差別較大,會導致器件整體的抗疲勞性下 降,工作狀態不穩定。因此,混合電子皮膚的剛柔結合策略亟待優化, 以及柔性集成芯片的研發以期實現多功能的全柔性電子皮膚。 3.3. 柔性傳感市場空間巨大,國產廠商積極布局 柔性傳感器市場空間巨大。據弗若斯特沙利文數據,2022 年全球柔性電 子市場規模已達 586.2 億美元,預計 2025 年市場規模將達到 3049.4 億 美元,2023-2025 年內的 CAGR 達到 70.17%。隨著人形機器人加速發展, 柔性電子市場有望快速增長。 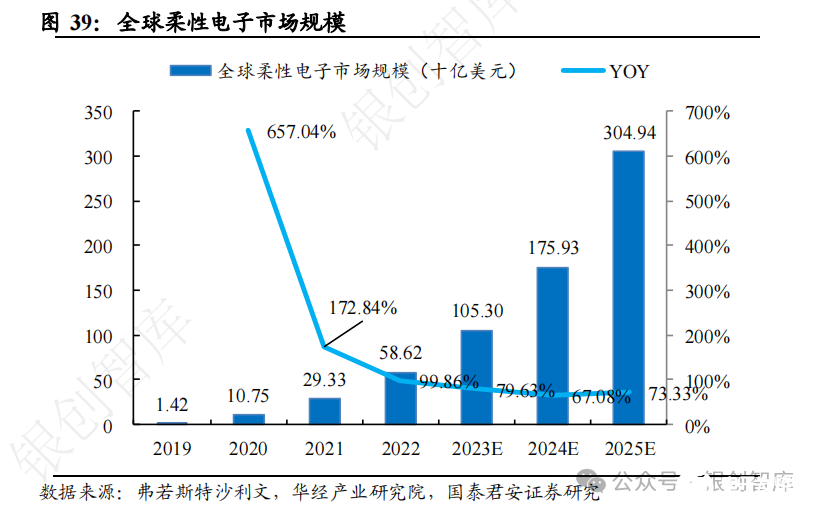 ? 柔性傳感器市場競爭日趨激烈。目前我國柔性傳感器行業涌現出了大量 的企業,企業數量眾多,形成了相對分散的競爭格局。中國柔性傳感器企業的技術水平存在一定差異,國內主要廠商有:漢威科技、柔宇科技、上海思澄等。
? 柔性傳感器市場競爭日趨激烈。目前我國柔性傳感器行業涌現出了大量 的企業,企業數量眾多,形成了相對分散的競爭格局。中國柔性傳感器企業的技術水平存在一定差異,國內主要廠商有:漢威科技、柔宇科技、上海思澄等。 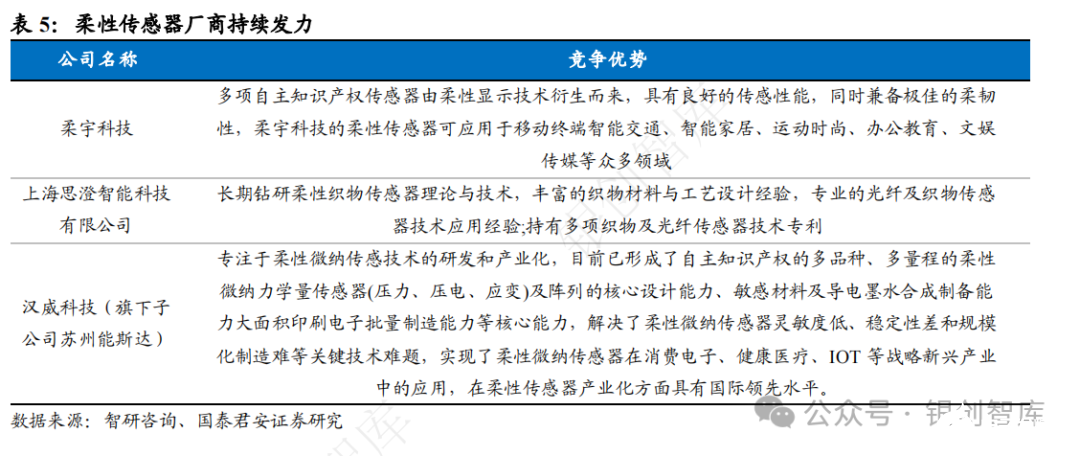
4
MEMS 傳感器
4.1. MEMS 傳感器可分為慣性傳感器、壓力傳感器等 MEMS 產品具有高集成、微型化、智能化、低功耗等特點,在人形機器人領域擁有廣闊的應用空間。MEMS(Micro Electromechanical System) 是指利用硅基半導體制造工藝將微型傳感器、執行器以及信號處理和控制電路、接口電路、通信和電源集成于一體的微型機電系統。基于 MEMS 工藝制造的芯片具有低功耗、微型化、智能化、高集成度以及可大批量生產等特點,能夠滿足人形機器人對于傳感器微型化、低功耗以及低成本的需求,因而在人形機器人領域擁有廣闊的應用空間。 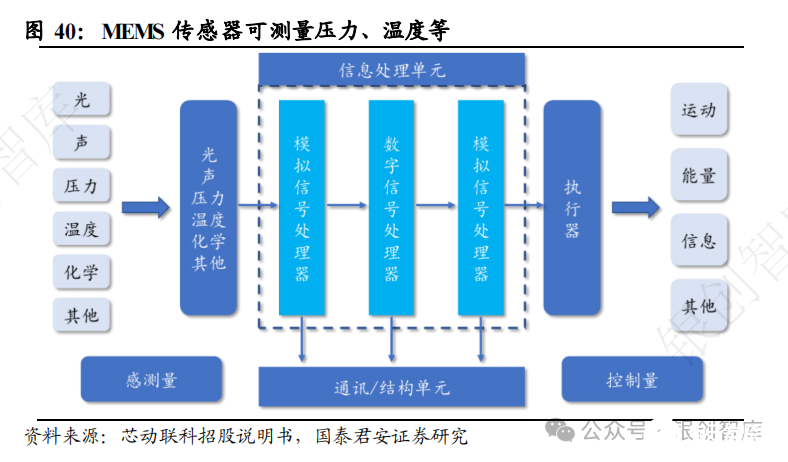 ? 半導體行業經營模式主要分為 IDM 和Fabless,MEMS 行業 Fabless 模 式有其特殊之處。MEMS 行業 Fabless 模式的特殊之處在于:晶圓代工 廠在制造基于 CMOS 工藝的集成電路產品上有較多的技術積累,因此大 規模集成電路的設計企業只需要負責芯片的研發與銷售,但是由于 MEMS 產品的技術工藝具有非標化的特點,一款 MEMS 芯片通常需要 對應一套加工工藝方案,所以 MEMS 芯片設計企業需要深度參與第三 方制造企業的工藝開發和持續優化調整的過程。
? 半導體行業經營模式主要分為 IDM 和Fabless,MEMS 行業 Fabless 模 式有其特殊之處。MEMS 行業 Fabless 模式的特殊之處在于:晶圓代工 廠在制造基于 CMOS 工藝的集成電路產品上有較多的技術積累,因此大 規模集成電路的設計企業只需要負責芯片的研發與銷售,但是由于 MEMS 產品的技術工藝具有非標化的特點,一款 MEMS 芯片通常需要 對應一套加工工藝方案,所以 MEMS 芯片設計企業需要深度參與第三 方制造企業的工藝開發和持續優化調整的過程。  ? MEMS 行業需要跨學科知識與技術的綜合運用,MEMS 芯片各環節均需技術積累。MEMS 產品的研發與設計需要機械、電子、材料、半導體等跨學科知識以及機械制造、半導體制造等跨行業技術的積累和整合。在芯片設計環節,MEMS 傳感器設計廠商需要考慮溫度、應力、生產工藝帶來的偏差等因素對產品性能、品質的影響,在芯片設計環節通過 MEMS 芯片內部結構的空間排布來抵消部分偏差;在晶圓制造環節,由于一般晶圓代工廠缺乏成熟的 MEMS 工藝模塊,需要 MEMS 設計企業與晶圓代工廠基于既有平臺共同開發適合自身產品的生產工藝,來提升產品批量化生產的穩定性;在封裝測試環節,封裝結構需要在保護內部結構的同時,實現芯片內部與外部的信號交互,而測試環節需要公司根據產品應用領域和性能需求的不同,設計不同的測試卡控機制,以完成對規模量產前的品質管控。 全球 MEMS 市場有望持續增長,國內 MEMS 市場增速高于全球市場。根據 Yole Intelligence 的數據,2027 年全球 MEMS 市場規模有望達到 222.53 億美元,2018-2027 年復合年均增長率為 9.30%。根據中商產業研究院的數據,2023 年國內 MEMS 市場規模有望達到 1132 億元,2018- 2023 年復合年均增長率高達 17.47%,高于全球 MEMS 市場增速。(根據 Yole Intelligence 的數據,2018-2023 年全球 MEMS 市場復合年均增長 率為 9.47%)
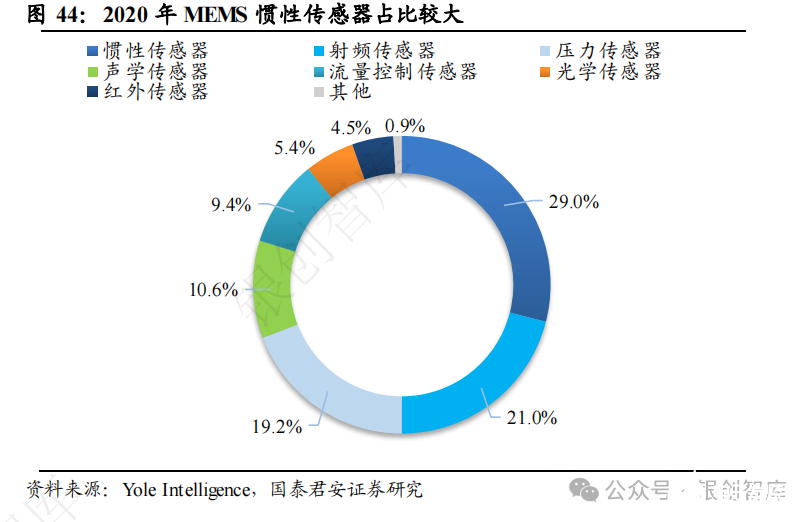
? MEMS 行業需要跨學科知識與技術的綜合運用,MEMS 芯片各環節均需技術積累。MEMS 產品的研發與設計需要機械、電子、材料、半導體等跨學科知識以及機械制造、半導體制造等跨行業技術的積累和整合。在芯片設計環節,MEMS 傳感器設計廠商需要考慮溫度、應力、生產工藝帶來的偏差等因素對產品性能、品質的影響,在芯片設計環節通過 MEMS 芯片內部結構的空間排布來抵消部分偏差;在晶圓制造環節,由于一般晶圓代工廠缺乏成熟的 MEMS 工藝模塊,需要 MEMS 設計企業與晶圓代工廠基于既有平臺共同開發適合自身產品的生產工藝,來提升產品批量化生產的穩定性;在封裝測試環節,封裝結構需要在保護內部結構的同時,實現芯片內部與外部的信號交互,而測試環節需要公司根據產品應用領域和性能需求的不同,設計不同的測試卡控機制,以完成對規模量產前的品質管控。 全球 MEMS 市場有望持續增長,國內 MEMS 市場增速高于全球市場。根據 Yole Intelligence 的數據,2027 年全球 MEMS 市場規模有望達到 222.53 億美元,2018-2027 年復合年均增長率為 9.30%。根據中商產業研究院的數據,2023 年國內 MEMS 市場規模有望達到 1132 億元,2018- 2023 年復合年均增長率高達 17.47%,高于全球 MEMS 市場增速。(根據 Yole Intelligence 的數據,2018-2023 年全球 MEMS 市場復合年均增長 率為 9.47%) 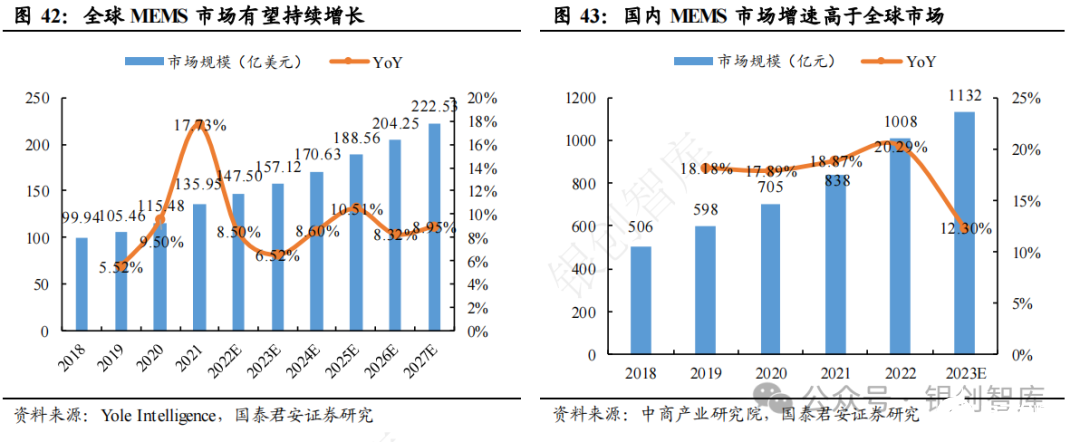 ? MEMS 產品應用領域豐富,慣性、壓力等傳感器屬于重要產品。根據敏芯股份招股說明書,MEMS 傳感器可以分為慣性傳感器、壓力傳感器、 聲學傳感器、環境傳感器以及光學傳感器。根據 Yole Development 發布的《Status of the MEMS Industry 2021》,2020 年慣性、射頻、壓力、聲學、流量控制、光學、紅外等七大類 MEMS 傳感器在整個 MEMS 傳感器市場總量的占比分別為 29%、21%、19.2%、10.6%、9.4%、5.4%、4.5%, MEMS 慣性傳感器、壓力傳感器與聲學傳感器作為可以應用于人形機器人的重要傳感器,均在 MEMS 傳感器市場中占據了重要地位,三者合計占比達到了 58.8%。
? MEMS 產品應用領域豐富,慣性、壓力等傳感器屬于重要產品。根據敏芯股份招股說明書,MEMS 傳感器可以分為慣性傳感器、壓力傳感器、 聲學傳感器、環境傳感器以及光學傳感器。根據 Yole Development 發布的《Status of the MEMS Industry 2021》,2020 年慣性、射頻、壓力、聲學、流量控制、光學、紅外等七大類 MEMS 傳感器在整個 MEMS 傳感器市場總量的占比分別為 29%、21%、19.2%、10.6%、9.4%、5.4%、4.5%, MEMS 慣性傳感器、壓力傳感器與聲學傳感器作為可以應用于人形機器人的重要傳感器,均在 MEMS 傳感器市場中占據了重要地位,三者合計占比達到了 58.8%。 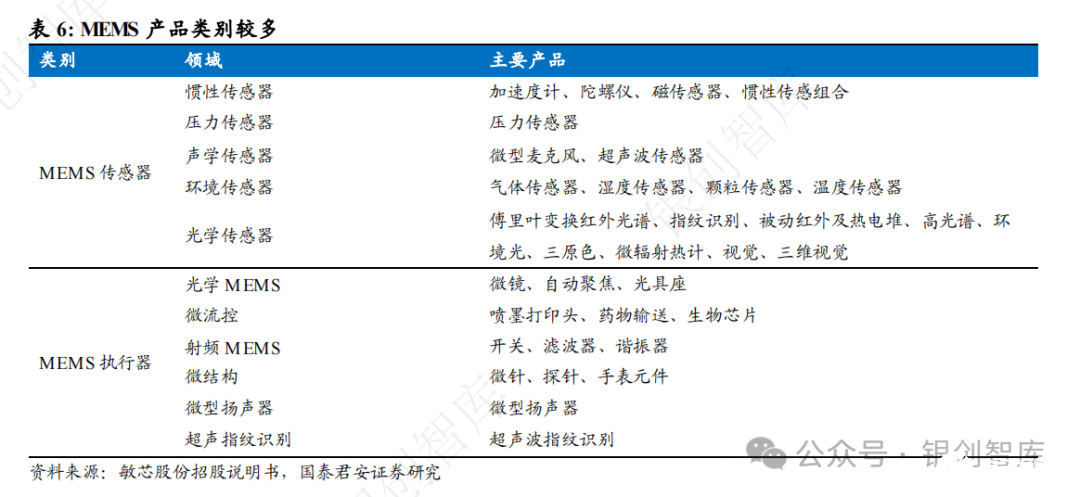
 ? 4.2. MEMS 慣性傳感器:IMU 可測量角速度與加速度 MEMS 加速度計用于測量物體線加速度,電容式 MEMS 加速度計目前 在市場中占據主導。MEMS 加速度計是一種能夠測量物體線加速度的器件,通常由質量塊、阻尼器、彈性元件、敏感元件和適調電路等部分組成,其測量原理為:在加速過程中,通過對質量塊所受慣性力的測量計算出加速度值,而在初速度已知的情況下,可以通過加速度對時間積分得到線速度,再次通過線速度對時間積分則可計算出直線位移。根據感測原理,MEMS 加速度計可分為壓阻式、電容式以及熱式等多種類型, 其中電容式 MEMS 加速度計具有高靈敏度、高精度、低溫度敏感的特點,目前在市場中占據主導地位。
? 4.2. MEMS 慣性傳感器:IMU 可測量角速度與加速度 MEMS 加速度計用于測量物體線加速度,電容式 MEMS 加速度計目前 在市場中占據主導。MEMS 加速度計是一種能夠測量物體線加速度的器件,通常由質量塊、阻尼器、彈性元件、敏感元件和適調電路等部分組成,其測量原理為:在加速過程中,通過對質量塊所受慣性力的測量計算出加速度值,而在初速度已知的情況下,可以通過加速度對時間積分得到線速度,再次通過線速度對時間積分則可計算出直線位移。根據感測原理,MEMS 加速度計可分為壓阻式、電容式以及熱式等多種類型, 其中電容式 MEMS 加速度計具有高靈敏度、高精度、低溫度敏感的特點,目前在市場中占據主導地位。 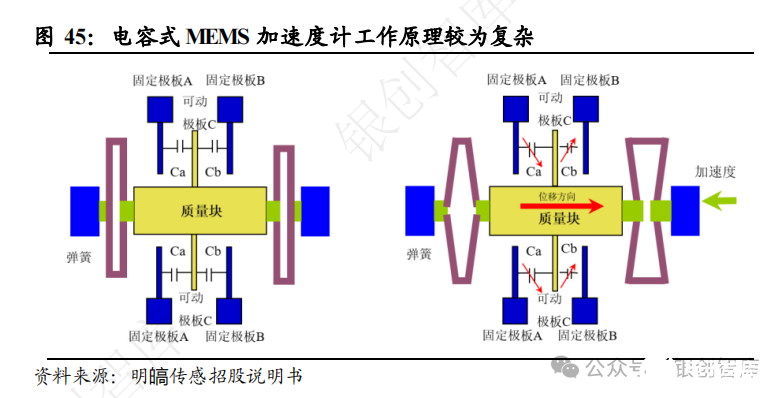 ? MEMS 陀螺儀利用科里奧利效應測量角速率,主要應用于導航定位、姿態感知、平臺穩定等應用領域。MEMS 陀螺儀的核心是一顆微機械 (MEMS)芯片,一顆專用控制電路(ASIC)芯片及應力隔離封裝,科里奧利效應為其基本工作原理:可動質量塊在驅動電路控制下高速震蕩,當物體轉動時,質量塊發生垂直于震蕩方向的橫向位移,橫向位移的大小與輸入角速率的大小成正比,因而可以通過測量橫向位移實現對角速率的測量。
? MEMS 陀螺儀利用科里奧利效應測量角速率,主要應用于導航定位、姿態感知、平臺穩定等應用領域。MEMS 陀螺儀的核心是一顆微機械 (MEMS)芯片,一顆專用控制電路(ASIC)芯片及應力隔離封裝,科里奧利效應為其基本工作原理:可動質量塊在驅動電路控制下高速震蕩,當物體轉動時,質量塊發生垂直于震蕩方向的橫向位移,橫向位移的大小與輸入角速率的大小成正比,因而可以通過測量橫向位移實現對角速率的測量。 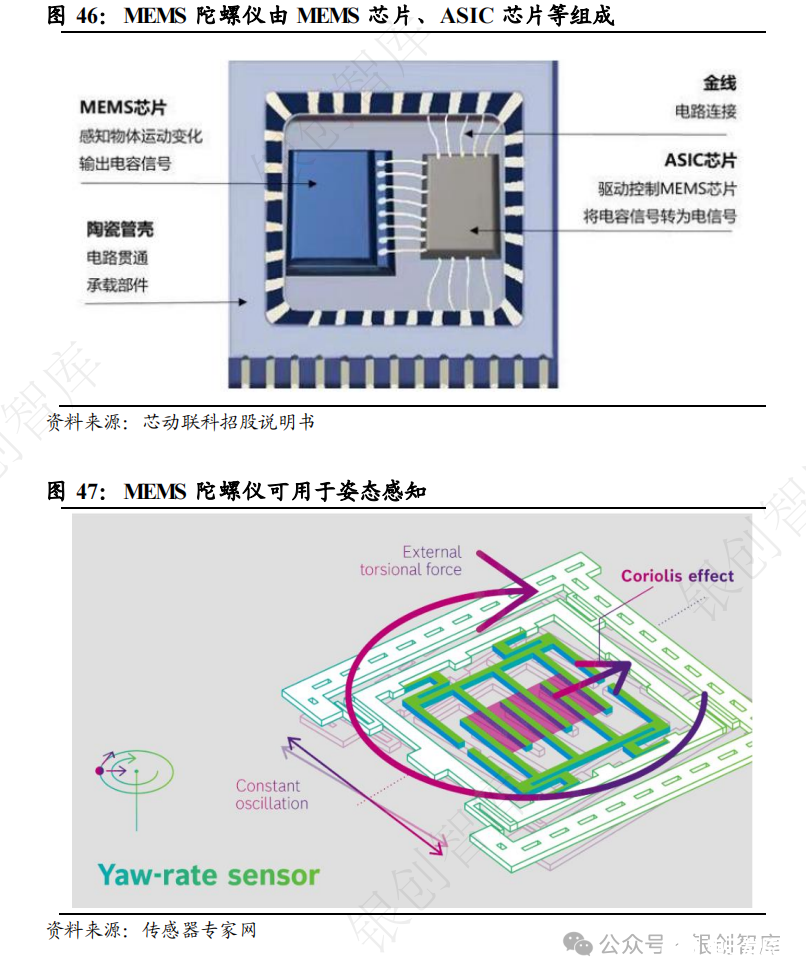 ? IMU 由加速度計與陀螺儀組成,可測量物體在三維空間中的角速率和加速度,助力人行機器人實現姿態控制、平衡維持等需求。一個 IMU 通常包含三個軸向的陀螺儀和三個軸向的加速度計,可以測量物體在三維空間中的角速率和加速度。IMU 是人形機器人保持平衡及運動控制的關鍵 傳感器,可以幫助人形機器人實現姿態控制、平衡維持、導航定位等需求。
? IMU 由加速度計與陀螺儀組成,可測量物體在三維空間中的角速率和加速度,助力人行機器人實現姿態控制、平衡維持等需求。一個 IMU 通常包含三個軸向的陀螺儀和三個軸向的加速度計,可以測量物體在三維空間中的角速率和加速度。IMU 是人形機器人保持平衡及運動控制的關鍵 傳感器,可以幫助人形機器人實現姿態控制、平衡維持、導航定位等需求。
姿態控制與平衡維持:慣性穩控系統通過連續監測系統姿態與位置變化,利用控制算法對伺服結構進行控制,從而動態調整系統姿態,以實現機器人保持穩定姿態與平衡的目標。 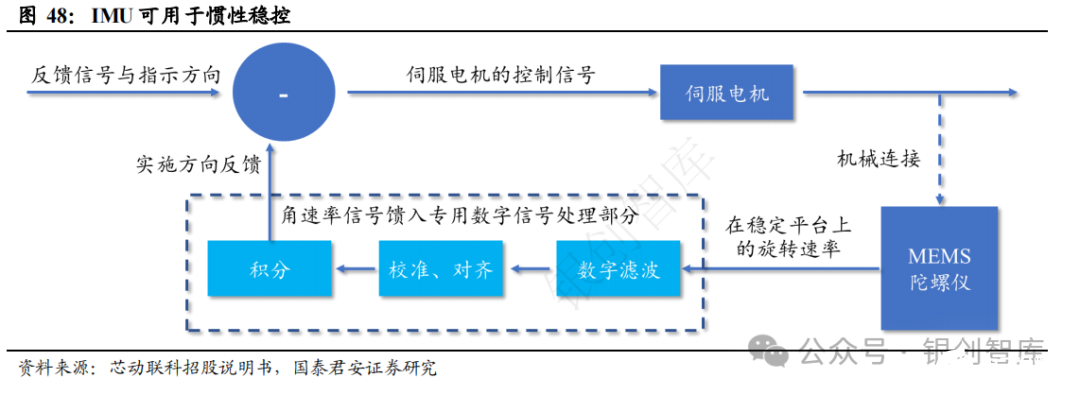 ? 導航定位:通過對角速率和線加速度按時間積分以及疊加運算,人形機 器人可以動態確定自身位置變化,而且因為無需借助外源信息,所以可 以免受外界干擾影響。
? 導航定位:通過對角速率和線加速度按時間積分以及疊加運算,人形機 器人可以動態確定自身位置變化,而且因為無需借助外源信息,所以可 以免受外界干擾影響。 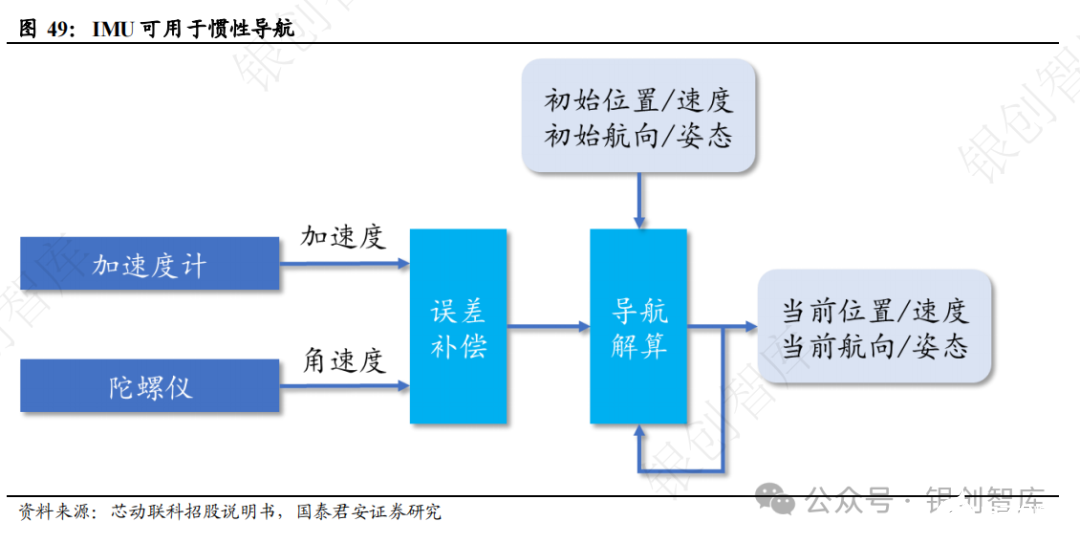 ? 全球 MEMS 慣性傳感器市場有望持續增長,IMU 正逐步替代獨立的 MEMS 陀螺儀。MEMS 慣性傳感器是將物體運動的加速度、位置和姿態轉換為電信號的器件,包括 MEMS 加速度計、MEMS 陀螺儀、磁力計和慣性測量單元(IMU)。根據 Yole Intelligence 數據,在整體市場規模方面,全球 MEMS 慣性傳感器的市場規模已從 2018 年的 28.31 億美元增長至了 2021 年的 35.09 億美元,預計到 2027 年市場規模有望達到 49.44 億美元,2018-2027 年的復合年均增長率為 6.39%;在市場的產品結構方面,MEMS 加速度計、磁力計和 IMU 的市場持續增長,MEMS 陀螺儀的市場則呈現逐年萎縮的態勢,主要是由于在高端消費電子和汽車電子市場中 IMU 正逐步取代獨立的 MEMS 陀螺儀。
? 全球 MEMS 慣性傳感器市場有望持續增長,IMU 正逐步替代獨立的 MEMS 陀螺儀。MEMS 慣性傳感器是將物體運動的加速度、位置和姿態轉換為電信號的器件,包括 MEMS 加速度計、MEMS 陀螺儀、磁力計和慣性測量單元(IMU)。根據 Yole Intelligence 數據,在整體市場規模方面,全球 MEMS 慣性傳感器的市場規模已從 2018 年的 28.31 億美元增長至了 2021 年的 35.09 億美元,預計到 2027 年市場規模有望達到 49.44 億美元,2018-2027 年的復合年均增長率為 6.39%;在市場的產品結構方面,MEMS 加速度計、磁力計和 IMU 的市場持續增長,MEMS 陀螺儀的市場則呈現逐年萎縮的態勢,主要是由于在高端消費電子和汽車電子市場中 IMU 正逐步取代獨立的 MEMS 陀螺儀。 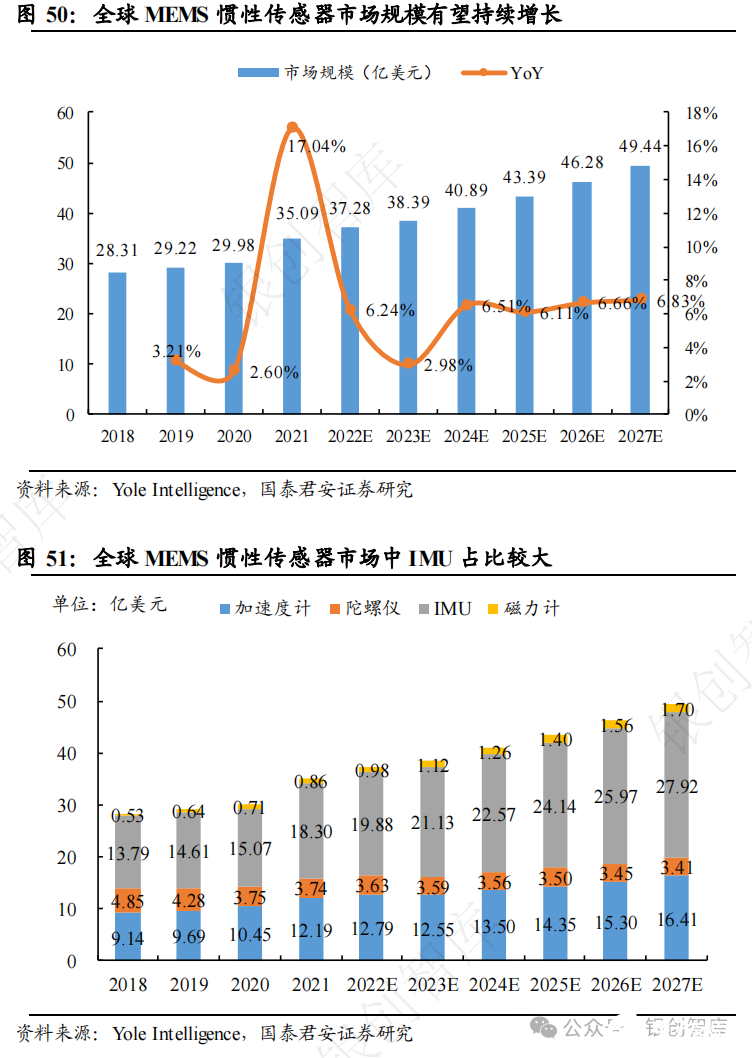 ? MEMS 慣性傳感器市場由國際廠商占據主導,市場集中度較高。根據 Yole Intelligence 數據,在 MEMS 加速度計市場方面,博世、ST、MURATA、 NXP、ADI 為前五大廠商,CR5 市場份額為 84%;在 MEMS 陀螺儀市場方面,TDK、ADI、HONEYWELL、博世、ST 為前五大廠商,CR5 市場份額 為 83%;在 IMU 市場方面,博世、ST、TDK、HONEYWELL、ADI 為前五大廠商,CR5 市場份額為 88%。國內的 MEMS 慣性傳感器行業起步較晚, 國內企業整體的銷售規模相比國外龍頭企業仍有較大差距,故而目前 MEMS 慣性傳感器市場的主要市場份額還是由國際廠商占據。
? MEMS 慣性傳感器市場由國際廠商占據主導,市場集中度較高。根據 Yole Intelligence 數據,在 MEMS 加速度計市場方面,博世、ST、MURATA、 NXP、ADI 為前五大廠商,CR5 市場份額為 84%;在 MEMS 陀螺儀市場方面,TDK、ADI、HONEYWELL、博世、ST 為前五大廠商,CR5 市場份額 為 83%;在 IMU 市場方面,博世、ST、TDK、HONEYWELL、ADI 為前五大廠商,CR5 市場份額為 88%。國內的 MEMS 慣性傳感器行業起步較晚, 國內企業整體的銷售規模相比國外龍頭企業仍有較大差距,故而目前 MEMS 慣性傳感器市場的主要市場份額還是由國際廠商占據。 
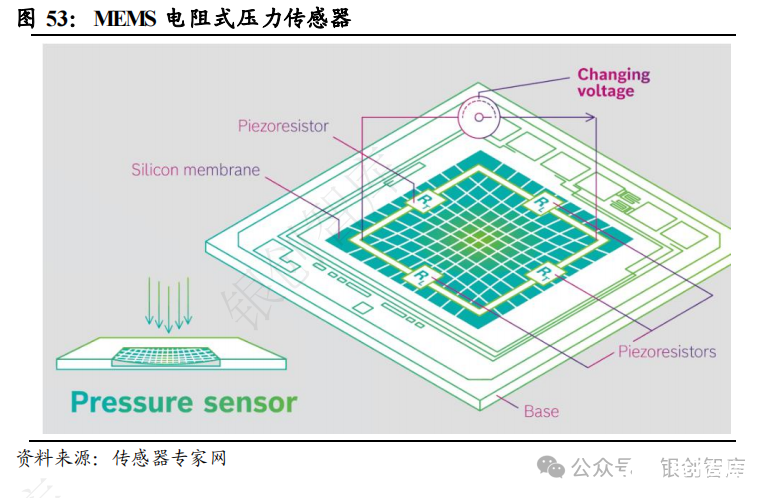
 ? 4.3. MEMS 壓力傳感器:可用于人形機器人手指感知 MEMS 壓力傳感器常用類型為電容式、電阻式以及壓電式,可應用于人形機器人手指。三種類型的 MEMS 壓力傳感器的工作原理有所不同:1) 電容式 MEMS 壓力傳感器:傳感器受到壓力時,傳感器上下兩個橫隔 (傳感器橫隔上部、傳感器下部)之間的間距變化會導致隔板之間的電容變化,根據電容變化可以測算出壓力大小;2)電阻式 MEMS 壓力傳感器:傳感器由一個帶有硅薄膜的底座和安裝在其上的電阻結構組成。傳感器受到壓力時,電壓與壓力大小會成比例變化,根據該變化可以測量出壓力的大小;3)壓電式 MEMS 壓力傳感器:傳感器的敏感元件由壓電材料制作而成。壓電材料受外力作用后表面會產生電荷,電荷通過電荷放大器、測量電路的放大以及變換阻抗后,會被轉換為與所受外力成正比關系的電量輸出,由此可以測量出壓力的大小。我們認為,通過將柔性 MEMS 壓力傳感器集成到機器人手部,有望幫助機器人實現靈敏的觸覺感知。
? 4.3. MEMS 壓力傳感器:可用于人形機器人手指感知 MEMS 壓力傳感器常用類型為電容式、電阻式以及壓電式,可應用于人形機器人手指。三種類型的 MEMS 壓力傳感器的工作原理有所不同:1) 電容式 MEMS 壓力傳感器:傳感器受到壓力時,傳感器上下兩個橫隔 (傳感器橫隔上部、傳感器下部)之間的間距變化會導致隔板之間的電容變化,根據電容變化可以測算出壓力大小;2)電阻式 MEMS 壓力傳感器:傳感器由一個帶有硅薄膜的底座和安裝在其上的電阻結構組成。傳感器受到壓力時,電壓與壓力大小會成比例變化,根據該變化可以測量出壓力的大小;3)壓電式 MEMS 壓力傳感器:傳感器的敏感元件由壓電材料制作而成。壓電材料受外力作用后表面會產生電荷,電荷通過電荷放大器、測量電路的放大以及變換阻抗后,會被轉換為與所受外力成正比關系的電量輸出,由此可以測量出壓力的大小。我們認為,通過將柔性 MEMS 壓力傳感器集成到機器人手部,有望幫助機器人實現靈敏的觸覺感知。 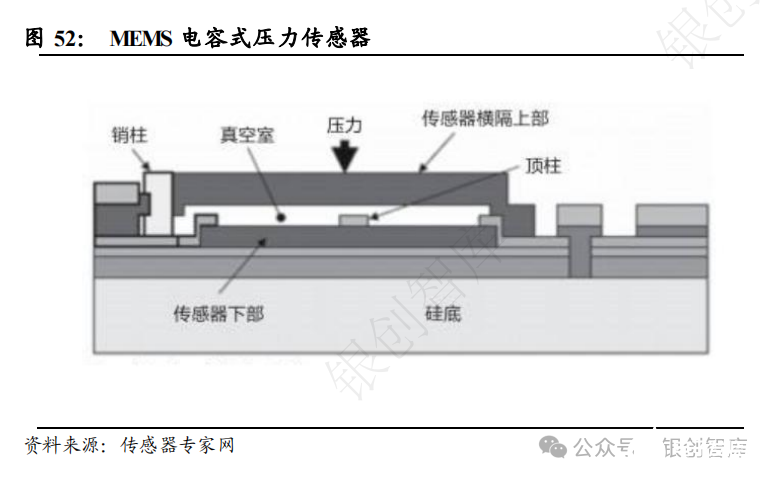
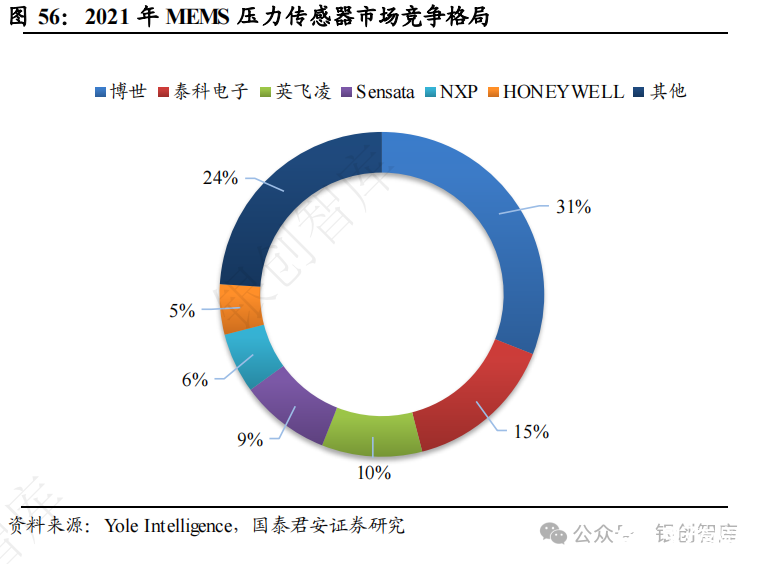
 ? 全球 MEMS 壓力傳感器市場有望持續增長,國際廠商占據主要市場份額。根據 Yole Intelligence 的數據,在市場規模方面,全球 MEMS 壓力傳感器已從 2018 年的 17.63 億元提升至了 2021 年的 20.04 億美元,在 2027 年則有望達到 26.24 億美元;在銷售量方面,全球 MEMS 壓力傳感器已從 2018 年的 14.72 億顆提升至了 16.05 億顆,在 2027 年則有望達到 25.35 億顆;在市場競爭格局方面,全球 MEMS 壓力傳感器市場由國際廠商占據主導地位,博世、泰科電子、英飛凌、Sensata、NXP、Honeyw ell 為前六大廠商,占據的市場份額分別為 31%、15%、10%、9%、6%、5%, CR6 市場份額達到了 76%,市場集中度較高。
? 全球 MEMS 壓力傳感器市場有望持續增長,國際廠商占據主要市場份額。根據 Yole Intelligence 的數據,在市場規模方面,全球 MEMS 壓力傳感器已從 2018 年的 17.63 億元提升至了 2021 年的 20.04 億美元,在 2027 年則有望達到 26.24 億美元;在銷售量方面,全球 MEMS 壓力傳感器已從 2018 年的 14.72 億顆提升至了 16.05 億顆,在 2027 年則有望達到 25.35 億顆;在市場競爭格局方面,全球 MEMS 壓力傳感器市場由國際廠商占據主導地位,博世、泰科電子、英飛凌、Sensata、NXP、Honeyw ell 為前六大廠商,占據的市場份額分別為 31%、15%、10%、9%、6%、5%, CR6 市場份額達到了 76%,市場集中度較高。 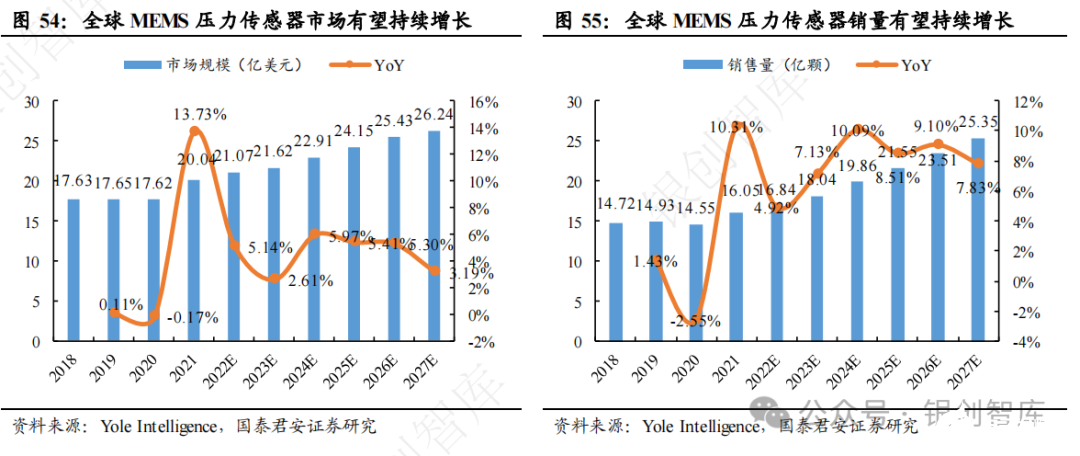
 ? ? 審核編輯 黃宇
? ? 審核編輯 黃宇
-
傳感器
+關注
關注
2548文章
50681瀏覽量
752021 -
測量
+關注
關注
10文章
4772瀏覽量
111136 -
人形機器人
+關注
關注
2文章
423瀏覽量
16486
發布評論請先 登錄
相關推薦
今年中國人形機器人市場規模將達27.6億元
FUTEK傳感器在人形機器人中的應用
人形機器人帶動無框力矩電機需求,廠商積極布局




百億級傳感器賽道誕生,這家國產力傳感器龍頭公司如何掘金?
人形機器人領域六維力傳感器市場規模將達138.40億元

OpenAI入局人形機器人 Figure AI公司獲得6.75億美元融資
全面分析:人形機器人快速發展,哪些國產傳感器將受益?(深度報告)







 工商網監
工商網監
評論