") 市場上主流的定位技術(shù)匯總
市場上主流的定位技術(shù)匯總
本文來源:物聯(lián)傳媒
本文作者:銀匠
毫無疑問,數(shù)字化是當(dāng)今社會發(fā)展最主要的主題的之一,目前已有的千行百業(yè)都可以結(jié)合數(shù)字化升級重新做一遍,這就是產(chǎn)業(yè)升級。
而從數(shù)字化這個名字就可以聽出,“數(shù)據(jù)”是數(shù)字化的核心,而眾多的數(shù)據(jù)中,空間位置數(shù)據(jù)是一個最基本的維度,這是定位技術(shù)產(chǎn)業(yè)發(fā)展的基礎(chǔ)邏輯。
但如果你真的想從事定位這個行業(yè),那么就會知道,原來定位技術(shù)的種類有這么多!且每種定位技術(shù)都有自己的優(yōu)缺點。
尤其是目前市場環(huán)境之下,融合定位方案無論在C端的消費產(chǎn)品還是在B端的行業(yè)應(yīng)用方案中,逐漸成為主流,因此,想要做好定位產(chǎn)業(yè),就需要對市場各種定位技術(shù)都有一定的了解與認知。
第一個維度:從是否需要有定位基礎(chǔ)設(shè)施投入的角度來分,可以分為兩種:需要有基礎(chǔ)設(shè)施以及點對點定位測距。
本文梳理匯總了市場上主流的定位技術(shù)。
01 UWB
技術(shù)介紹:
UWB(Ultra Wideband)是一種無載波通信技術(shù),利用納秒至微秒級的非正弦波窄脈沖傳輸數(shù)據(jù)。
2002 年,美國FCC(美國聯(lián)邦通信委員會)正式將 3.1 GHz- 10.6 GHz 頻帶作為室內(nèi)通信用途對UWB 開放,標(biāo)志著 UWB 開始用于民用無線通信。
在中國,2023年初,工信部無線電管理局發(fā)布了《超寬帶(UWB)設(shè)備無線電管理規(guī)定(征求意見稿)》,根據(jù)新版《規(guī)定》,未來國內(nèi)UWB技術(shù)的使用頻段為:7235-8750MHz。
UWB有三大能力:
1、通信
作為一種通信技術(shù),UWB的特點有:傳輸數(shù)據(jù)大,可達幾百Mbit/s、傳輸距離可達上百米,不過傳輸距離遠了之后傳輸能力會大幅衰減、安全性能高,對一般通信系統(tǒng)而言,UWB 信號相當(dāng)于白噪聲信號,很難被其他設(shè)備所獲取。
2、雷達
UWB作為雷達技術(shù)源具有的特點有:UWB具有較高的空間分辨能力、使其具有較強的目標(biāo)識別能力等,可用于短距離雷達,車載活體檢測等。
3、高精度定位
UWB作為一種高精度定位能力其特點有:精度高,定位精度可達厘米級,這是目前市場上以射頻信號做定位源定位精度做高的幾乎,其次還有容量大,相較于其他的無線定位技術(shù),有更大的容量,時延低等特點。
UWB定位算法有三類:
1、ToA(或ToF)
TOA 通過分別測量移動終端與三個或更多基站之間信號的傳播時間來定位,它采用了圓周定位。

2、TDOA
TDOA 是基于到達時間差定位,系統(tǒng)中需要有精確時間同步功能。
時間同步有兩種,一種是通過有線做時間同步,有線時間同步可以控制在 0.1ns 以內(nèi),同步精度非常高,但由于采用有線,所有設(shè)備要么采用中心網(wǎng)絡(luò)的方式,要么采用級聯(lián)的方式,但增加了網(wǎng)絡(luò)維護的復(fù)雜度,也增加了施工的復(fù)雜度,成本升高。并且,系統(tǒng)中還有一個專用的有線時間同步器,綜合價格比較昂貴。

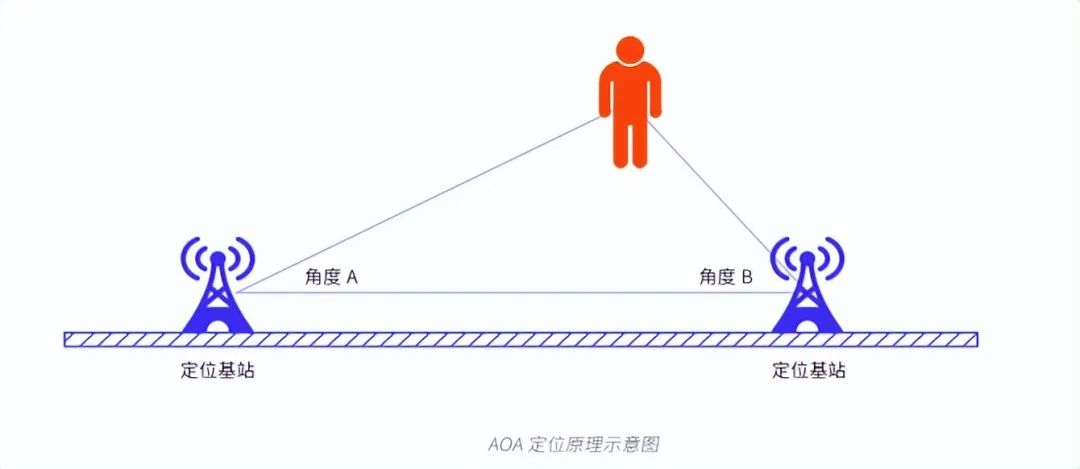
3、AOA
AOA 定位一般是基于相位差的方式計算出到達角度,一般不單獨使用,由于 AOA 涉及到角度分辨率的問題,若單純 AoA 定位,若離基站越遠,定位精度就越差。
市場介紹:
目前,UWB定位技術(shù)正多點開花,我們將UWB定位市場分為了4大類:
第一類市場:IoT企業(yè)級應(yīng)用。包括化工廠、發(fā)電廠、煤礦、公檢法司、倉儲物流等等。
第二類市場:IoT消費級應(yīng)用。包括各種加入了UWB芯片的智能硬件,比如電視遙控器、寵物項圈、尋物Tag、智能機器人等。
第三類市場:汽車市場。典型的產(chǎn)品就是汽車數(shù)字鑰匙等。
第四類市場:手機市場。就是手機里面加入UWB芯片。
02 BLE(低功耗藍牙)定位技術(shù)
BLE定位技術(shù)是指用BLE做信號源從而實現(xiàn)定位功能,根據(jù)其定位方式的差異,可以分為四類。
第一類:藍牙AoA/AoD定位
藍牙5.1標(biāo)準引入了AoA和AoD的角度定位算法,通過藍牙設(shè)備感知發(fā)射節(jié)點信號的到達/發(fā)送方向,計算接收節(jié)點和發(fā)射節(jié)點之間的相對方位或角度,定位精度可以做到亞米級(1m以內(nèi))。
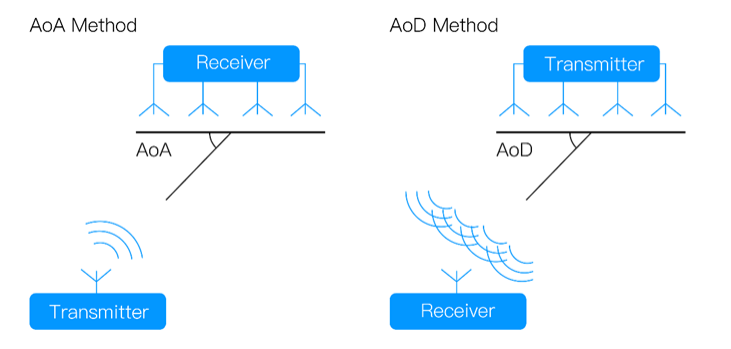
AoA與AoD技術(shù)示意圖
AoA是利用單一天線發(fā)射尋向信號,而接收終端內(nèi)置天線陣列,當(dāng)信號通過時,會因陣列天線接收的距離不同而產(chǎn)生相位差,進而計算出信號的方向。
AoD則正好相反,由具備陣列天線的設(shè)備來發(fā)射信號,傳給單一天線終端,接收終端可以通過接收到的信號計算出來波的方向,進而實現(xiàn)定位。
第二類:藍牙Beacon定位
藍牙Beacon是基于RSSI(信號強度)做定位,不同于網(wǎng)關(guān)單基站定位,藍牙Beacon的方案是三邊定位,即通過三個(及以上)基站交叉測算出更為精準的位置信息,精度范圍在1-3m之間。
第三類:消費類點對點定位產(chǎn)品
所謂點對點定位產(chǎn)品指的是以手機為核心,不需要布置定位網(wǎng)絡(luò),只需要被定位的產(chǎn)品與手機進行連接即可。
其定位原理包括了藍牙RSSI與AoA,因為RSSI與AoA現(xiàn)在基本都是藍牙芯片的標(biāo)配,具體到產(chǎn)品到底有沒有AoA,最主要的是看有沒有加AoA天線。
而以手機為核心的點對點藍牙定位場景最有代表就是尋物Tag以及汽車鑰匙。
第四類:藍牙網(wǎng)關(guān)房間級定位
即核心設(shè)備是藍牙網(wǎng)關(guān),通過藍牙網(wǎng)關(guān),結(jié)合RSSI做到房間級別的定位,這個方案非常適合資產(chǎn)管理場景。
因為一般的企業(yè)庫存或者重要的資產(chǎn)管理只需要做到房間級別的精度就夠了,而如果要管理的設(shè)備數(shù)量不是特別大的話,采用藍牙網(wǎng)關(guān)定位是成本最低的方案。
而根據(jù)我們調(diào)研了解,BLE還有第五類定位技術(shù),其標(biāo)準預(yù)計會在未來幾年之內(nèi)正式發(fā)布,本文也對其進行提前預(yù)告:
第五類:藍牙信道探測(Channel Sounding)
BLE CS提供一種相位測距 (PBR:phase?based ranging)方案,主要用于兩個 BLE 設(shè)備之間的高精度距離測量 (HADM: high accuracy distance measurements)。
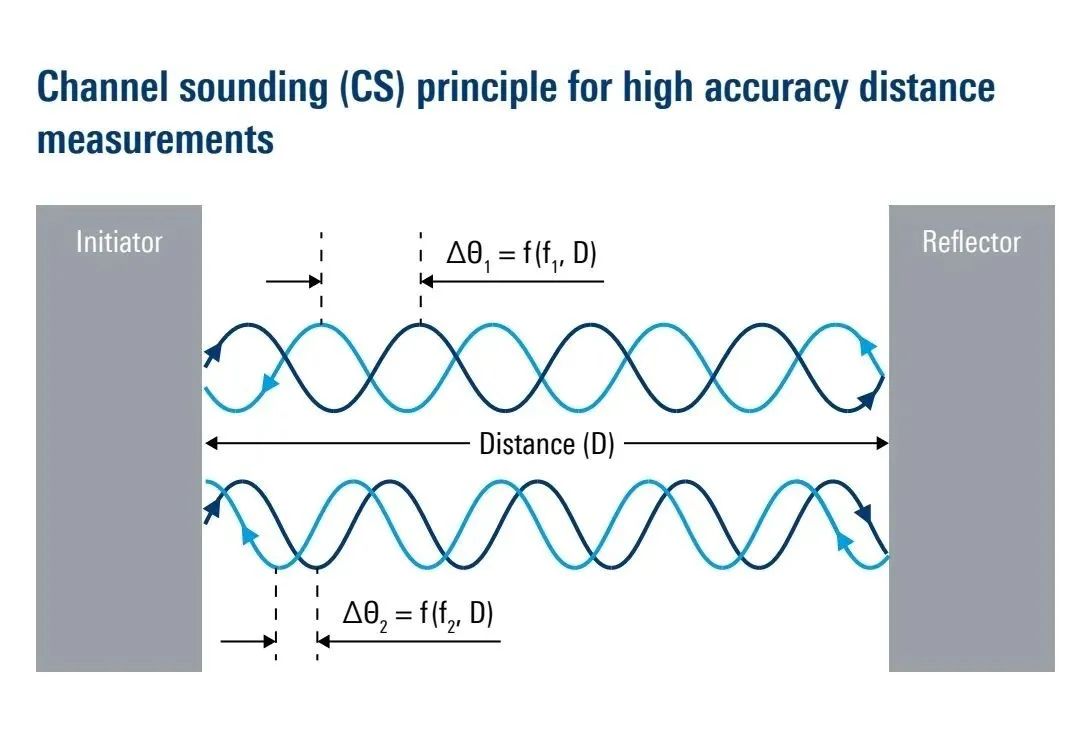
在頻率f上,PBR測量信號通過距離D傳播時的相移來計算距離的。當(dāng)使用兩個或多個不同頻率的信號時,可以測量信號之間的相位差來測算距離。
當(dāng)使用信道探測估計距離時,一個設(shè)備啟動程序(initiator),第二個設(shè)備在不修改相位的情況下重復(fù)信號傳輸(reflector)。
對于頻率為fi 的每次傳輸, initiator測量發(fā)射信號和接收信號之間的相位變化。
未編碼的窄帶恒定包信號可以使用單個天線發(fā)送或接收,以便支持標(biāo)準低功耗藍牙芯片。
03 5G定位技術(shù)
5G定位即用5G信號實現(xiàn)定位功能的技術(shù),其核心思想是復(fù)用當(dāng)前的5G基礎(chǔ)設(shè)施,而不增加額外的布網(wǎng)成本,從而讓5G在實現(xiàn)高性能連接能力的基礎(chǔ)之上,再增加較高的精準定位能力(定位精度亞米級)。
從5G定位原理的角度來看,定位技術(shù)大致可以分為三種類型:基于三角關(guān)系和運算的定位技術(shù)、基于場景分析的定位技術(shù)和基于臨近關(guān)系的定位技術(shù)。
基于三角關(guān)系的定位技術(shù)
這種定位技術(shù)根據(jù)測量得出的數(shù)據(jù),利用幾何三角或雙曲線關(guān)系計算被測物體的位置,它是最主要的、也是應(yīng)用最為廣泛的一種定位技術(shù)。
基于場景分析的定位技術(shù)
這種定位技術(shù)對定位的特定環(huán)境進行抽象和形式化,用一些具體的、量化的參數(shù)描述定位環(huán)境中的各個位置,并用一個數(shù)據(jù)庫把這些信息集成在一起。業(yè)界習(xí)慣上將上述形式化和量化后的位置特征信息形象地稱為信號“指紋”。觀察者根據(jù)待定位物體所在位置的“指紋”特征查詢數(shù)據(jù)庫,并根據(jù)特定的匹配規(guī)則確定物體的位置。
基于臨近關(guān)系的定位技術(shù)
基于臨近關(guān)系進行定位的技術(shù)原理是:根據(jù)待定位物體與一個或多個已知位置參考點的臨近關(guān)系來定位。這種定位技術(shù)通常需要標(biāo)識系統(tǒng)的輔助,以唯一的標(biāo)識來確定已知的各個位置。這種定位技術(shù)最常見的例子是移動蜂窩通信網(wǎng)絡(luò)中的Cell ID。假設(shè)待定位物體分別位于三個Cell中。由于各個Cell中參考點的位置已知,所以根據(jù)待定位物體所在Cell可以粗略確定其位置(即Cell中參考點的位置)。
04 聲波定位技術(shù)分析
基于音頻信號的室內(nèi)定位技術(shù),具有成本低、精度高、兼容性好的特點,非常適合消費級智能手機的室內(nèi)定位場景。直接使用智能手機內(nèi)置的麥克風(fēng),無需增加額外的設(shè)備。
可擴展至智能手機的音頻定位系統(tǒng)可以大致分為兩大類:基于音頻信號 TOA 和 TDOA 的定位系統(tǒng)。
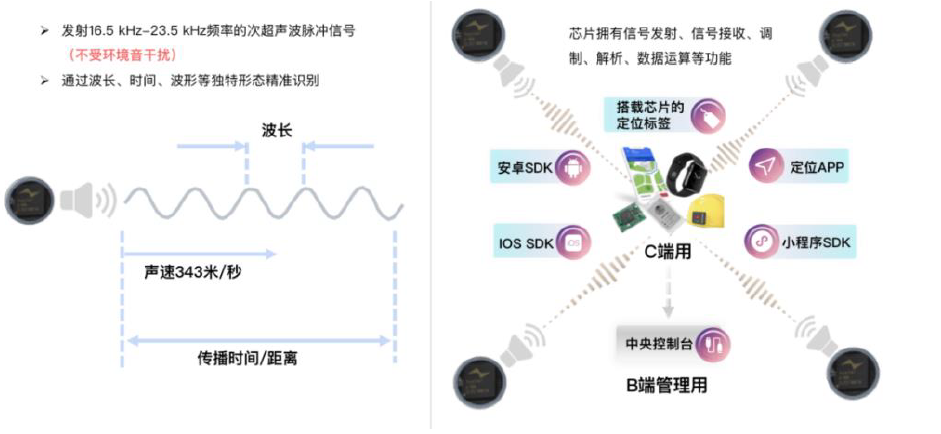
音頻定位原理
基于音頻的室內(nèi)定位技術(shù)利用聲學(xué)器件如麥克風(fēng)、揚聲器實現(xiàn)定位具有如下特點:
1、精準定位:定位精度可達分米級(0.5-1m);
2、維護方便:基站通電即可用,單基站可覆蓋 30-50 米 ;
3、由于音頻的傳播速度遠低于射頻,實現(xiàn)高精度的音頻定位對時鐘的同
步精度要求不高;
4、對于位置服務(wù)提供商,雖然實現(xiàn)音頻定位需要在室內(nèi)布設(shè)音頻節(jié)點,但由于商用音頻元器件的成本低廉,有望通過低成本的基礎(chǔ)設(shè)施投入,實現(xiàn)室內(nèi)的高精度定位(分米級);
5、對于用戶,麥克風(fēng)和揚聲器是手持智能移動終端的標(biāo)配,可在無需用戶額外開銷的情況下提供高精度的位置服務(wù);
6、不限用戶容量:采用類似衛(wèi)星導(dǎo)航系統(tǒng)的廣播模式,基站和終端無需交互,不限用戶容量;
7、數(shù)據(jù)安全:終端側(cè)解算,基站不主動掃描用戶信息。
05 室內(nèi)北斗定位技術(shù)分析
室內(nèi)北斗顧名思義,就是在室內(nèi)有遮擋環(huán)境中的北斗衛(wèi)星定位技術(shù)。眾所周知,目前全球幾大GNSS定位系統(tǒng)已經(jīng)很完善,但是GNSS有個致命的弱點,就是地面如果有遮擋就沒有信號,在這樣的市場條件下,在室內(nèi)定位場景中的北斗定位技術(shù)(也叫偽衛(wèi)星)就應(yīng)運而生。
大致原理是在室內(nèi)場景模擬真實導(dǎo)航衛(wèi)星信號,讓所有的衛(wèi)星導(dǎo)航終端實現(xiàn)在導(dǎo)航衛(wèi)星信號盲區(qū)(室內(nèi)、地下、隧道、高架下等)的定位導(dǎo)航,在同源信號下實現(xiàn)無縫銜接室內(nèi)外導(dǎo)航系統(tǒng),實現(xiàn)室內(nèi)外一體化高精度定位導(dǎo)航。
主要的產(chǎn)品有:北斗衛(wèi)星微型基站及配套天線,標(biāo)簽產(chǎn)品與現(xiàn)有的北斗終端產(chǎn)品完全復(fù)用。
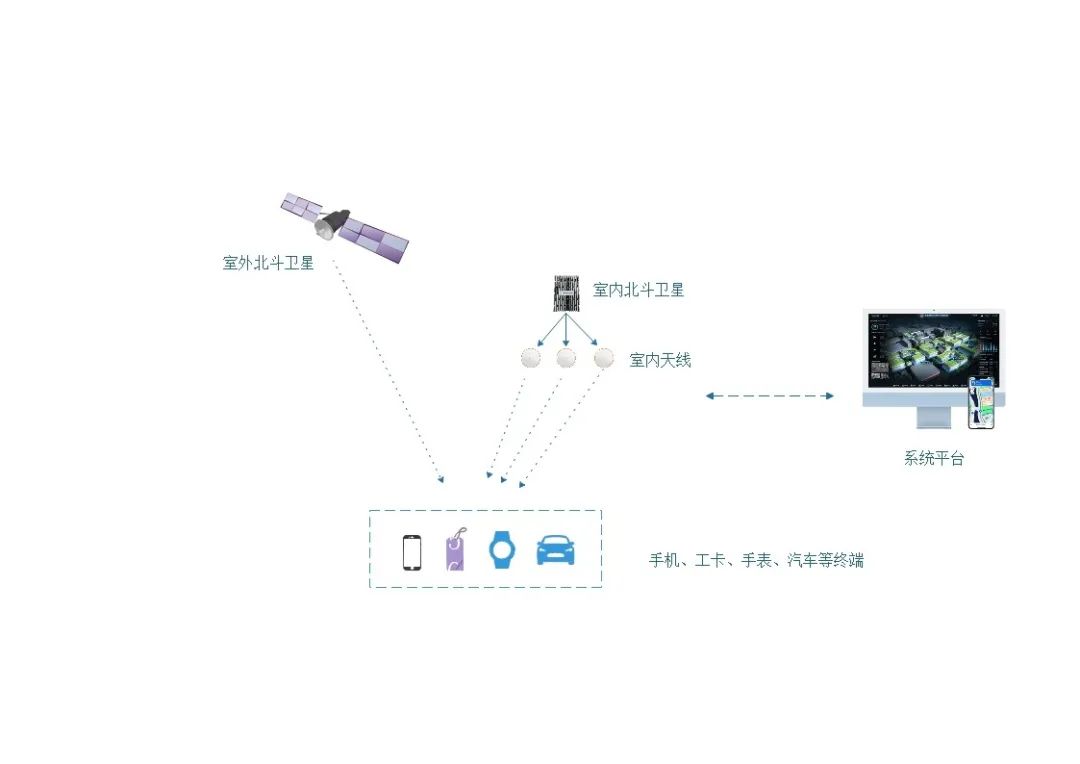
室內(nèi)北斗技術(shù)原理圖
06 地磁技術(shù)分析
地磁場在地球近地空間連續(xù)分布,受地球磁性物質(zhì)分布不同,各個地域的地磁場存在差異。地磁場已廣泛應(yīng)用于艦船和飛機的方位導(dǎo)航,利用指南針、磁羅盤等測量地磁場方位信息,以獲得穩(wěn)定的地球北指向。
與磁航向測量技術(shù)不同,地磁定位技術(shù)利用地磁場強度隨地理空間位置變化具有不同分布的特性,實現(xiàn)對運動載體的定位。通過安裝在運動載體上的磁場傳感器,實時測量運動航跡(軌跡)上的地磁場數(shù)據(jù),并提取磁場特征,與事先獲得并存儲的地磁場模型或地磁圖進行匹配,以確定運動載體的實時位置,用于導(dǎo)航或者定位跟蹤。
因為地磁場的廣泛分布,地磁定位技術(shù)可以應(yīng)用于飛行器、地面車輛、水下潛航器等不同的運動載體,特別在建筑內(nèi)等封閉空間內(nèi),除了地球磁場外,人工建筑的鐵磁性材料進一步豐富了地磁場的空間分布特征,使磁場的空間差異分辨率可達到10cm,為室內(nèi)位置測量提供了一個天然的坐標(biāo)系。
在使用磁場定位技術(shù)前,需要采集定位區(qū)域的磁場分布,并把采集過的磁場分布制作成地磁圖;當(dāng)來到有地磁圖的區(qū)域時,通過運動體攜帶(或安裝)定位終端內(nèi)的磁傳感器,測量運動體經(jīng)過區(qū)域的磁場,將實際測量的磁場數(shù)據(jù)與已知的地磁圖進行對比,在地磁圖內(nèi)找到和測量磁場數(shù)據(jù)最相似的數(shù)據(jù)所在的位置,即是運動體所在的位置。
從上述定位原理看出,地磁定位的最大優(yōu)勢是不依賴于外部環(huán)境、不需要事先部署硬件、不需要維護、可以分辨樓層、不易受遮擋和干擾,能夠取得定位精度、成本、可靠性和兼容性的良好平衡,具有非常廣闊的市場應(yīng)用前景。
但是,要實現(xiàn)穩(wěn)定高精度的地磁定位性能,并不是一件容易的事情,除了需要重點考慮四個方面的因素:第一,地磁圖的制作和定位特征的應(yīng)用;第二,選擇適合的磁傳感器;第三,與磁傳感器和運動載體相適配的實時測量方法;第四,與應(yīng)用場景和運動載體相適配的定位算法。
07 Wi-Fi定位技術(shù)分析
Wi-Fi指紋定位原理:
基于Wi-Fi指紋的定位,其主要思想是將難以直接測量的位置信息與容易直接測量的Wi-Fi信號,形成一種映射關(guān)系。主要基于以下兩個基本假設(shè):
第一:無線信號指紋特征與地理位置相關(guān)。理想情況下,Wi-Fi覆蓋的室內(nèi)環(huán)境中每一個地理位置中的無線信號指紋特征都是唯一的,可以用來進行位置區(qū)分。Wi-Fi指紋的差異性越大,定位系統(tǒng)的定位精度就越高。理想情況下只考慮Wi-Fi指紋特征與位置信息的關(guān)系,而不考慮人員的移動、溫度的變化、移動終端的差異以及采樣時間等因素對Wi-Fi指紋的影響。
第二:不同采樣點之間的Wi-Fi指紋的匹配度與它們之間距離的遠近具有很大關(guān)系。在離線訓(xùn)練階段,采集部分特定參考點的Wi-Fi指紋,由于采集的Wi-Fi指紋數(shù)量有限,不可能覆蓋所有的室內(nèi)位置,在在線定位階段,用戶的位置也不會正好處于采集的離線指紋中間,因此需要利用近鄰參考點來估計用戶的位置。無線信號的衰減特性,可以保證相鄰位置的無線信號差異不會太大,但是在具體的室內(nèi)環(huán)境中,由于墻壁的阻隔、人員的移動、信號傳播的多徑效應(yīng)等因素的影響,也可能出現(xiàn)實際位置相近的兩個指紋,但它們的匹配度很低,或者實際位置比較遠的兩個指紋(比如處于不同的樓層),它們的匹配程度卻比較高。
基于Wi-Fi指紋的定位算法原理如圖所示。
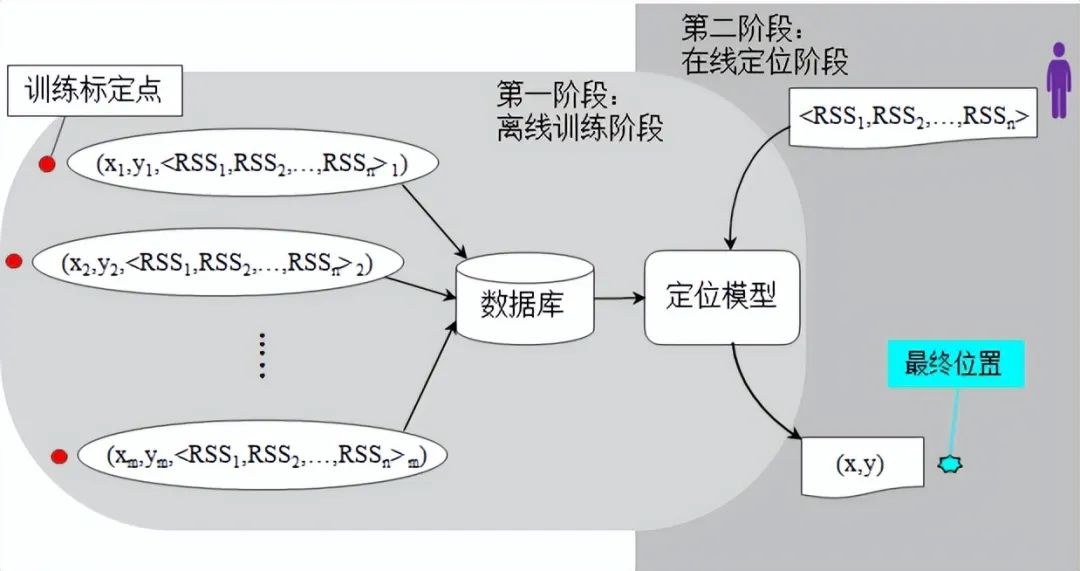
Wi-Fi指紋定位算法原理圖
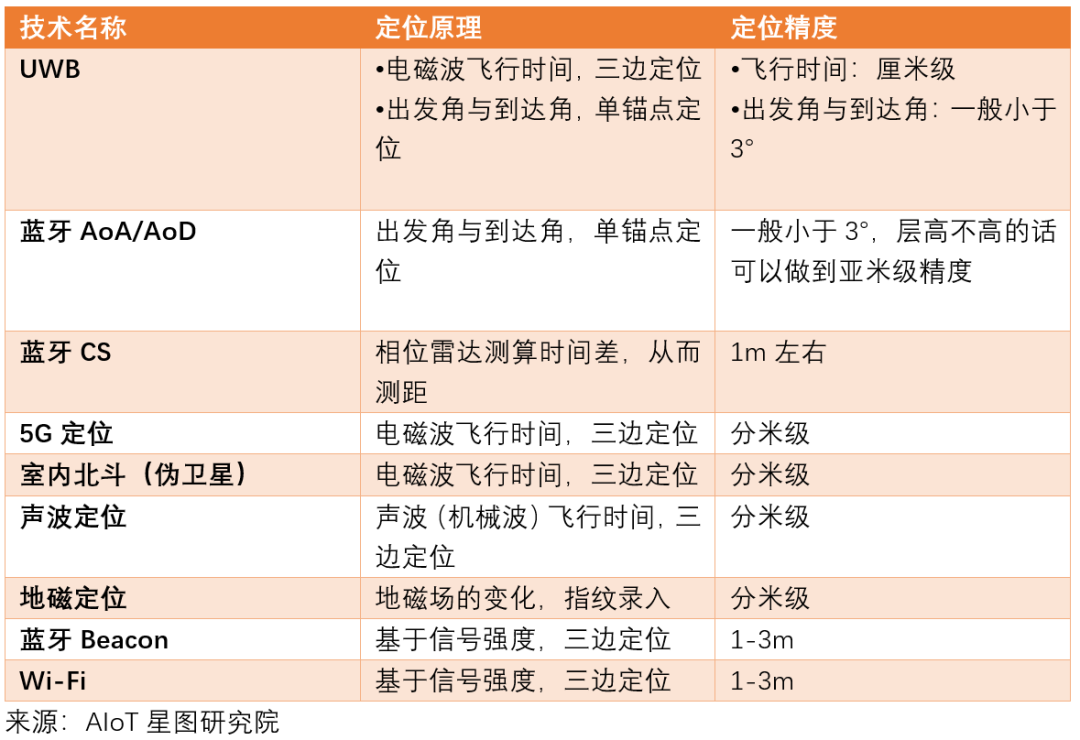
前面較為詳細的介紹了市場上常見的高精度定位技術(shù),為了方便讀者匯總與記憶,我們將每種定位技術(shù)的優(yōu)缺點做成了一個匯總表格:
常見的高精度定位技術(shù)介紹表
審核編輯:湯梓紅
-
藍牙
+關(guān)注
關(guān)注
114文章
5775瀏覽量
169873 -
定位技術(shù)
+關(guān)注
關(guān)注
7文章
284瀏覽量
25341 -
UWB
+關(guān)注
關(guān)注
32文章
1084瀏覽量
61031
原文標(biāo)題:進高精度定位賽道的坑,你需要懂多少種技術(shù)?
文章出處:【微信號:ulinkmedia,微信公眾號:物聯(lián)傳媒】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
青越鋒是否能取代Protel在中國市場上的地位?
當(dāng)前市場上手機移動電源類型有哪些?
智能手表市場上還未解決的技術(shù)問題
請問市場上最穩(wěn)定的無線監(jiān)控信號傳輸方式是什么?
產(chǎn)品在市場上失敗的11個原因
國內(nèi)市場上為什么沒有高顯色室內(nèi)照明光源銷售呢?
現(xiàn)在市場上無線充電手機有哪些?
汽車安全系統(tǒng)在市場上已呈現(xiàn)應(yīng)用熱潮
介紹幾款GPS市場上受到應(yīng)用的芯片
市場上幾種常見的測量長度的工業(yè)儀器
目前市場上的UWB定位企業(yè)有哪些
行業(yè)市場上最聰明的設(shè)備開源






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論