 VADv2:基于概率性規劃的端到端自動駕駛
VADv2:基于概率性規劃的端到端自動駕駛
16km路線無后處理端到端閉環
概率性規劃
不同于感知,規劃中存在著更多的不確定性,對于同一場景,存在不同的合理的決策規劃結果。環境信息到決策規劃不存在明確的映射關系,因此學習擬人的駕駛策略極具挑戰性。以往的基于學習的規劃方法確定性地通過MLP回歸出規劃軌跡,無法應對環境信息和決策規劃之間不明確的映射關系。同時基于神經網絡輸出的軌跡無法保證滿足運動學約束,仍需要后端的軌跡優化。
VADv2采用概率性規劃的方法,從大量的人類駕駛數據中,擬合每一時刻基于環境信息的自車軌跡概率分布,將問題轉化為預測每一條軌跡和環境信息的相關性,從而應對規劃中的不確定性。
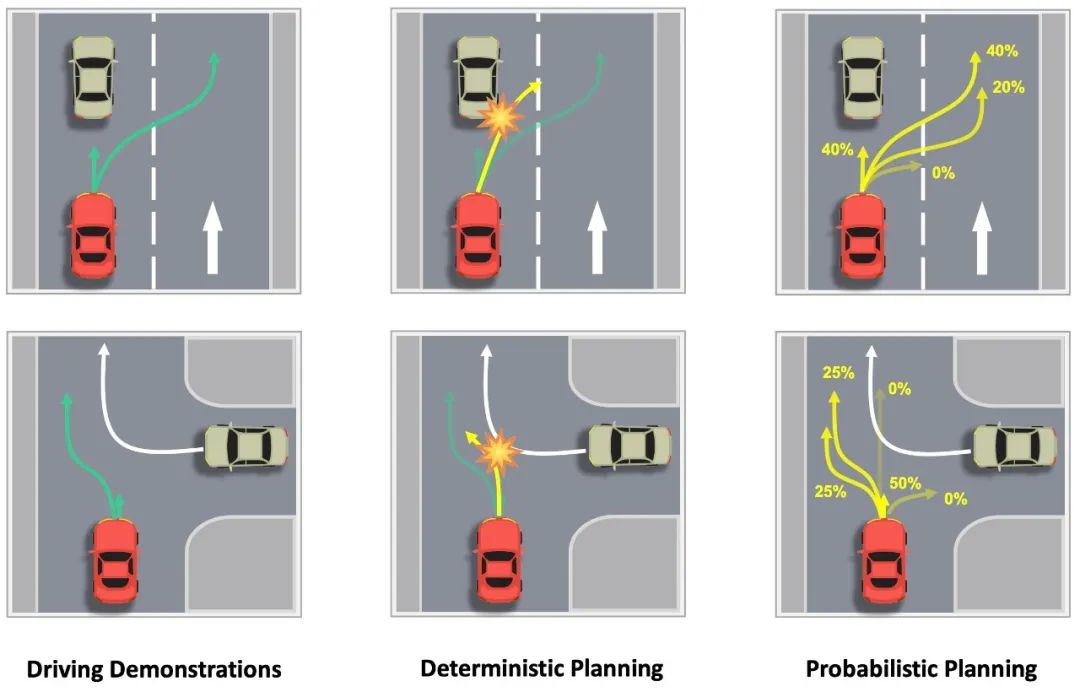
圖1 規劃中的不確定性
算法框架
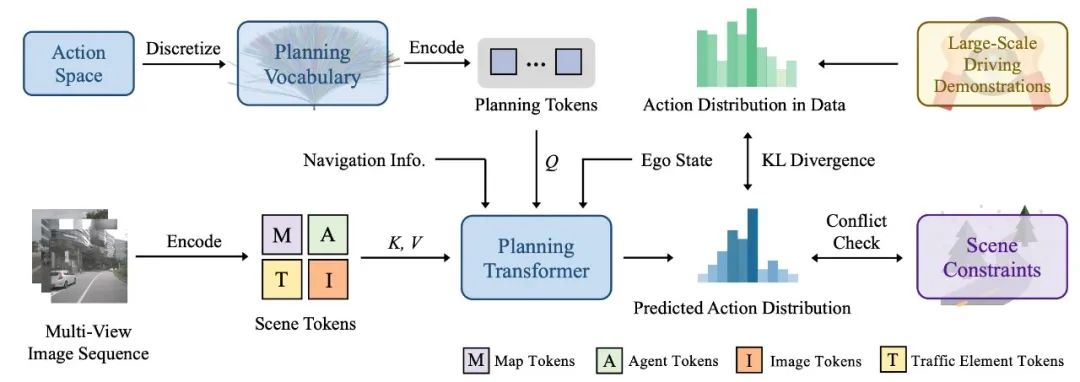
圖2 VADv2 算法框架
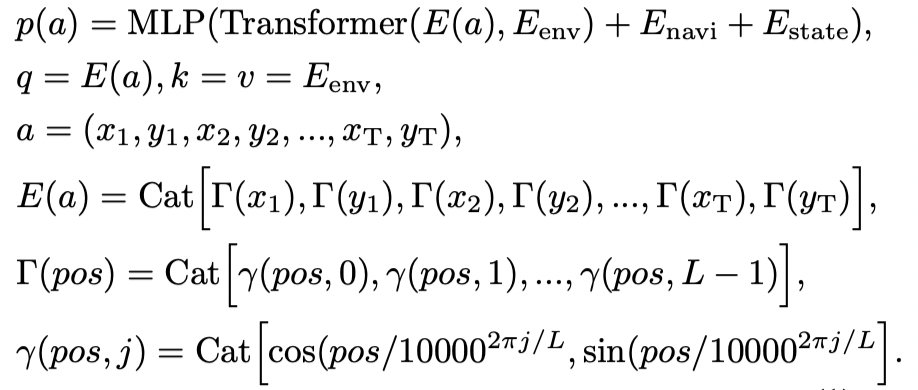
如圖2所示,VADv2以車載相機采集的流式圖像序列作為輸入。鑒于圖像信息稀疏性,VADv2將圖像信息轉換為具有高層語義信息的tokens。具體地,VADv2基于MapTRv2從環視圖像數據中提取地圖物理層和邏輯層的map tokens,同時從圖像中提取關于動態障礙物的agent tokens和交通信號燈的traffic element tokens。此外,由于在連續的動作空間上學習概率分布較為困難,VADv2將動作空間離散化,通過最遠軌跡采樣的方式從真實的軌跡數據中篩選出N條軌跡構建軌跡集合,用于表征整個動作空間。VADv2將軌跡通過正余弦編碼方式編碼為planning tokens。Planning tokens基于堆疊的Transformer結構與包含環境信息的tokens交互,同時結合稀疏導航信息和自車狀態信息,輸出每一條軌跡的概率:
在訓練階段,VADv2通過KL散度約束預測的概率分布和駕駛數據對應分布之間的一致性,并引入額外的場景約束進一步降低存在安全風險的軌跡的概率。在推理階段,VADv2在每一個時刻從軌跡概率分布中采樣一條高置信度的軌跡用于車輛控制。由于輸出多模式的軌跡簇,VADv2也可以和基于優化或規則的規控架構結合,進行二階段優化以及篩選過濾。
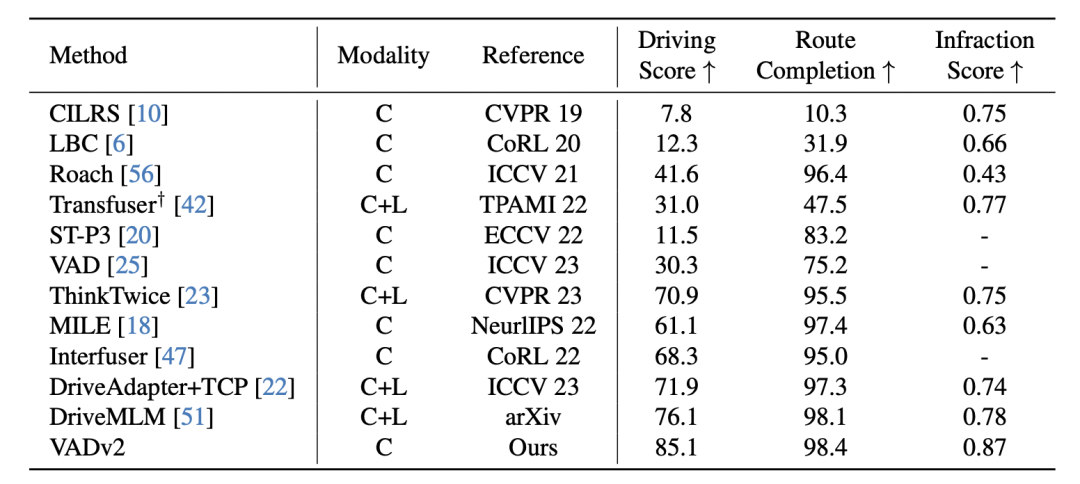
圖3 CARLA閉環規劃性能
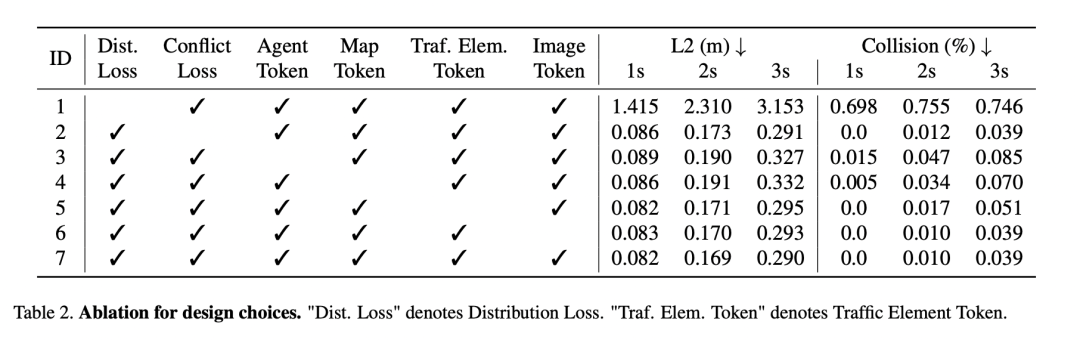
圖4 消融實驗
閉環驗證
在CARLA仿真器上,VADv2能夠長時間控車穩定地行駛,正確地響應交通信號燈,通過復雜路口,與其他車輛和行人交互,剎停避障等。同時,VADv2也在Town05 Benchmark上取得了顯著優于其他方法的閉環性能(圖3)。消融實驗如圖4所示,驗證了各類token隱式表征和概率分布約束的有效性。
總結與展望
在CARLA仿真器上的閉環實驗初步驗證了該范式的可行性。未來的研究方向是如何與現有的規控架構結合進一步提升系統的魯棒性,以及在更加復雜的真實場景中展開驗證。
審核編輯:湯梓紅
-
算法
+關注
關注
23文章
4601瀏覽量
92677 -
仿真器
+關注
關注
14文章
1016瀏覽量
83647 -
自動駕駛
+關注
關注
783文章
13694瀏覽量
166167
原文標題:開發者說 | VADv2:基于概率性規劃的端到端自動駕駛
文章出處:【微信號:horizonrobotics,微信公眾號:地平線HorizonRobotics】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
自動駕駛真的會來嗎?
自動駕駛的到來
自動駕駛技術的實現
端到端自動駕駛到底是什么?

基于矢量化場景表征的端到端自動駕駛算法框架

理想汽車自動駕駛端到端模型實現

佐思汽研發布《2024年端到端自動駕駛研究報告》
智行者聯合清華完成國內首套全棧式端到端自動駕駛系統的開放道路測試

理想汽車加速自動駕駛布局,成立“端到端”實體組織

Mobileye端到端自動駕駛解決方案的深度解析







 工商網監
工商網監
評論