 GD32 MCU碰到IIC總線卡死怎么辦?
GD32 MCU碰到IIC總線卡死怎么辦?
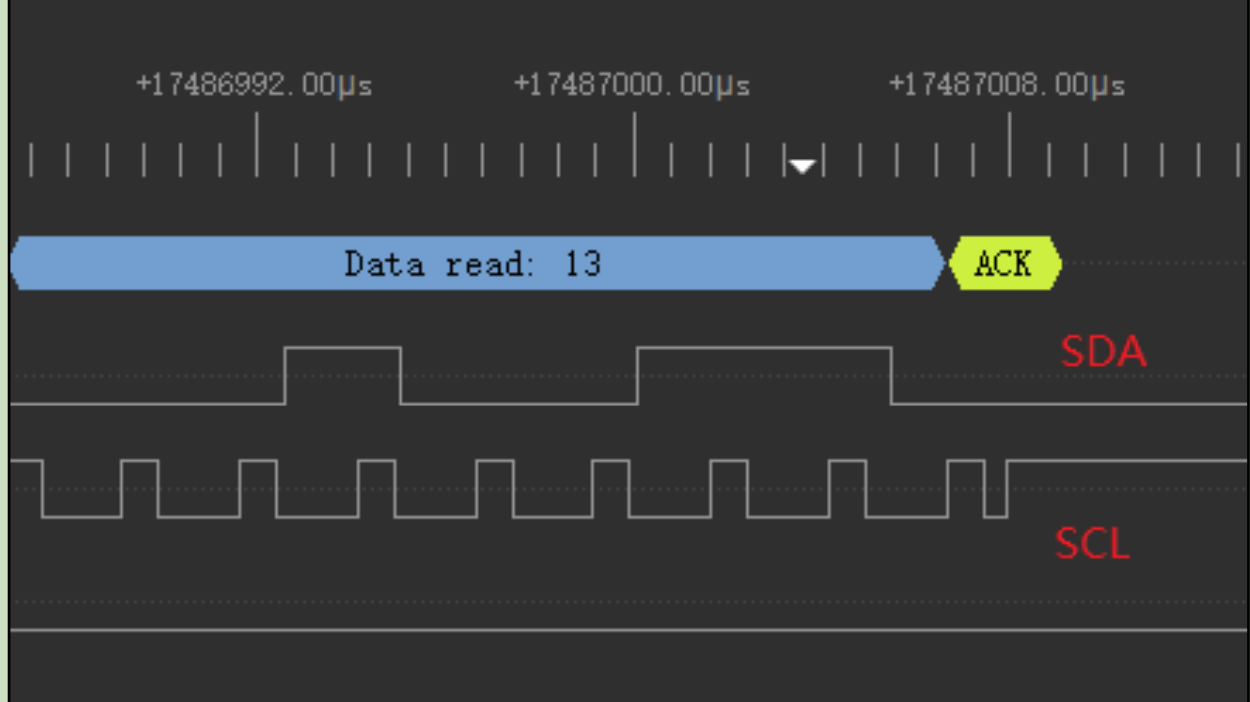
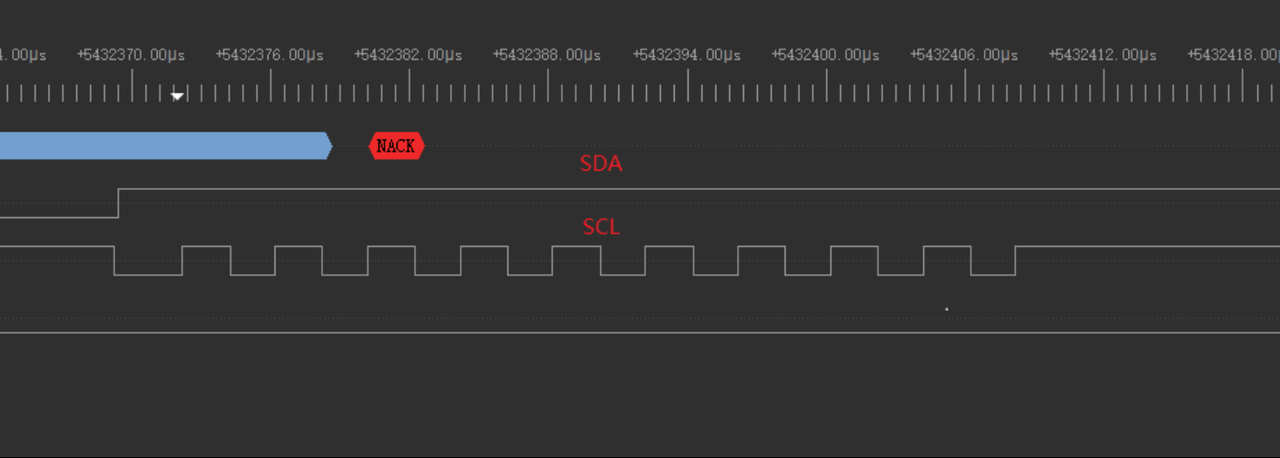
大家在使用MCU IIC通信時,若碰到設備復位或者總線干擾等情況,可能會導致IIC總線卡死,表現上總線上SDA或者SCL其中一根線為低電平,IIC總線一直處于busy狀態。此時若代碼上一直等待總線空閑,則可能導致軟件死機,為解決該問題,本視頻提供了軟件配置釋放IIC總線的方法。
首先為大家介紹發生IIC總線卡死的兩種情況:(1)主機在發送 START 信號后, 控制 SCL 產生 8 個時鐘脈沖,然后拉低 SCL 信號為低電平,在這個時候,從設備輸出應答信號,將 SDA 信號拉為低電平。如果這個時候主機異常復位, SCL 就會被釋放為高電平。此時,如果從機沒有復位,就會繼續 I2C 的應答,將 SDA一直拉為低電平,直到 SCL 變為低電平,才會結束應答信號。 而由于 I2C 主機復位后檢測總線的狀態,如果 SDA 信號為低電平,則 I2C 總線被占用,會一直等待 SCL 和 SDA信號變為高電平,因此,在 I2C 主機等待從機釋放 SDA 信號時, I2C 從機又在等待主機將 SCL 信號拉低以釋放應答信號,兩者相互等待, I2C 總線進入死鎖狀態 ;(2)主機在發送 START 信號后, 控制 SCL 產生 8 個時鐘脈沖,然后拉低 SCL 信號為低電平,在這個時候,從設備輸出應答信號,將 SDA 信號拉為低電平。如果這個時候主機異常復位, SCL 就會被釋放為高電平。此時,如果從機沒有復位,就會繼續 I2C 的應答,將 SDA一直拉為低電平,直到 SCL 變為低電平,才會結束應答信號。 而由于 I2C 主機復位后檢測總線的狀態,如果 SDA 信號為低電平,則 I2C 總線被占用,會一直等待 SCL 和 SDA信號變為高電平。因此,在 I2C 主機等待從機釋放 SDA 信號時, I2C 從機又在等待主機將 SCL 信號拉低以釋放應答信號,兩者相互等待, I2C 總線進入死鎖狀態 。
以下為兩種復位IIC總線卡死的軟件方法,大家可以嘗試使用:
(1)將SDA和SCL配置為推挽輸出,強制輸出stop信號
在 I2C 主機復位后,主機檢測 I2C 總線一直為 BUSY 狀態,且超過設定的時間,則總線被鎖死。可通過將 I2C 的 SCL 和 SDA 引腳初始化成普通 GPIO 功能,配置成推挽輸出。 先拉高SCL 信號,在拉高 SDA 信號,模擬產生一個 STOP 信號,然后再配置為 I2C 的引腳復用功能。配置代碼如下所示。
/*! \brief reset i2c bus \param[in] none \param[out] none \retval none */ void i2c_bus_reset() { GPIO_BC(GPIOB) |= GPIO_PIN_6 | GPIO_PIN_7; gpio_init(GPIOB, GPIO_MODE_OUT_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_6|GPIO_PIN_7); __nop(); __nop(); __nop(); __nop(); __nop(); GPIO_BOP(GPIOB) |= GPIO_PIN_6; __nop(); __nop(); __nop(); __nop(); __nop(); GPIO_BOP(GPIOB) |= GPIO_PIN_7; gpio_init(GPIOB, GPIO_MODE_AF_OD, GPIO_OSPEED_50MHZ, GPIO_PIN_6 | GPIO_PIN_7); } /*! \brief check the I2C is or not busy \param[in] none \param[out] none \retval none */ void check_bus_status(void) { while(i2c_flag_get(I2C0,I2C_FLAG_I2CBSY)) { if(--time_out == 0){ i2c_bus_reset(); } } }

(2)將SCL配置為推挽輸出,強制輸出9個clk
在 I2C 主機中增加 I2C 總線恢復程序。每次 I2C 主設備復位后,如果檢測到 SDA 數據線被拉低,則控制 I2C 中的 SCL 時鐘線產生 9 個時鐘脈沖(針對 8 位數據的情況),這樣 I2C 從設備就可以完成被掛起的操作,從死鎖狀態中恢復過來。
I2C 主機通過將 SCL 引腳初始化為普通 GPIO 功能,配置成推挽輸出。保證連續發送 9 個時鐘脈沖,為保證后續 I2C 正常通信,先將 I2C 模塊復位,再置位,最后再配置為 I2C 的引腳復用功能。配置代碼如下所示。
/*! \brief reset i2c bus \param[in] none \param[out] none \retval none */ void i2c_bus_reset() { uint8_t I = 0; gpio_init(GPIOB, GPIO_MODE_OUT_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_6); /* SCL output clock signal */ for(I = 0; I < 10; i++){ gpio_bit_reset(GPIOB, GPIO_PIN_6); delay_1us(2); gpio_bit_set(GPIOB, GPIO_PIN_6); delay_1us(2); } /* reset I2C */ i2c_software_reset_config(I2C0, I2C_SRESET_RESET); i2c_software_reset_config(I2C0, I2C_SRESET_SET); gpio_init(GPIOB, GPIO_MODE_AF_OD, GPIO_OSPEED_50MHZ, GPIO_PIN_6 | GPIO_PIN_7); } /*! \brief check the I2C is or not busy \param[in] none \param[out] none \retval none */ void check_bus_status(void) { while(i2c_flag_get(I2C0,I2C_FLAG_I2CBSY)) { if(--time_out == 0){ i2c_bus_reset(); } } }
如有其他問題或建議,歡迎評論區討論。
-
單片機
+關注
關注
6032文章
44525瀏覽量
633245 -
mcu
+關注
關注
146文章
17019瀏覽量
350372 -
脈沖
+關注
關注
20文章
886瀏覽量
95562 -
IIC
+關注
關注
11文章
300瀏覽量
38277
發布評論請先 登錄
相關推薦
GD32 MCU進入低功耗模式導致無法再進行程序下載怎么辦?
GD32 MCU 入門教程】GD32 MCU 常見外設介紹(12)FMC 模塊介紹

GD32的MCU介紹
兆易創新GD32 MCU選型手冊,適用于GD32全系列MCU


不同型號的GD32 MCU如何區分?
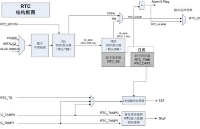
【GD32 MCU 入門教程】GD32 MCU 常見外設介紹(14)RTC 模塊介紹

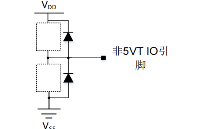
【GD32 MCU入門教程】GD32 MCU GPIO 結構與使用注意事項





 工商網監
工商網監
評論