 如何在三天內實現高性能伺服電機驅動控制開發支持EtherCAT/CANopen協議棧
如何在三天內實現高性能伺服電機驅動控制開發支持EtherCAT/CANopen協議棧
完成高性能伺服開發需要熟悉高性能單片機(至少是ARM或DSP****水平的),需要掌握空間磁場矢量控制FOC,需要掌握運動軌跡算法……此外需要花大量的時間進行調試,可能開發出來的性能不盡人意,比如定位不準,速度誤差大,驅動電機發熱嚴重等問題,還有可能反反復復設計P****CB板-調試代碼…….總之短時間開發穩定可靠的伺服驅控系統會比較困難。
** 幸好有了德國T****rinamic** Motion Control一家在嵌入式運動控制領域的全球領導者,將其可靠、穩定的運動控制算法集成在硬件里面,使客戶達到降低成本目的的同時,花最少的時間,最小的工作量開發出可靠,卓越的電機運動控制系統。
** 為了讓工程師現實在三天內完成開發伺服系統的目的,Trinamic開發出一款全球首款片載伺服控制系統的芯片****TMC** M1690-MotionCookie?
面對一些歐美進口品牌伺服產品價格比價高,用戶自己開發對工程師技能要求比較高,對平臺性能要求也比較高的諸多難題,全球嵌入式運動控制領導品牌德國Trinamic推出一款可媲美歐美伺服品牌的低成本芯片級解決方案 - 全球首款伺服片載系統TMCM1690
TMCM1690可以驅動控制三相BLDC、PMSM或單相DC有刷伺服電機。
電機形式包括直線伺服電機、直線音圈電機。支持直線編碼器反饋。
TMCM1690只需要用戶根據自己的電機功率增加外部功率管,便可實現性能卓越的伺服控制系統。TMCM1690內部集成了從電流環、速度環到位置環的PI算法。
TMCM1690集成了ARM微處理器內核,可精確實現力矩/速度/位置控制的FOC算法,以及TMCL/CANopen/EtherCAT COE的應用層協議,此外還可支持程序存儲,實現脫機運行,帶有霍爾/雙編碼器(Encoder1/Encoder2)/限位輸入接口。無需用戶做任何底層的代碼開發,一顆芯片等同于一款高性能伺服控制系統,滿足了即使沒有嵌入式開發經驗的用戶也能實現高性能伺服的開發。
TMCM1690是伺服電機用戶降低成本的最佳選擇方案,滿足用戶三天內實現伺服開發。
Trinamic為TMCM1690提供界面豐富,功能強大的操作軟件TMCL-IDE,用戶只需要通過CAN,RS232,RS485連接上電腦打開TMCL-IDE軟件就可以對伺服電機的力矩,速度和位置實現精確控制,無需再做任何底層軟件開發,直接使用。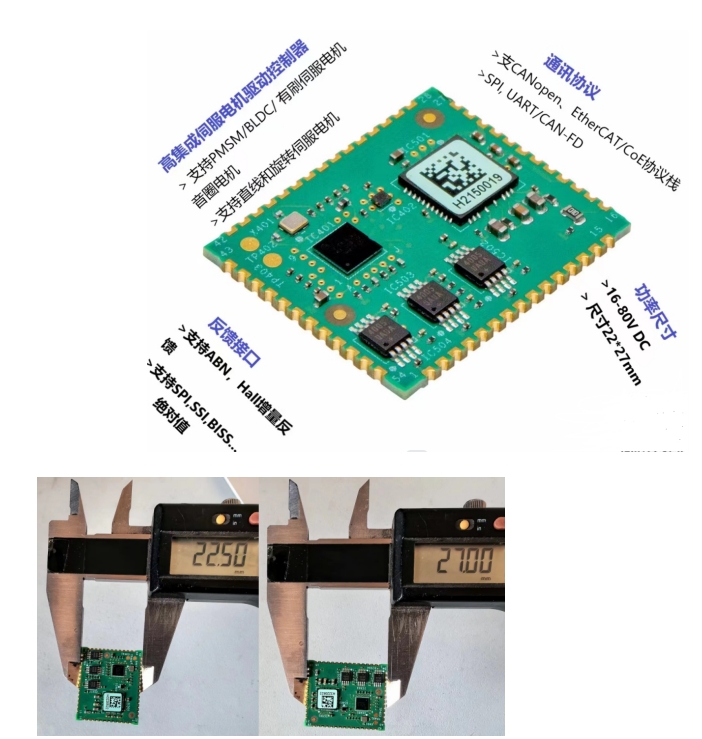

TMCM1690有三款不同的固件,分別為TMCL、CANopen和EtherCAT。如需了解更多信息可加vx:gavysz
n TMCM1690功能介紹
TMCM-1690 是 單 軸 FOC 伺 服 電 機 控 制 模 塊 集 成 預 驅 適 合 三 相 B L D C / P M S M 和 D C 有 刷 伺 服 電 機 , 帶 有 高 達 1.5A 柵 極 驅 動 電 流 和 +60V (+48 V nominal) 供 電 . 提 供 了 UART (RS232-/RS485- ready), CAN 和 EtherCAT? 通訊接口支持TMCL, CANopen, 或 CANopen-over-EtherCAT 通訊協議.
TMCM-1690 支持增量編碼器, 數字霍爾編碼器, 和 絕 對 值 編 碼 器 作 為 位 置 反 饋 。
功能特點:
? 電壓范圍+10 ... +60V DC
? 集 成 齊 全 的 適 合 B L D C / P M S M 、 D C 電 機 的 F O C 伺 服 控制 器 和 柵 極 驅 動
? 0.5A/1.0A/1.5A g柵極驅動電流
? 高 達 120kHz PWM 頻 率
? 板載電流檢測運放
? 支 持 UART (RS232/RS485-ready), CAN 和 EtherCAT? 通訊接口
? 支 持 增 量 編 碼 器 (ABN), 數字HALL sensors, 絕 對 值 SPI編碼器
? 參 考 開 關 輸 入 、剎車、原點信號輸入
? 封 裝 尺 寸 27mm x 22.5mm
功能框圖:
引腳定義: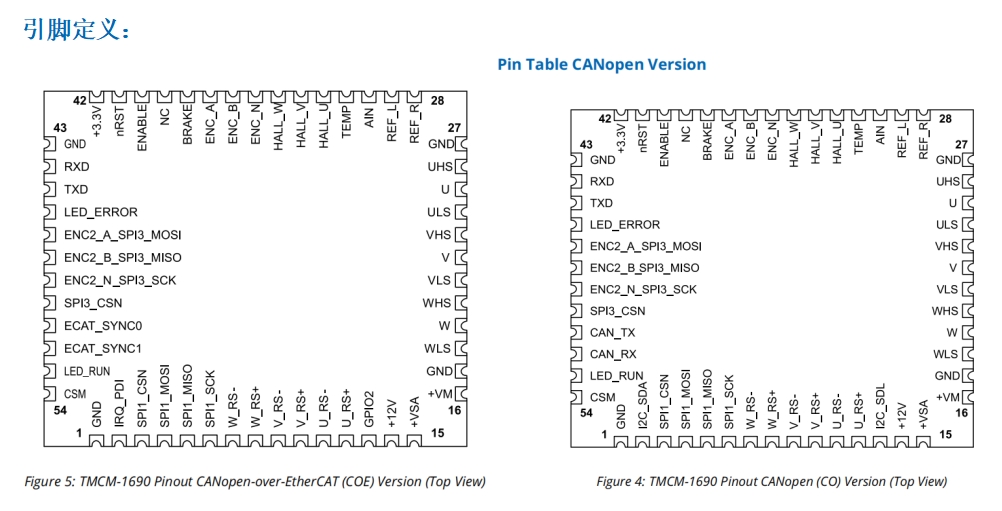
Trinamic為TMCM1690提供2款開源開發板分別為TMCM1690-CAN-EVAL和TMCM1690-ETHERCAT-EVAL版本,如需了解更多信息可加vx:gavysz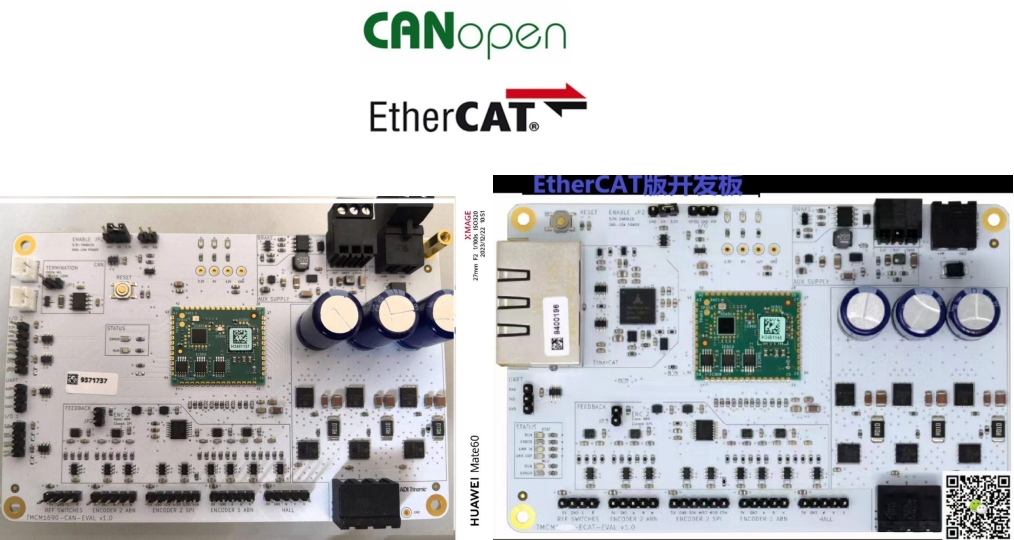
TMCM1690視頻使用教程:BLDC、PMSM伺服電機片載模塊TMCM1690配置方法支持雙編碼器反饋直線電機旋轉電機絕對值編碼器反饋_嗶哩嗶哩_bilibili
TMCM1690視頻介紹:伺服片載EtherCAT,CANopen,RS485,SPI,IIC通訊;支持三相BLDC、PMSM直流有刷直線伺服和音圈電機;霍爾/ABN/SPI編碼器反饋_嗶哩嗶哩_bilibili
-
伺服電機
+關注
關注
85文章
1996瀏覽量
57170 -
CANopen
+關注
關注
8文章
219瀏覽量
43362 -
驅動控制
+關注
關注
0文章
117瀏覽量
15705 -
ethercat
+關注
關注
18文章
549瀏覽量
38191
發布評論請先 登錄
相關推薦
Profinet協議轉換為CanOpen協議來連接CanOpen伺服驅動器的應用
開放式高實時高性能PLC控制器解決方案-基于米爾電子STM32MP135
如何快速開發高性能步進電機控制驅動系統RS485 UART通訊Modebus協議防丟步節能靜音驅動TMCM1290
基于FPGA的Ethercat協議棧 運動控制卡
TMC8670 – 集成EtherCAT通訊和FOC伺服運動控制芯片適用2/3相永磁同步電機

利用CANopen協議實現伺服電機的網絡化控制系統設計

如何三天內完成直流伺服電機系統開發?
高性能EtherCAT伺服驅動的三大優勢
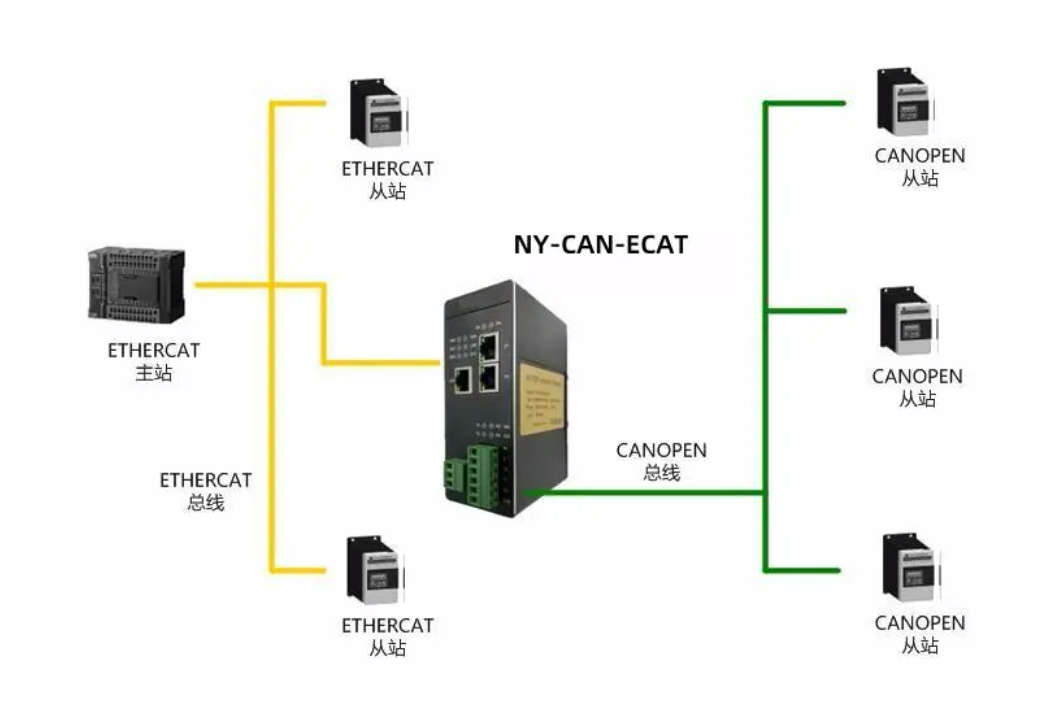
耐用通信Ethercat轉canopen網關在鋼鐵行業的應用案例
Profinet協議轉換為CanOpen協議來連接CanOpen伺服驅動器的應用
EtherCAT從站轉CANopen主站協議網關(JM-ECT-COP)





 工商網監
工商網監
評論