 Nullmax提出多相機3D目標檢測新方法QAF2D
Nullmax提出多相機3D目標檢測新方法QAF2D
今天上午,計算機視覺領域頂會CVPR公布了最終的論文接收結果,Nullmax感知部門的3D目標檢測研究《Enhancing 3D Object Detection with 2D Detection-Guided Query Anchors》入選CVPR 2024,技術實力再獲權威認可。
CVPR(IEEE Conference on Computer Vision and Pattern Recognition)是計算機視覺和模式識別領域的頂級會議,其收錄的論文代表了計算機視覺領域的最新發展方向和最高研究水平。作為計算機視覺領域的世界三大頂會之一,CVPR在全球范圍內有著極其廣泛的影響力和嚴苛的錄用標準。研究成果入選CVPR,也標志著Nullmax的創新成果和前沿技術持續獲得國際頂級會議認可。
論文中,Nullmax提出了一種提升3D目標檢測的新方法QAF2D(Query Anchor From 2D),通過2D檢測結果指導生成3D查詢錨點(Query Anchor),顯著提升了多相機3D目標檢測的性能。同時,Nullmax利用視覺提示(Visual Prompt)設計了一套兩階段的優化方法,讓2D和3D檢測器共用圖像特征提取網絡,在不影響3D檢測器性能的情況下,降低模型訓練和部署的資源消耗。
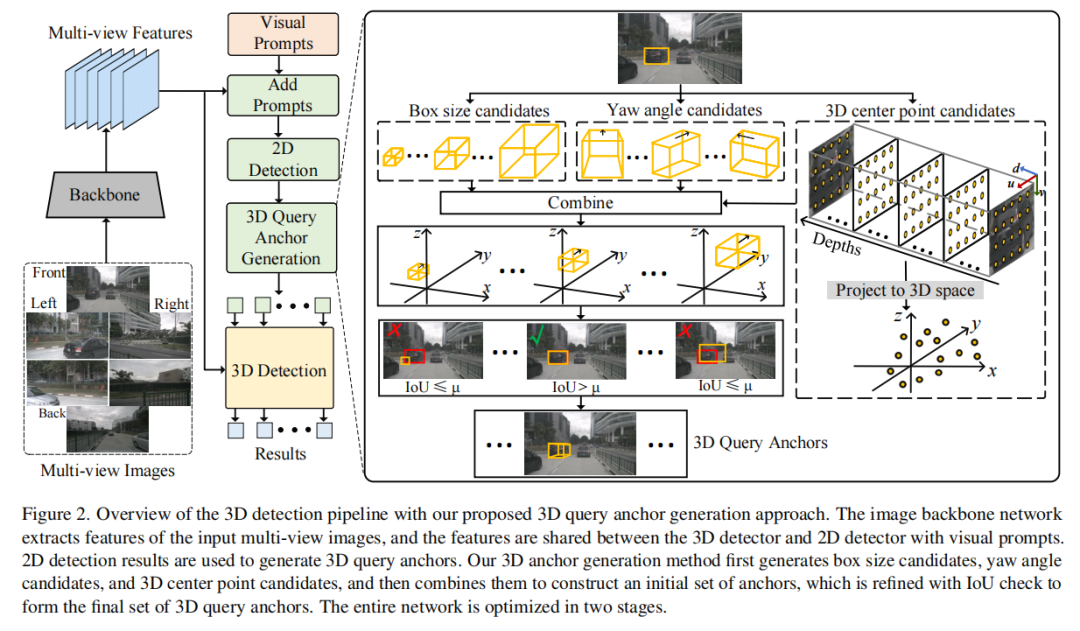
在nuScenes數據集上,Nullmax將QAF2D集成到了三種常見的基于查詢的3D目標檢測器中。實驗結果顯示,QAF2D 方法在 nuScenes 數據集上取得了顯著的性能提升,平均提升 1.18% NDS 和 1.74% mAP,最大提升為 2.3% NDS 和 2.7% mAP。
在自動駕駛當中,3D目標檢測是障礙物檢測等任務的關鍵技術。更好的3D目標檢測性能,可以提升自動駕駛系統的整體表現,尤其是增強系統駕駛的安全性。將QAF2D應用到實際的量產車型上,將可以進一步提升智能駕駛的整體表現,同時降低部署和開發時的硬件資源需求。
作為一家領先的自動駕駛技術企業,Nullmax擁有強大的技術團隊和一流的研發實力,未來Nullmax將繼續探索3D目標檢測的最新技術,不斷提升感知系統的性能和魯棒性,將研究成果應用于實際場景,為自動駕駛技術的落地貢獻力量。
審核編輯:劉清
-
智能駕駛
+關注
關注
3文章
2461瀏覽量
48660 -
計算機視覺
+關注
關注
8文章
1696瀏覽量
45930 -
NDS
+關注
關注
0文章
6瀏覽量
6618 -
自動駕駛系統
+關注
關注
0文章
65瀏覽量
6754
原文標題:入選CVPR 2024!Nullmax 提出多相機3D目標檢測新方法QAF2D
文章出處:【微信號:Nullmax,微信公眾號:Nullmax紐勱】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
Nullmax視覺感知能力再獲國際頂級學術會議認可


奧比中光3D相機打造高質量、低成本的3D動作捕捉與3D動畫內容生成方案

蘇州吳中區多色PCB板元器件3D視覺檢測技術

奧比中光正式發布全新Gemini 330系列雙目3D相機

Stability AI推出Stable Video 3D模型,可制作多視角3D視頻
Adobe提出DMV3D:3D生成只需30秒!讓文本、圖像都動起來的新方法!

高精度彩色3D相機:開啟嶄新的彩色3D成像時代


如何搞定自動駕駛3D目標檢測!






 工商網監
工商網監
評論