 用于機器人觸覺和非接觸距離感知的柔性雙模態傳感器設計
用于機器人觸覺和非接觸距離感知的柔性雙模態傳感器設計
具有非接觸式傳感功能的柔性傳感器的開發仍然是觸覺感知的技術挑戰。對于傳統的非接觸式傳感,通常使用視覺識別和聲學反射檢測。視覺識別檢測更適合長距離檢測,長距離檢測受分辨率限制,通常會被短距離內的其他事物遮擋。聲反射檢測既可以用于短距離檢測,也可以用于長距離檢測,但發射超聲波相對較高的功耗將極大地限制其應用場景。此外,傳統的非接觸式傳感方法通常難以應用于柔性傳感器中。
近期,浙江大學機械306實驗室陳志堅碩士提出了一種新型的柔性雙模態傳感器,該傳感器具有高靈敏度的接觸式壓力傳感和精確的非接觸式距離檢測功能,用于智能機器人感知。相關研究成果總結成論文“Highly sensitive and flexible dual-mode sensor with contact and contactless sensing abilities for robotic perception”,發表在國際期刊 Journal of Intelligent Manufacturing 上。論文研究工作得到了國家自然科學基金、東海實驗室科學基金、中央高校基礎研究基金等項目的資助。
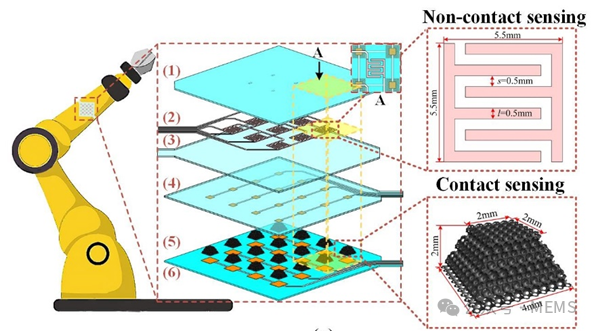
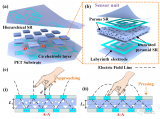
圖1 柔性雙模傳感器的結構示意圖
本文所提出的傳感器結構如圖1所示。柔性傳感器上層為3×3的基于電場檢測原理的平面叉指電極陣列,用于測量非接觸距離信息。下層為4×4的截錐形壓力傳感單元,用于測量外部接觸壓力。兩種感知單元都通過級聯組件和不同的檢測單元嵌套布置進行封裝,目的是減少不同信號之間的干擾。傳感器的工作原理和制造流程如圖2和圖3所示。
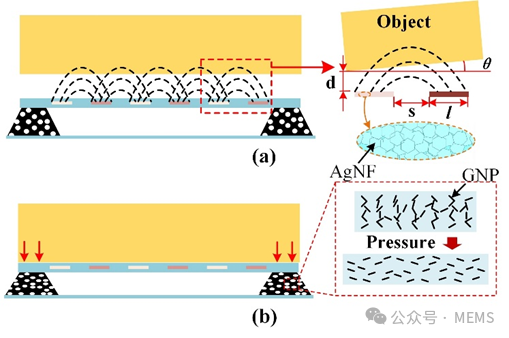
圖2 傳感器的工作原理
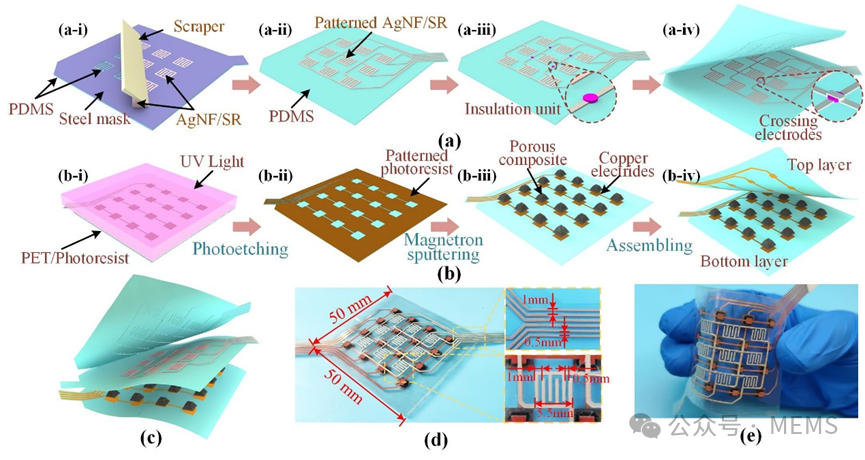
圖3 傳感器制造流程
制備的柔性雙模態傳感器具有0.33V/N的壓力檢測高靈敏度以及5.5N的壓力檢測范圍,4cm內對絕緣物體和導電物體均具有高靈敏距離檢測能力,此外傳感器還具有良好的信號穩定性和可重復性,傳感器的具體信號測試結果分別如圖4和圖5所示。
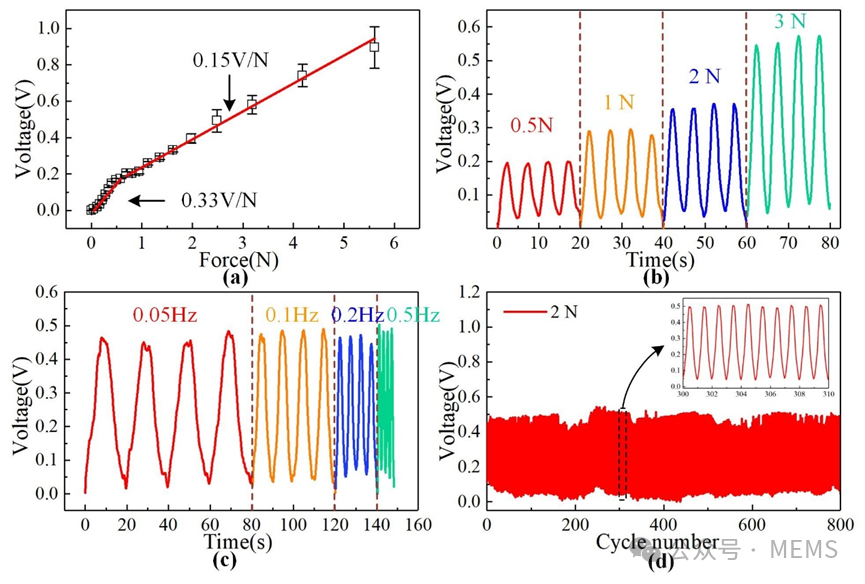
圖4 傳感器壓力感知性能測試結果
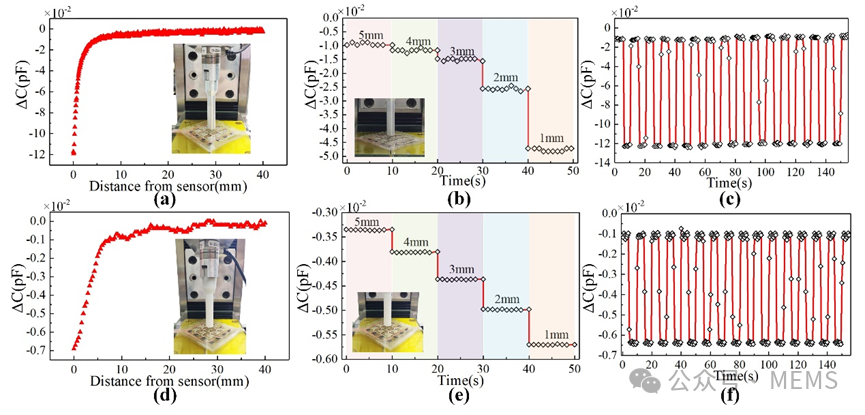
圖5 傳感器接近覺感知性能測試結果
隨后將雙模態傳感器安裝在機械臂上,進行物體的抓取和碰撞檢測實驗,如圖6和圖7的結果表明,該傳感器可以準確測量物體之間的分布接觸力和距離,實現全過程的觸覺感知,所提出的傳感器在機器人操縱和安全工作應用中具有巨大的潛力。
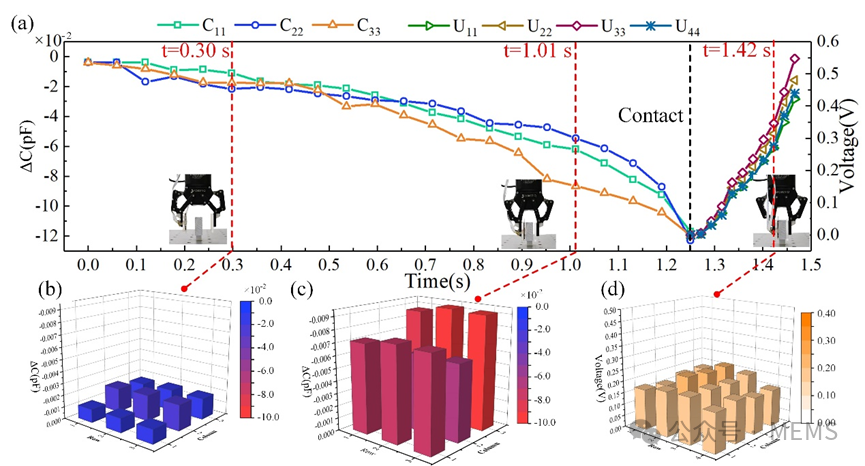
圖6 機器人手完全抓取物體過程中的輸出信號
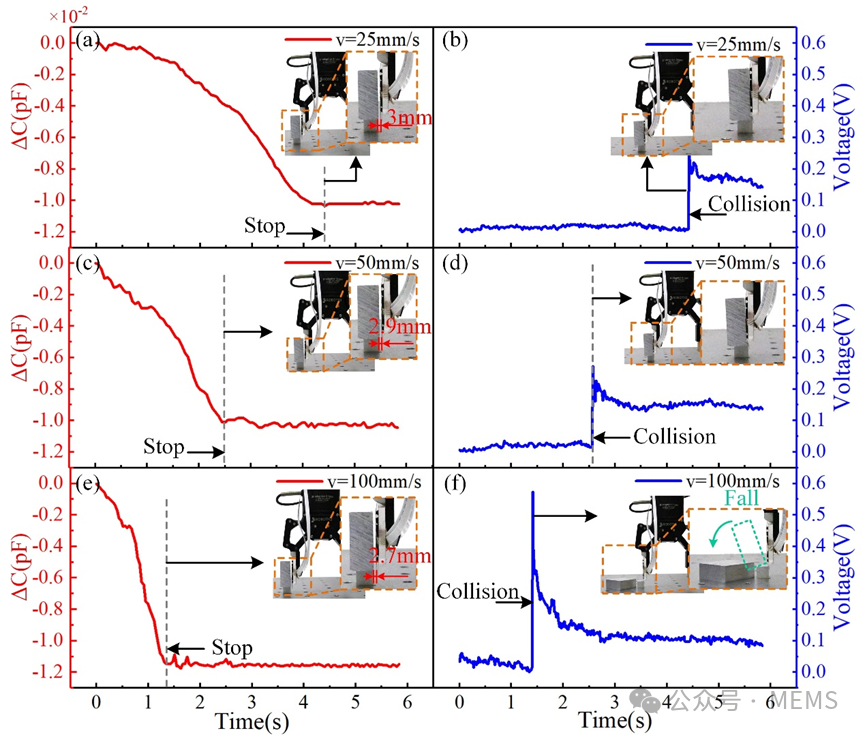
圖7 機器人手臂碰撞測試實驗
審核編輯:劉清
-
傳感器
+關注
關注
2548文章
50664瀏覽量
751945 -
機器人
+關注
關注
210文章
28191瀏覽量
206505 -
柔性傳感器
+關注
關注
1文章
85瀏覽量
3875
原文標題:用于機器人觸覺和非接觸距離感知的柔性雙模態傳感器
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
觸覺傳感器的發展,對機器人產業有什么影響?

柔性電子技術革新與人形機器人的電子皮膚應用前景


人形機器人感知系統的特點:多模態感知、高精度、實時性
可用于機器人觸覺感知的零泊松比柔性傳感器

基于計算設計的超魯棒性應變傳感器,實現軟體機器人的感知和自主性

全面分析:人形機器人快速發展,哪些國產傳感器將受益?(深度報告)

用于機器人物體識別和滑動檢測的磁敏觸覺傳感器

基于非接觸距離與接觸壓力的柔性電容傳感器





 工商網監
工商網監
評論