 愛普生為姿態和振動控制開發理想的IMU
愛普生為姿態和振動控制開發理想的IMU
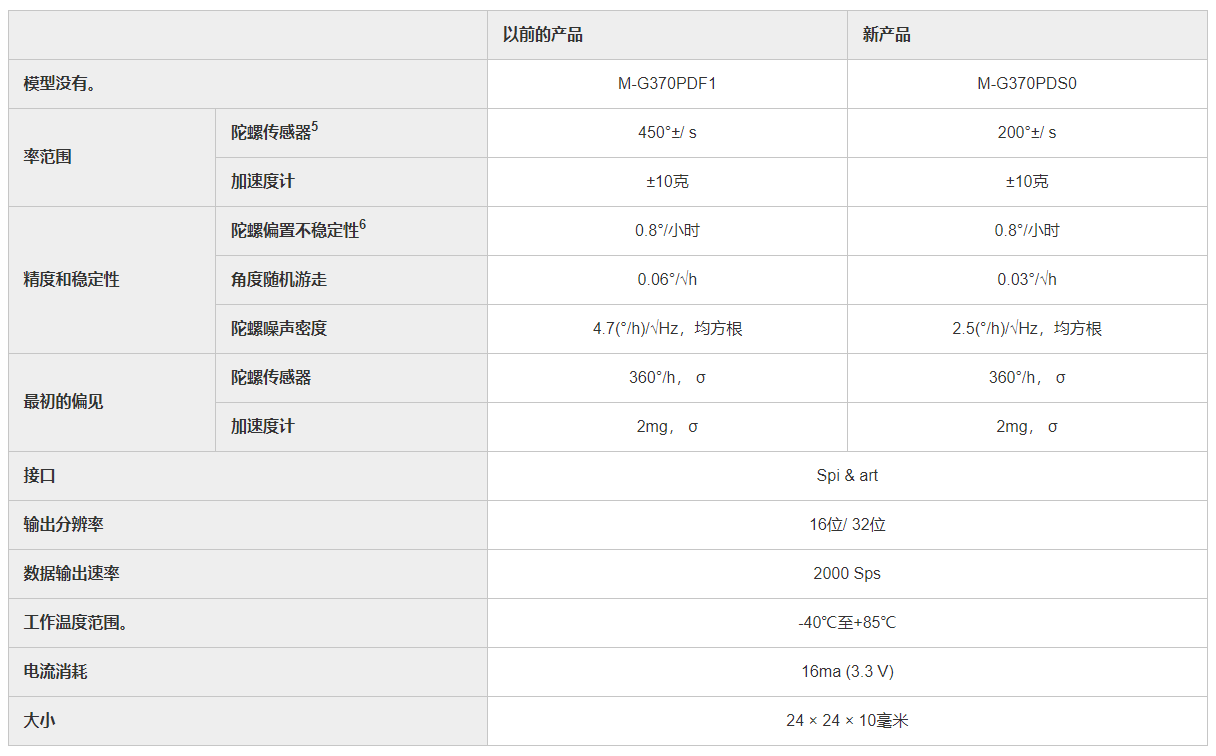
- M-G370PDS0改善了短期噪聲,擴展了型號陣容,使產品選擇范圍更廣-

精工愛普生公司(“愛普生”,TSE: 6724)已經開發出M-G370PDS0樣品,這是一種配備高性能六軸傳感器的新型慣性測量單元(IMU)1。新產品計劃于2022年春季批量生產。
愛普生的imu于2011年首次推出,已在一系列客戶應用中使用,以出色的性能和質量贏得了良好的聲譽。近年來,IMU的應用已經擴展到無人系統的測量、空中和水下視頻攝影等領域,從而產生了對更精確的位置和姿態控制的日益增長的需求。因此,對精度更高的imu的需求正在上升,這對姿態控制至關重要,尤其是噪音性能。M-G370PDS0的角度隨機游走2(輸出的短期變化)為0.03°/√h,是其前身的一半,并且可以更準確地檢測到設備和系統姿態的非常微小的變化,因為它們不會丟失在傳感器噪聲中。這款IMU體積小、重量輕、功耗低,可以幫助客戶將自己的產品做得更小、更輕。新的IMU保持與早期產品(M-G370/365/364/354)的兼容性,使性能升級容易。
產品特性
- 配備低噪聲、高性能傳感器,保持了Epson之前imu 0.03°/√h角度隨機游走的高穩定性噪聲密度:2.5(°/h)/√Hz
- 卓越的動態性能(比例因子非線性),高精度測量,從靜態到高速運動
- 保持與早期imu (M-G370/365/364/354)的兼容性,大幅降低客戶開發成本和評估時間
- 低電流消耗:16ma
產品應用
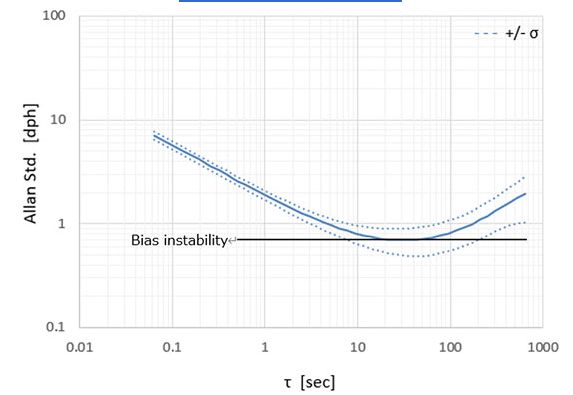
Allan方差是傳感器性能的一個指標,Allan方差表示靜態輸出的穩定性。橫軸表示數據的平均時間,縱軸表示平均值被平均時間分隔后的分布。已知Allan方差中出現的特征斜率為-1、-1/2、0、1/2和1次冪斜率,Allan方差與噪聲密度相關,噪聲密度為頻率。Allan方差是用時間表示的指標。該值越小,穩定性越高,性能越好。
1慣性測量單元IMU (Inertial measurement unit)是一種用于檢測慣性運動的裝置。它由三軸角速率傳感器和三軸加速度傳感器組成。斜率為-1/2的Allan方差部分稱為角度隨機漫步。由于存在與白噪聲的相關性,因此增加平均時間會使平均時間的-1/2處的值降低。3全球導航衛星系統(GNSS)用于確定世界上任何地方的地理位置的衛星系統4慣性導航系統(INS) 5陀螺儀傳感器(角速率傳感器)測量單位時間內物體相對于參考軸的旋轉角度(角速率)。Allan方差中表示水平(零功率)特性的部分稱為偏置不穩定性。它與1/f噪聲相關,是傳感器電位的重要指標之一。
M-G370S陀螺儀艾倫方差(型號)
-
愛普生
+關注
關注
0文章
310瀏覽量
22124 -
IMU
+關注
關注
6文章
298瀏覽量
45678 -
測量單元
+關注
關注
0文章
27瀏覽量
8701
發布評論請先 登錄
相關推薦
愛普生(EPSON) 慣性測量單元(IMU)、陀螺儀傳感器等模塊應用領域選型介紹

EPSON新品IMU傳感器M-G570PR投產,功能更強大!

愛普生開發用于姿態和振動控制的理想IMU
意法半導體新款MEMS IMU LSM6DSV32X實現精確姿態識別應用
關于愛普生半導體

愛普生將大規模生產M-G570PR,這是一款采用多傳感器技術的高精度、低噪聲IMU

愛普生IMU系列新品——M-G366PDG和M-G330PDG

愛普生的慣性測量單元(IMU)M-G370PDT成為無人駕駛的理想選擇
日本宇宙航空研究開發“Int-Ball2”自由飛行相機機器人采用的Epson IMU
愛普生(EPSON)開發新IMU產品M-G370PDS改善姿態和震動控制
愛普生(EPSON)拓展其G系列IMU產品線,開發M-G366PDG和M-G330PDG

嚴苛工作環境下IMU的最佳選擇——愛普生M-G364及M-G354

愛普生開發新的三軸振動傳感器用于大壩和河流閘門設備監測
愛普生推出高規格M-G370PDG擴展其一英寸平臺imu產品線





 工商網監
工商網監
評論