 連載一:車載以太網時間敏感性網絡應用場景和實現難點
連載一:車載以太網時間敏感性網絡應用場景和實現難點
車載以太網發展趨勢,常用TSN協議種類和現狀
隨著汽車電動化、智能化、網聯化的快速發展,車內電子系統規模和復雜性日益增強,智能化系統如車道偏離警告、主動避撞等系統越來越普遍。這些系統在應用時對車載網絡的實時性、帶寬和可靠性提出了更高的要求。同時,針對未來智能汽車電子電氣架構,車載網絡也需要新型的通信技術支持。
與傳統車載網絡相比,車載以太網可以達到百兆千兆甚至更好的傳輸速度,能夠支持高數據帶寬和高通信速率,非常適合汽車中的ADAS、車載娛樂等系統,并逐漸成為汽車主干網絡。隨著以太網通信協議的發展,它可以在保留傳統以太網優勢的同時,克服傳輸不確定性的缺點,并且其點對點的工作方式使得網絡規劃更加靈活,可以通過不同的拓撲結構滿足各個子網實時性、冗余性和成本的需求。
為了在以太網上提供同步化低延遲的實時流媒體服務,IEEE 802.3工作組在2005年11月成立AVB工作組,制定了一系列音視頻傳輸技術的協議,使得基于以太網的實時音視頻傳輸技術得以走向市場。AVB組制定的以太網音視頻橋接技術(Ethernet Audio/Video Bridging,以下簡稱AVB)是一項新的IEEE 802標準,其在傳統以太網的基礎上,通過保障帶寬、限制延遲和精準時鐘同步,為網絡提供完美的服務質量,以支持各種基于音頻、視頻的網絡多媒體應用。AVB關注于增強傳統以太網的實時音視頻性能,同時又保持了100%向后兼容傳統以太網,是極具發展潛力的下一代網絡音視頻實時傳輸技術。
為了更準確地反映AVB的持續發展,IEEE AVB任務組名稱在2012年11月正式更改為“時間敏感網絡(Time Sensitive Network,簡稱TSN)小組”。TSN任務組基于最初的AVB標準架構,并致力于開發更強的功能以實現超低時延的控制網絡。雖然AVB和TSN這兩個詞通常可以互換使用,但是TSN協議簇里提出了許多新的概念和功能,以支持更多的應用領域。時間敏感網絡(TSN)不是單一的標準,而是由一個系列標準組成。
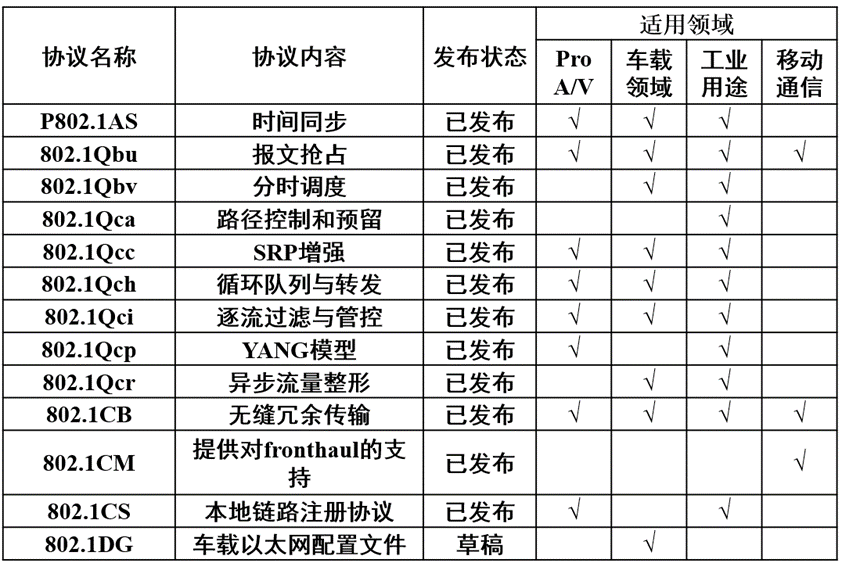
下表是一系列TSN協議標準,然而并不是所有的協議都適用于車載場景。其中IEEE 802.1 AS、IEEE 802.1 Qbv、IEEE 802.1 CB、IEEE 802.1 Qci、IEEE 802.1 Qbu、IEEE 802.1 Qch、IEEE 802.1 Qcc和IEEE 802.1 Qcr被認為適用于車載場景。前四項標準是其中最常用,也最可能成為第一批應用于車載的TSN協議。這些協議可以保證車載網絡的時間同步,確定性傳輸和可靠性。然而在汽車這一典型的物理信息系統中,系統通信網絡的復雜性、啟動時間要求、功能安全和信息安全等多方面因素都迫使這些標準協議及其參數設計需要被進一步研究和優化。
常用TSN協議的應用場景
在汽車領域,TSN可以應用于以下場景:
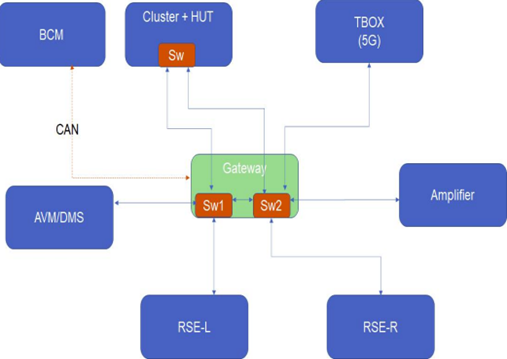
車載信息娛樂系統:TSN可用于傳輸車載娛樂系統中的音頻、視頻等多媒體數據,確保數據的實時傳遞和同步,在車內提供更好的娛樂體驗。具體場景如圖所示,高清地圖和定位信息通過 T-BOX 經過中央網關傳遞給車機 HUT 和儀表;HUT 車機上的多媒體視頻流通過網關傳輸到兩個后座的娛樂屏,要求在兩個屏上同步播放同一個視頻內容。由于數據要求帶寬大,要求快速冗余切換和精準時鐘同步,所以需要用到802.1AS-Rev,802.1CB,802.1Qci,802.1Qbv等協議。
高級駕駛輔助系統(ADAS):TSN可用于實現ADAS系統中不同模塊之間的實時數據交換,例如傳感器數據的傳輸、決策和控制命令的傳遞。確保這些數據的時間同步和確定性傳輸,保證傳感器融合或決策規劃算法正常工作。雷達、激光雷達、超聲波、攝像頭等環境感知傳感器數據融合,對數據傳輸帶寬要求很大,傳感器數據融合尤其是采用后端數據融合的解決方案,要求來自不同傳感器的數據可以 實時同步傳輸到中央計算平臺。對于安全相關的多媒體數據流;傳輸周期小于 10ms;傳輸時延小于 1ms;不允許有數據丟失的情況。所以會用到802.1AS-Rev,802.1Qbv,802.1Qbu。
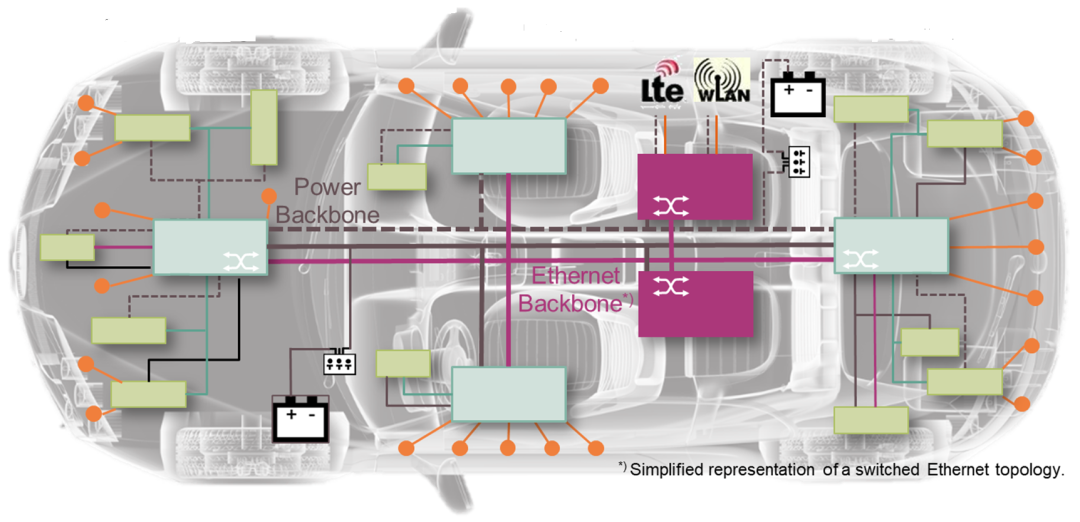
智能網聯汽車跨域通信:在新型汽車電子電氣架構背景下,車載以太網作為骨干網絡連接各區域控制器如圖所示。算力共享是一個典型的場景,例如區域控制器使用中央計算平臺的算力實現車輛控制的計算。在此場景中涉及到不同帶寬和不同實時性要求的流量傳輸。TSN能滿足不同類型流量的通信需求,為了實現骨干網絡中通信能力的最優分配,達到低延時,高可靠和確定性的傳輸,可能用到的TSN協議有802.1AS-Rev,802.1CB,802.1Qci,802.1Qbv,802.1Qbu等。
隨著自動駕駛和智能交通技術的發展,TSN在汽車領域的應用還將繼續擴展。
常用TSN協議的實現難點
TSN協議車載應用的實現難點如下:
1. 缺乏成熟的協議功能性能仿真平臺,現有的如OMNet++,RTaW和TSN System在功能和車載場景適配上都有局限,無法真實模擬車載場景進行仿真。
2. 車載以太網交換機和端節點芯片對協議的支持和開放程度有限。
3. 缺乏針對車載的TSN協議相關測試標準,且行業沒有系統級的TSN網絡測試方案。
4. TSN協議復雜度高,在復雜的網絡場景下參數設計困難,和不同交換機的配置方法各不相同,需要自動化的設計和配置方法來降低技術實現的難度和所需成本。
在協議層面的實現難點如下:
1. 針對IEEE 802.1Qbv的時間窗口設計與對齊:需要同時考慮各個流量的優先級、帶寬需求、時序要求和鏈路傳輸延時等因素綜合設計。
2. 針對IEEE 802.1CB冗余路徑選擇和冗余幀的處理:報文的復制會占用多個路徑的帶寬資源,需要進行可靠性和帶寬利用率之間的權衡。設計冗余路徑時需要考慮冗余路徑之間的跳數差不能過大,否則可能會導致網絡中發生故障或者鏈路斷裂時出現報文突發或亂序的情況。
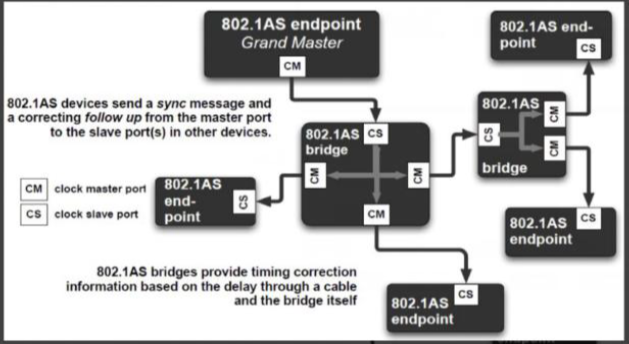
3. 針對 IEEE 802.1AS同步啟動時間和冗余同步方案:系統在啟動到同步完成的時間和同步失效后如何以最快速度切換到備用時鐘或備用冗余鏈路,同時保證同步精度的穩定是在車載應用時的難點。
4. 針對IEEE 802.1Qci監控和過濾參數的配置:在復雜的車載網絡中,正確設計監控和過濾參數使通信網絡對可預見和不可預見的異常具備足夠的彈性是比較困難的。
基于英飛凌AURIX?的解決方案
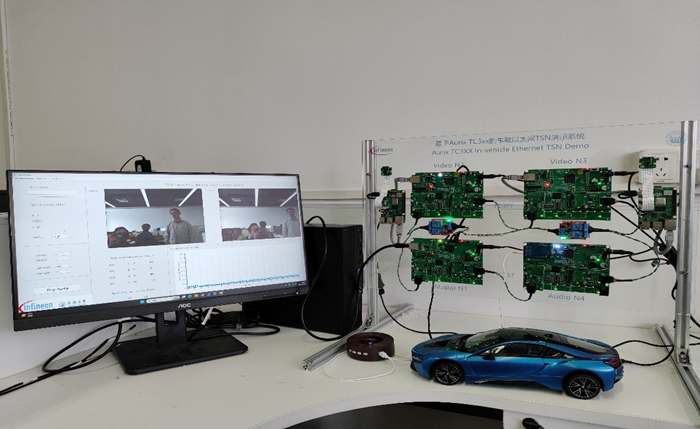
針對上述實現難點,同濟大學開發了基于英飛凌AURIX? TC3xx的時間敏感性網絡演示系統。
系統的整體結構如圖所示,由一個主控節點N1,兩個視頻轉發節點N2和N3,一個音頻節點N4以及兩個帶攝像頭的樹莓派節點組成。其中N2節點同時還是車模的控制節點。N1-N4每個節點都包含以太網交換機和主控MCU TC3x7。四節點組成的主干網絡通過1000BASE-T1連接形成環形網絡。
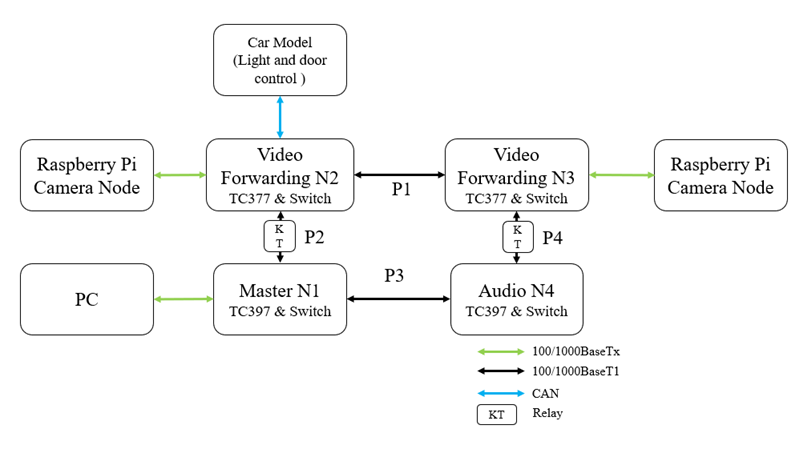
視頻流由兩個樹莓派節點生成并傳輸至N2和N3,并最終根據設計的路徑到達PC,并在上位機上顯示。音頻文件存儲在上位機中,由上位機發往N4音頻節點,通過音頻模塊和音響實現播放。控制報文以以太網的格式從上位機發出,到達N2節點后轉換成CAN報文,并發送給車模節點,實現車門和車燈的控制。
IEEE 802.1AS是網絡的基礎,用于所有節點的時間同步。其中N2的TC377為全局的主時鐘節點,其他節點交換機和控制器均以該節點時間為參考進行時間同步。同時通過上位機可以動態的對上述既定的音視頻流量和控制流量進行TSN協議的配置,例如IEEE 802.1Qbv、IEEE 802.1CB、IEEE 802.1Qci和基于TC3系列實現的端節點分時調度機制。除此之外上位機還能控制網絡中干擾流量的生成,通過視頻卡頓的直觀感受和視頻流實時端到端延時散點圖,端和橋中應用TSN協議后的實際效果和性能可以被清晰直觀的反應。
整個系統實物如圖所示:
下一篇我們將結合IEEE 802.1AS,IEEE 802.1Qbv,IEEE 802.1CB協議標準,深入解析基于英飛凌AURIX? TC3xx的時間敏感性網絡演示系統如何解決上述難點。
敬請期待……
審核編輯 黃宇
-
車載以太網
+關注
關注
18文章
209瀏覽量
22774 -
車載網
+關注
關注
0文章
12瀏覽量
4238
發布評論請先 登錄
相關推薦
車載以太網與傳統以太網的區別
溫度敏感性藥品不同儲運容器的溫度監測方法

CAN轉以太網模塊的應用場景



HDN-VDO 新款支持百兆/千兆車載以太網AVB/TSN時間敏感交換機SW2000M/N TSN交換機










 工商網監
工商網監
評論