 用于機器人化血管栓塞的磁性柔性微纖維機器人研究
用于機器人化血管栓塞的磁性柔性微纖維機器人研究
面對傳統栓塞治療方法在操作手法限制、精確度不足,以及醫生長時間暴露于輻射下的健康風險等方面的挑戰,磁性微纖維機器人技術的開發提供了一種新的可能性,旨在改善現有的治療方法。
華中科技大學臧劍鋒教授、陶光明教授、上海交通大學的楊廣中院士以及中國科學技術大學王柳教授合作,在血管機器人栓塞領域實現了新進展。該團隊在Science Robotics上發表了關于磁性微纖維機器人(microfiberbots)技術的研究,題為“Magnetic soft microfiberbots for robotic embolization”(用于機器人化血管栓塞的磁性柔性微纖維機器人),這項技術為治療腦動脈瘤和腦腫瘤的微創介入方法提供了新的方向。
本文提出使用具有高度操控性、可靠的機動性和多模態形狀重重構能力的磁性軟微纖維機器人,通過遠程、無纜、磁控的方式,在亞毫米區域內執行機器人栓塞。該磁性軟微纖維機器人通過將硬磁軟復合材料熱拉制成百米長的微纖維,所得磁性軟纖維的直徑可以在20-90μm的超細范圍內精確調節。盡管尺寸很小,但這種超細、柔軟的磁性纖維保留了其熱塑性特性。
隨后經過磁化和塑模編程,賦予其螺旋磁性極性。通過控制磁場,磁性軟微纖維機器人展示了在流動條件下可逆的延長/聚集形態變換和螺旋推進,允許其通過復雜的血管系統進行可控導航,并在亞毫米區域內執行機器人栓塞。本文在神經血管模型中進行了體外動脈瘤和腫瘤的栓塞,以及在活體兔股動脈模型中進行了實時熒光透視下的機器人導航操控及栓塞。這些實驗展示了該工作的潛在臨床價值,為未來的機器人輔助栓塞手術方案鋪平了道路。
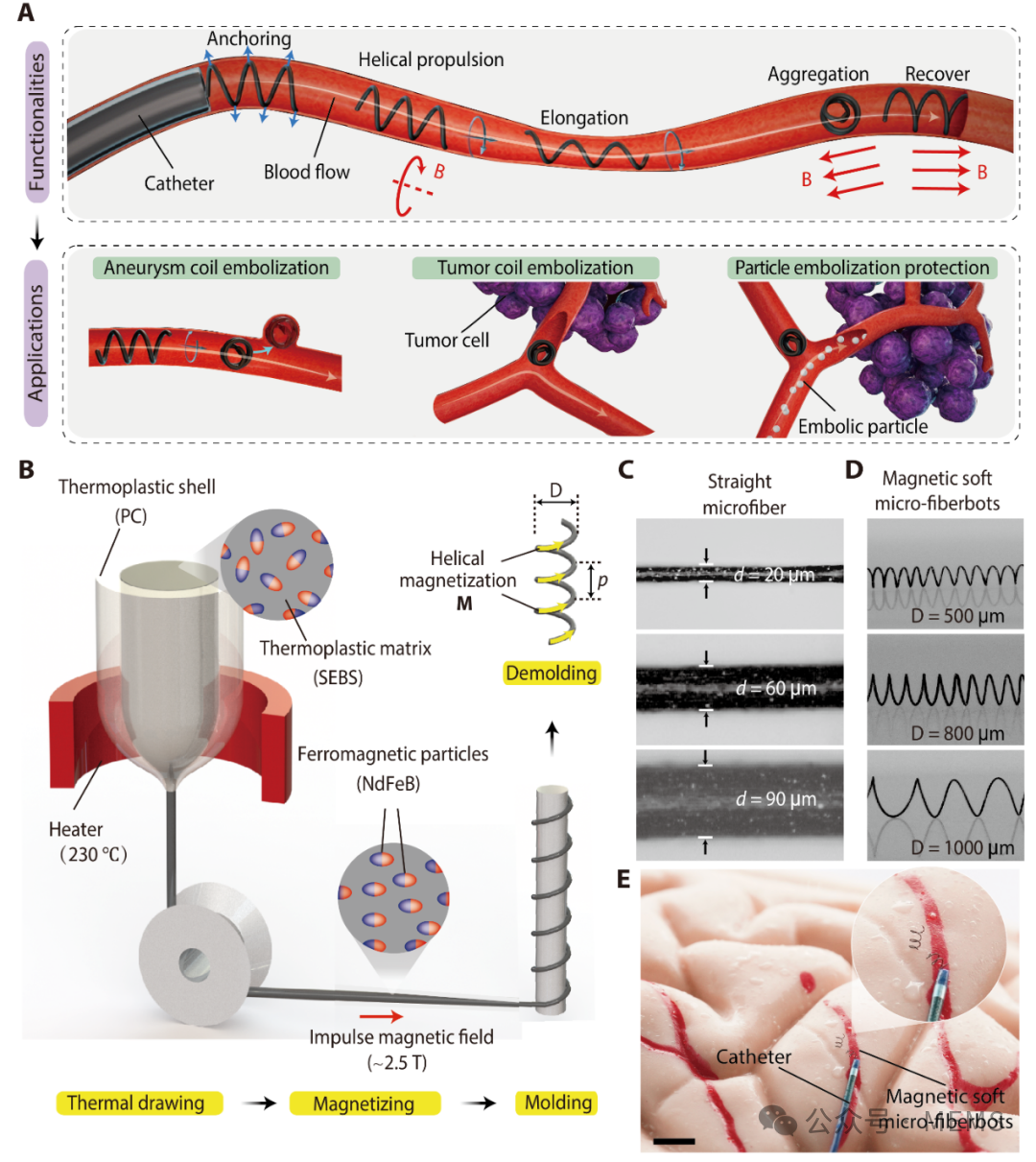
圖1 用于機器人栓塞的磁性軟微纖維機器人。A 微纖維機器人多模態形狀重構及機器人栓塞示意圖。B 磁性微纖維熱拉制、磁化及塑膜編程示意圖。C 多種直徑的磁性微纖維的照片。D 微纖維機器人的照片。E 微纖維機器人在腦部假體上的實物圖。
微纖維機器人展示出類似血管支架的錨定功能,能夠通過接觸摩擦力穩定地錨定于血管內壁,避免被血流沖走。其螺旋磁化分布(M)為微纖維機器人提供了沿其中心軸線的凈磁化方向(Mnet)。通過施加一個與Mnet方向一致的外部磁場B,可以使微纖維機器人伸長;反之,當外部磁場B與Mnet方向相反時,微纖維機器人則會聚集。這種微纖維機器人的柔軟性和高魯棒性確保了其在超過千次的聚集與伸長循環操作后,其形態重構功能仍保持完全可逆。
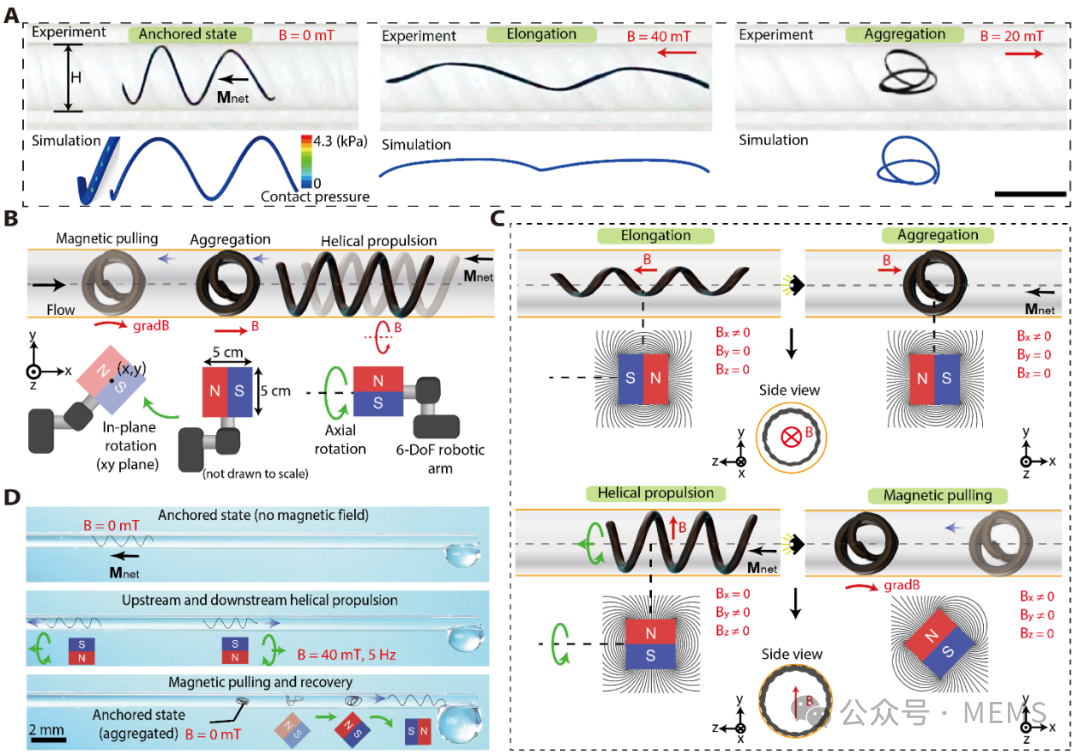
圖2 模擬血液流動環境下的形態變換能力和磁性操控性。A 微纖維機器人在錨定、伸長及集聚狀態下的實驗照片及仿真對應。B 磁場拉伸、原位集聚及螺旋進動磁場操控示意圖。C 微纖維機器人在外加磁場下伸長、集聚、螺旋進動及磁性拉伸的多模態磁控示意圖。D 微纖維機器人在無外加磁場下原位錨定、外加磁場下逆流、順流螺旋進動及磁性拉伸、集聚和恢復的照片。
不同于之前報道的磁性軟體機器人,微纖維機器人的螺旋磁化方向特性使其變形和運動方式能夠獨立于控制磁場正交解耦,提供了獨特的磁場控制靈活性。這一特性不僅允許單個微纖維機器人在旋轉磁場作用下逆血流移動,還能實現多個微纖維機器人的形態和運動的獨立控制。此外,這些微纖維機器人還能與常用的介入性導管兼容,以最大化其在臨床環境中的應用潛力。
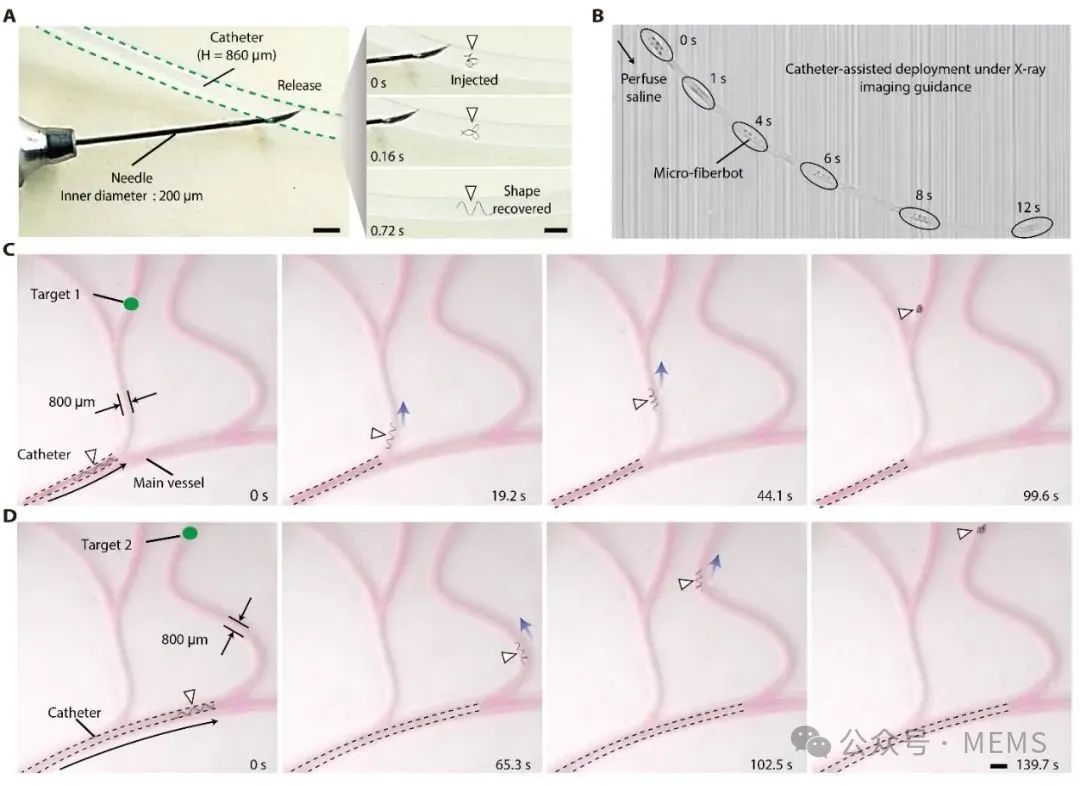
圖3 微纖維機器人的導管輔助部署。A 微纖維機器人經針管釋放的照片。B 微纖維機器人在X光成像引導下經導管部署的多幀圖。C 微纖維機器人經導管部署到目標1的導航多幀照片。D 微纖維機器人經導管部署到目標2的導航多幀照片。
本文在離體的多分叉的血管模型充分展示微纖維機器人在亞毫米區域的導航和變形控制能力。為了進一步驗證機器人的功能,作者在活體兔股動脈血管模型中展示了微纖維機器人在血管中的運動導航和多模態形狀重構。此外栓塞后三周進行的血管造影表明,微纖維機器人已成功促進穩定的血管栓塞,沒有再通的跡象。多重集聚的微纖維機器人的存在阻礙了從血管近端到遠端的血流,導致動脈內血栓形成。機器人栓塞手術的兔子血細胞數量在三周后仍保持在正常水平。
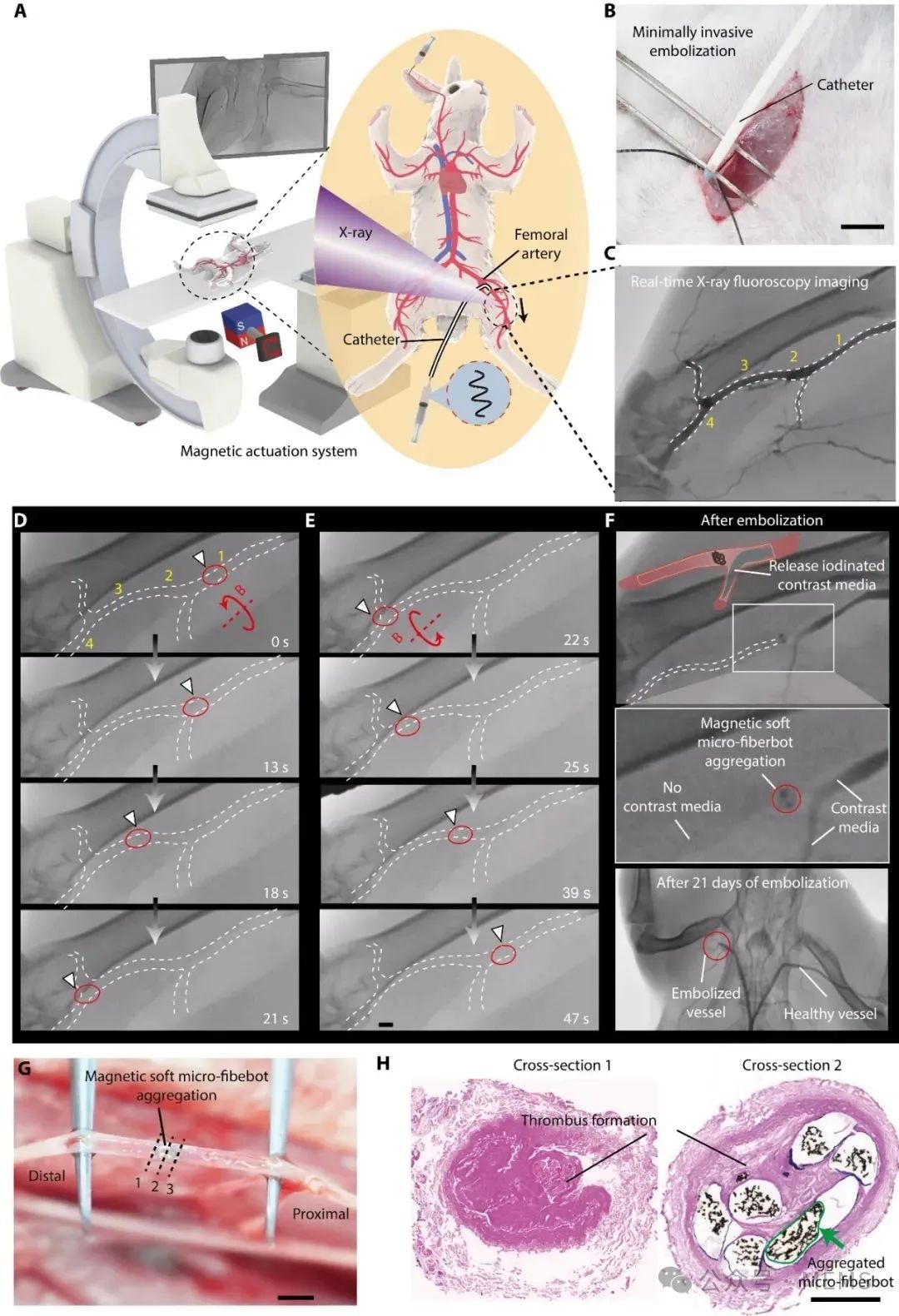
圖4 兔體內血管模型中的多重機器人栓塞應用展示。A 微纖維機器人在磁致動系統操控與X光成像引導下在兔體內股動脈血管模型中的機器人栓塞示意圖。B 微創機器人栓塞創口照片。C 對4個目標血管靶點的實時X光成像照片。D 微纖維機器人螺旋進動從靶點1到靶點4的導航過程的X光照片。E 微纖維機器人螺旋進動從靶點4到靶點1的回收過程的X光照片。F 微纖維機器人栓塞后效果及手術21天后的效果驗證。G 微纖維機器人多重集聚栓塞照片。H 栓塞血管染色橫截面照片。
微纖維機器人的開發為血管栓塞治療提供了新的視角,并在微創手術治療技術中展現了應用潛力。這種技術通過精確控制血流阻斷,為傳統的導管栓塞技術提供了有效的補充或替代方案。盡管這項技術展示了潛力,但其應用于臨床的進程仍需克服包括微纖維機器人結構優化、材料的生物相容性以及血管定位和跟蹤系統開發等挑戰。研究團隊正致力于解決這些關鍵問題,以推進這一技術的應用。
華中科技大學集成電路學院碩士畢業生劉旭睿(現香港中文大學博士生)、中國科學技術大學近代力學系特聘教授王柳及華中科技大學武漢光電國家研究中心博士生向遠卓為論文的共同第一作者。華中科技大學臧劍鋒教授、陶光明教授和上海交通大學楊廣中院士為論文通訊作者。其他主要合作者還包括,華中科技大學附屬協和醫院肝膽外科主任萬赤丹教授,華中科技大學同濟醫學院附屬同濟醫院心臟內科周寧教授和華中科技大學機械學院尹周平教授等。該研究得到了國家自然科學基金、華中科技大學交叉研究支持計劃等項目的資助。
論文鏈接:
https://www.science.org/doi/10.1126/scirobotics.adh2479
-
機器人
+關注
關注
210文章
28231瀏覽量
206618 -
軟體機器人
+關注
關注
1文章
111瀏覽量
11691
原文標題:用于機器人化血管栓塞的磁性柔性微纖維機器人
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【書籍評測活動NO.51】具身智能機器人系統 | 了解AI的下一個浪潮!
醫療機器人有哪些_醫療機器人有哪些應用
開源項目!用ESP32做一個可愛的無用機器人

清華大學:軟體機器人柔性傳感技術最新研究進展

柔性機器人與剛性機器人區別與聯系

ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
復合機器人:重塑柔性生產的未來
其利天下技術·搭載無刷電機的掃地機器人的前景如何?
視覺機器人焊接的研究現狀

高壓放大器在介電彈性體折紙術軟體機器人中的應用
「喜報」邁步機器人榮獲機器人應用典型案例獎






 工商網監
工商網監
評論