 車載網絡協議與串擾問題
車載網絡協議與串擾問題
本文要點
汽車網絡協議包括本地互連網絡 (LIN)、控制器局域網絡 (CAN)、面向媒體的系統傳輸 (MOST) 和 FlexRay 等。
通過一根非屏蔽雙絞線 (UTP),車載以太網為汽車提供了一種經濟高效的輕量化通信解決方案。
車載通信網絡中使用了很多成束的電纜,易產生串擾。
自動駕駛汽車是汽車行業的未來。為了實現網絡安全連接,汽車行業使用以太網網絡。車載以太網是車載信息娛樂、故障診斷和遠程傳感器連接的必要組成部分。與控制器局域網絡 (controller area networks, CAN) 或 FlexRay 等常用的網絡協議相比,車載以太網具有更多優勢。對于車載以太網而言,網絡中的串擾也相對較少。本文將討論汽車網絡協議和影響車載網絡的串擾問題。

車載網絡的重要性日益凸顯
傳統燃油汽車正在被自動駕駛汽車所取代。事實上,自動駕駛汽車的市場需求非常強勁,以至于大多數主流車企都開始生產自動駕駛汽車。自動駕駛汽車的運行依賴電子系統,而不是機械或液壓系統。它使用的電子控制單元 (ECU) 在尺寸、重量和可靠性方面都優于傳統的電子控制單元。
自動駕駛汽車的電子控制單元是模塊化的獨立單元,可相互通信并與中央系統通信。與現有的駕駛安全解決方案相比,車載網絡需要能夠以更快的速度和更低的延遲傳輸數據,還要能夠以更大的帶寬處理大量數據。目前,車載網絡有幾種不同的協議。我們將在下一節討論其中的幾種。
車載網絡協議
汽車網絡協議包括本地互連網絡 (LIN)、控制器局域網絡 (CAN)、面向媒體的系統傳輸 (MOST) 和 FlexRay 等。
本地互連網絡 (LIN)
LIN 是一種串行網絡協議,用于汽車中各種組件之間的通信。這是一種低成本的網絡標準,可在汽車中提供低端多路復用通信。LIN 總線采用指令器/應答器方式進行通信,只需使用一根線纜即可實現。
控制器局域網(CAN)
CAN 是一種平衡差分雙線串行通信協議,可滿足車載網絡的高帶寬需求。CAN 支持自動駕駛汽車的電子控制單元無縫共享控制數據。這是一種基于優先順序驅動的通信協議。
面向媒體的系統傳輸 (Media-Oriented System Transport , MOST)
這是一種用于汽車的高速多媒體網絡,可在汽車部件內分發信息。MOST 總線使用光纖鏈路作為主要通信介質。
FlexRay
FlexRay 是一種串行通信協議,可為汽車安全攸關系統和自適應巡航控制提供可靠的通信。FlexRay 的部分優勢包括數據傳輸速度快、數據傳輸能力強和時間觸發通信。
車載以太網
前文提到的汽車網絡協議并不能滿足汽車的所有需求。當今的汽車需要實現車對萬物 (vehicle-to-everything,V2X) 的連接能力以及更大的帶寬。車載以太網協議可滿足汽車聯網需求,因而被汽車行業廣泛采用。車載以太網是一種快速的四線標準通信協議,可為車載系統提供保護。通過一根非屏蔽雙絞線 (UTP),車載以太網為汽車提供了一種經濟高效的輕量化通信解決方案。
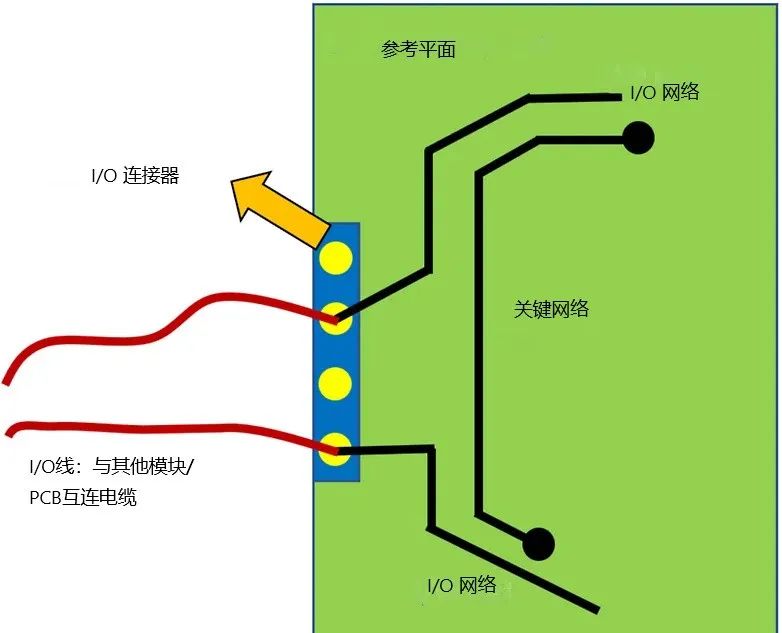
車載網絡中的串擾問題
汽車高速通信總線的設計使其能夠在惡劣的電磁環境中工作。車載網絡的輻射不應干擾車載或非車載設備。此外,車載網絡還不應受到外部噪聲的影響。如果車載數據網絡容易受到電磁問題的影響,就會降低汽車的安全性和可靠性。
綜合考慮所有這些方面,電磁兼容性成為車載網絡設計的重中之重。為了確保電磁兼容性,要在汽車電氣和電子結構設計中引入電磁干擾限制。
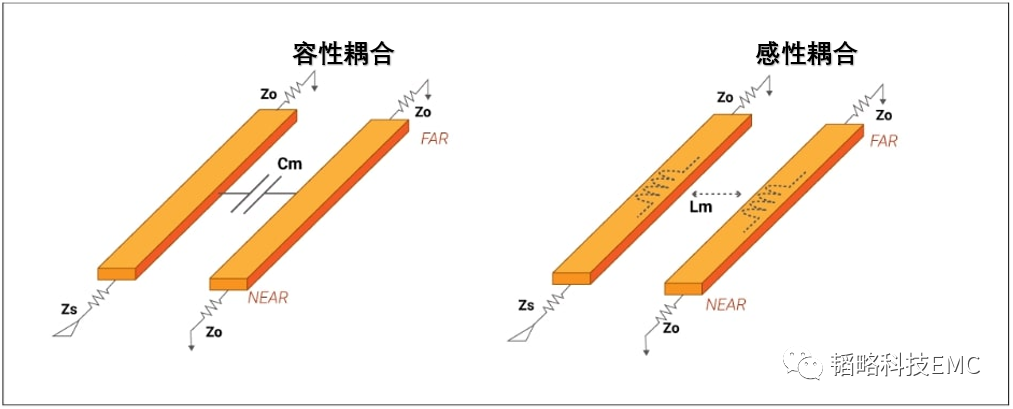
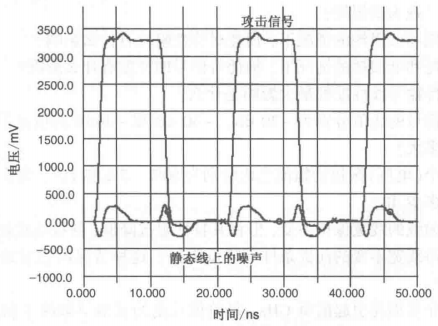
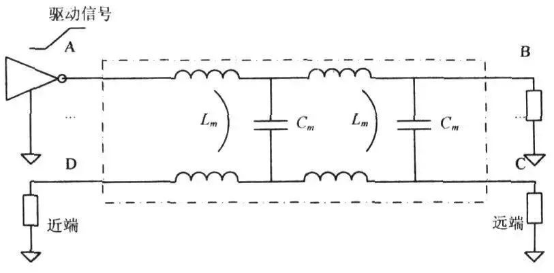
車載網絡中的串擾是常見的故障模式之一。串擾是一種不良現象,會影響到車輛的安全。串擾現象會導致汽車通信總線中的一條線路與另一條線路產生不必要的能量耦合,并降低汽車數據網絡的信號完整性。
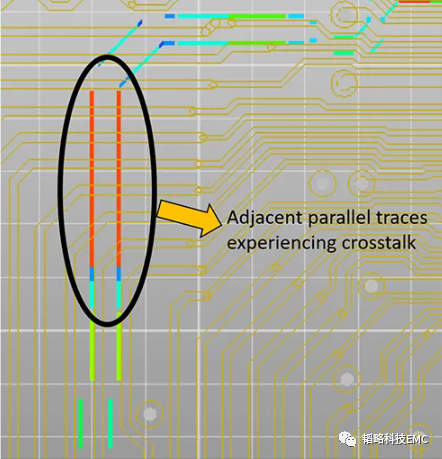
汽車通信網絡中使用的電纜線束會產生串擾,表現為以 dB 值表示的外部串音或功率和外部近端串音。數據通信線束中的多對電纜會削弱車載網絡的抗串擾能力。而作為最常見的以太網電纜類型,單根的雙絞線電纜有助于降低串擾的影響。
對于在自動駕駛汽車中建立通信的網絡,串擾會嚴重影響汽車電氣和電子結構的功能。與其他通信協議相比,車載以太網具有更好的性能、信號完整性和抗串擾能力同的電纜長度、屏蔽與非屏蔽的效果對比,老化以及針對車載以太網 100Base-T1 PHY 的合規性檢查。
-
以太網
+關注
關注
40文章
5271瀏覽量
169263 -
車載
+關注
關注
17文章
592瀏覽量
83283 -
網絡協議
+關注
關注
3文章
249瀏覽量
21465
發布評論請先 登錄
相關推薦
嵌入式開發中引起串擾的原因是什么?

如何使用SigXplorer進行串擾的仿真

怎么樣抑制PCB設計中的串擾
什么是串擾crosstalk?它是如何產生的?

PCB布線減少高頻信號串擾的措施都有哪些?
串擾的基礎知識






 工商網監
工商網監
評論