 伺服編碼器分辨率越高越快嗎
伺服編碼器分辨率越高越快嗎
伺服編碼器分辨率越高越快嗎
伺服編碼器分辨率指的是編碼器能夠提供的位置或運動信息的精度或精確度,具體表現為編碼器能夠將運動轉換為脈沖或位置信號的精細程度。通常以線數(Lines)或脈沖數(Pulses)來表示編碼器的分辨率。較高的分辨率意味著編碼器能夠提供更精確的位置或運動反饋信息。
然而,關于伺服編碼器分辨率與速度之間的關系,并沒有直接的等號關系。分辨率高主要代表編碼器的精度和位置信息的細致程度,而速度更多地與編碼器的響應速度有關。響應速度是指編碼器在接收到信號后的反應快慢,如果響應遲鈍,就像在理想的傳感器后串聯了一個低通濾波器,這會導致整個閉環控制系統中產生相位滯后,影響整個系統的高頻段穩定性。
目前大多數應用中,伺服電機的編碼器反饋速度非常快,可以看作是理想的傳感器。但某些通信速度較低的串行通信編碼器(如SSI)可能會因為通信方式導致一定的延遲,從而限制了速度環的帶寬。
分辨率(resolution)
分辨率是指編碼器每個計數單位之間產生的距離,它是編碼器可以測量到的最小的距離。
對于旋轉編碼器Q來說,分辨率一般定義為編碼器旋轉一圈所測量的單位或者脈沖(如,PPR)。
而對于直線編碼器來說,分辨率常常被定義為兩個量化單位之間產生的距離,通常給定的單位是微米(um)或者納米(nm)。
絕對值編碼器分辨率一般被定義為位的形式,因為絕對值編碼器輸出是基于編碼器實際位置的二進制°字“”。一位是一個二進制單位,如16位等于2^16,或者65536。因此,一個16位編碼器每圈提供65536個量化單位。
精度(accuracy)
精度用于衡量正常情況下實際值和設定值之間可重復的平均偏差的量值,對于旋轉編碼器來說,一般被定義為角秒或者角分,同時對于直線編碼器來說精度一般為微米。
一個很重要的需要注意的一點是,高的分辨率并不代表高的精度。
例如,兩個同樣精度的旋轉編碼器,一個分辨率是3600 PPR,而另外一個是10000 PPRo
低分辨率的編碼器(360O PPR)可以提供0.1°的測量距離,而高分辨率的編碼器可以提供一個更小的測量距離,但是二者的精度是相同的,高分辨率編碼器僅僅是具有將0.1°縮小到更小的增量距離的能力。
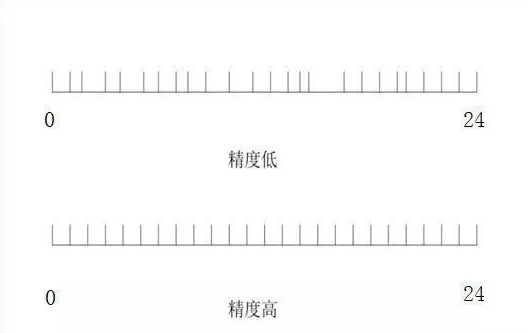
編碼器分辨率和精度是兩個獨立的概念,如上圖所示,兩個編碼器具有相同的分辨率(24PPR)但是具有不同的精度。當我們討論精度的時候,一般還會涉及到另外一個編碼器的性能指標—“可重復性”。
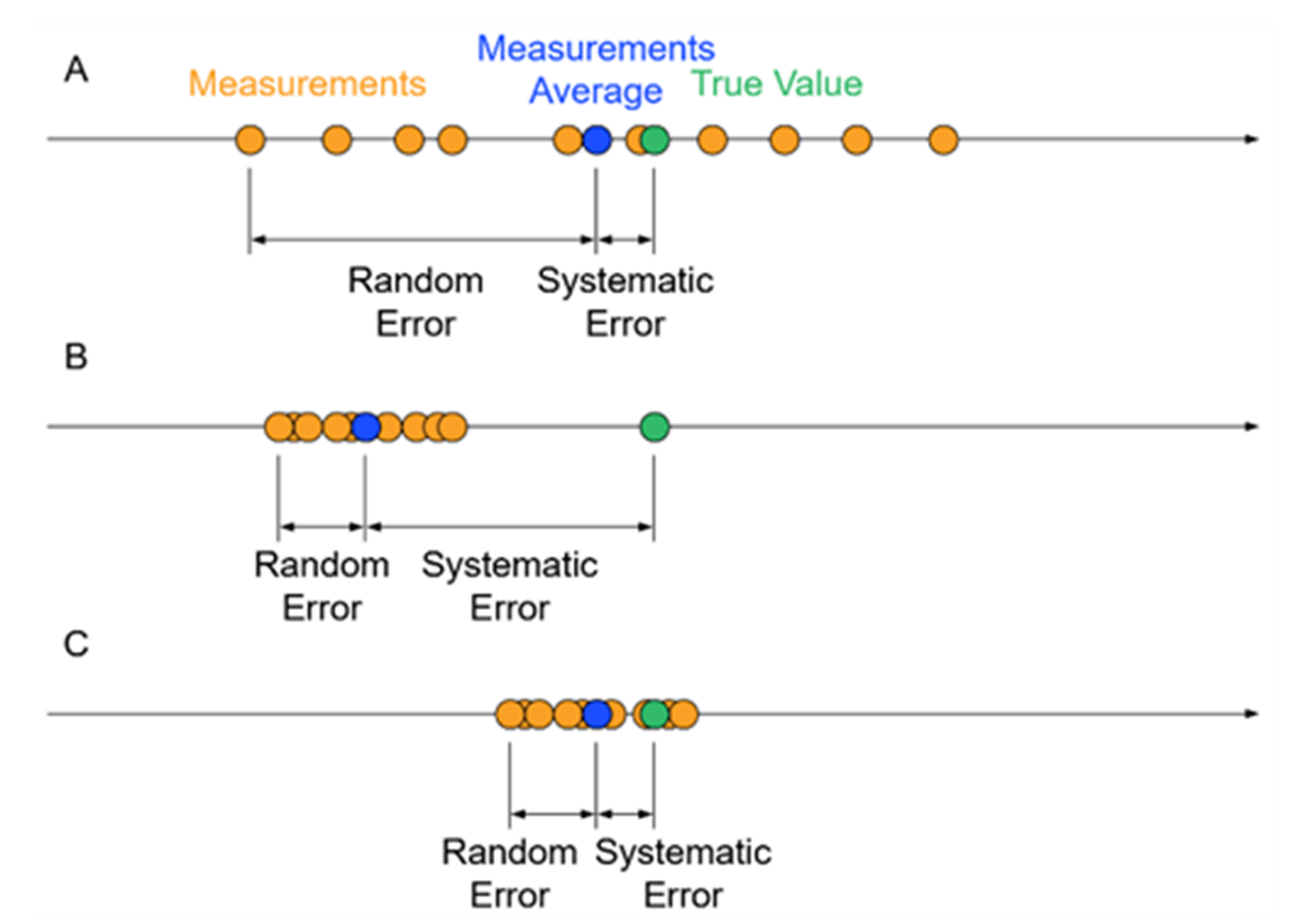
精度是指測量值與真實值之間的接近程度,不與標準進行比較,精度就無從談起。
“可重復性“是指在外部狀態不變的情況下,重現相同結果的能力。某些情況下,“可重復性”可能比精度更加重要。這是因為,如果系統具有可重復性,那么可以通過補償取消掉誤差。
一般來說編碼器的可重復性被定義為編碼器精度的倍率,常常是5到10倍的編碼器精度值。
伺服編碼器分辨率18位和24位區別
伺服編碼器的分辨率是指它能夠測量并輸出的位置信息的精度。18位和24位分辨率表示編碼器可以輸出的位置值的位數,這兩者之間有顯著的區別:
1. **18位分辨率**:
- 18位分辨率的編碼器能夠輸出最多 2^18(262,144)個不同的位置值。
- 這種分辨率通常用于一般的運動控制應用,如工業自動化、數控機床等,對精度要求不是特別高的場合。
- 對于較小的運動范圍或速度較慢的應用來說,18位分辨率通常足夠滿足需求,而且價格相對較低。
2. **24位分辨率**:
- 24位分辨率的編碼器能夠輸出最多 2^24(16,777,216)個不同的位置值,比18位分辨率更高。
- 這種高分辨率通常用于對位置精度要求較高的應用,如精密加工、醫療設備、半導體制造等需要更精確控制位置的領域。
- 24位分辨率編碼器可以提供更精細的位置控制,適用于高速運動、高精度定位或要求更高精度的應用場合。
- 由于其高精度和性能,24位編碼器通常價格較高。
總的來說,18位和24位分辨率的伺服編碼器適用于不同的應用場景,選擇取決于具體的需求和預算。18位分辨率通常適用于一般工業控制應用,而24位分辨率則更適用于對位置精度要求較高的應用。
審核編輯:黃飛
-
控制系統
+關注
關注
41文章
6550瀏覽量
110498 -
編碼器
+關注
關注
45文章
3601瀏覽量
134205 -
伺服電機
+關注
關注
85文章
2030瀏覽量
57723 -
伺服編碼器
+關注
關注
5文章
13瀏覽量
3082
發布評論請先 登錄
相關推薦
光學編碼器分辨率的定義方法
伺服電機編碼器精度與分辨率
編碼器怎么計算距離,編碼器分辨率是什么
編碼器的分辨率如何理解?
旋轉編碼器的分辨率如何選擇?
影響編碼器分辨率和精度的因素
選擇增量編碼器分辨率的方法,影響增量式編碼器分辨率的因素

伺服編碼器分辨率越高越快嗎?






 工商網監
工商網監
評論