 友思特案例 | 雙目散斑3D視覺引導自動化上下料解決方案
友思特案例 | 雙目散斑3D視覺引導自動化上下料解決方案
導讀
工廠產線中的人工物料分揀方式存在著許多不確定性問題,工業企業期待通過自動化上下料實現數字化轉型。高精度3D相機+零代碼編寫算法模塊+智能機械臂,友思特將單個視覺產品相結合,形成一站式自動化上下料解決方案,顯著地提高了生產線效率與智能化程度。
項目背景
在傳統的生產制造中,生產線上通常以人工的方式進行物料分揀、上下料等工作流程。然而,這種方式存在著諸多問題,如人工操作的疲勞程度大、生產效率低下、操作誤差率高,以及對于形狀、尺寸、重量不規則的零部件難以準確處理等挑戰。傳統的生產方式還難以適應市場需求的快速變化和個性化定制的要求。因此,數字化轉型和自動化生產成為了企業轉型升級的必然選擇。
結合雙目散斑3D視覺引導機械臂實現自動化上下料應用方案成為汽車零部件企業數字化轉型的關鍵技術路徑之一。
雙目散斑3D視覺技術能夠精確捕捉、測量和分析物體的三維形狀和表面特征,結合機械臂控制系統,能夠實現對零部件的高精度定位、抓取和放置,而不受物體形狀、大小和布局位置的限制。這項技術可以提高生產線的柔性和智能化程度,滿足汽車零部件生產中對于精度、效率和安全性的要求。
項目情況與需求
某大型汽車零部件廠考慮,在現有的生產線上使用3D視覺相機自動化上下料應用裝配,提高生產效率,減少人工錯誤,提高零部件生產質量,引入這項新技術可以提高其在市場上的競爭力。該公司與友思特達成深度合作,采用友思特自動化上下料軟硬件解決方案。
具有多種不同型號部件
部件為金屬工件,有部分反光
工作距離要求2m,料框尺寸1.2m*0.8m
深度方向定位精度要求1mm以內
節拍4s內完成單個工件抓取
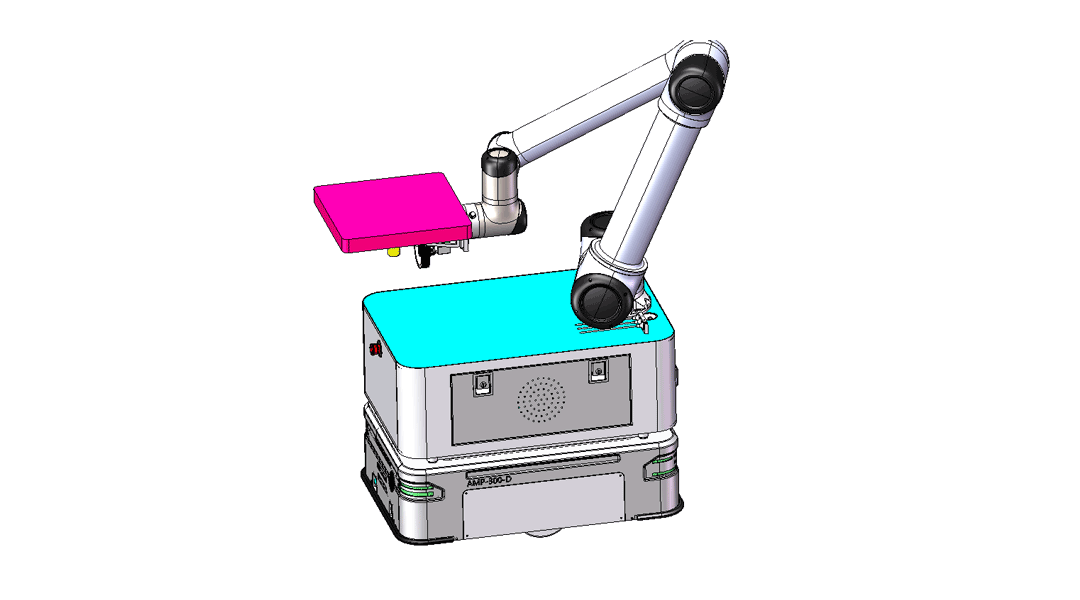
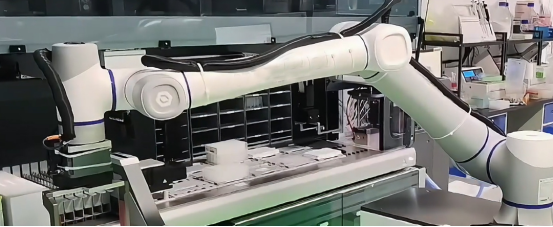
雙目散斑3D視覺引導自動化上下料解決方案
友思特推出雙目散斑3D視覺引導自動化上下料解決方案,滿足汽車零部件廠商的全部需求。
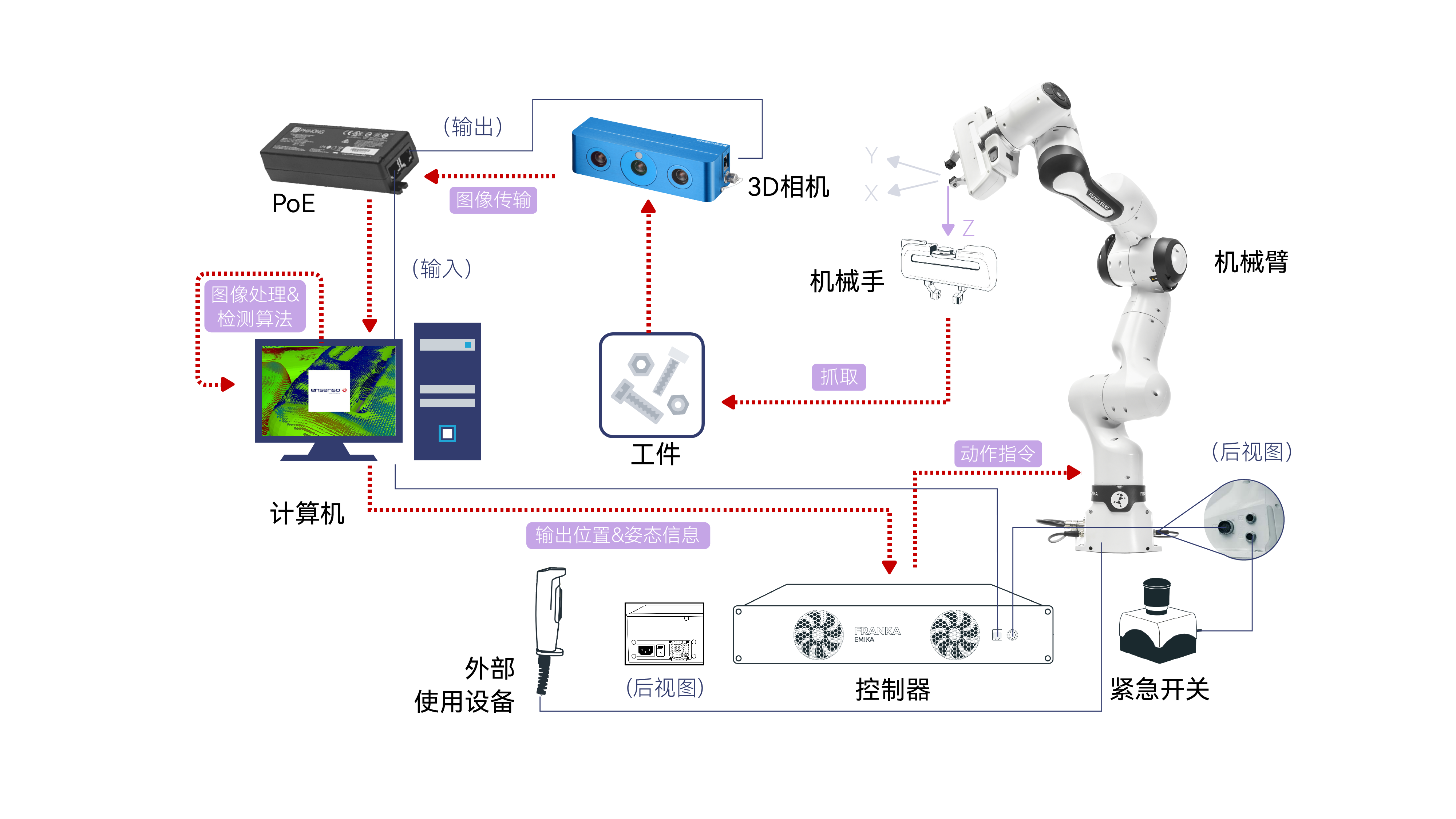
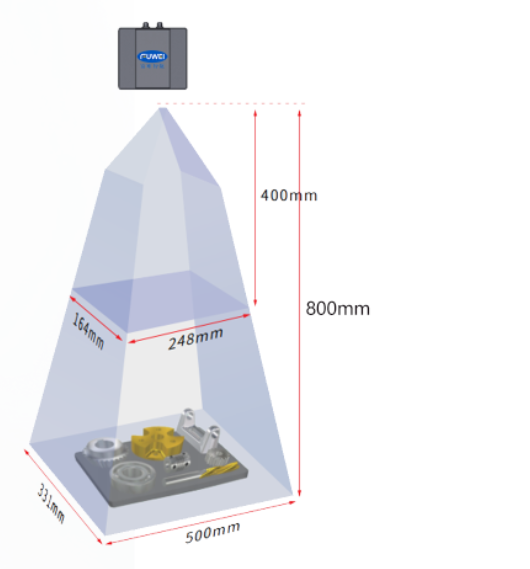
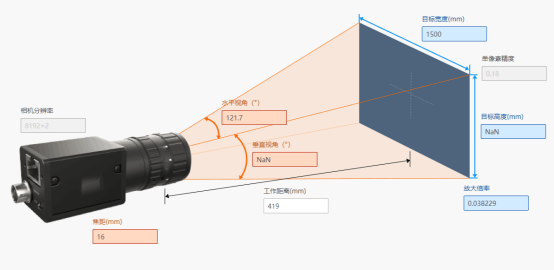
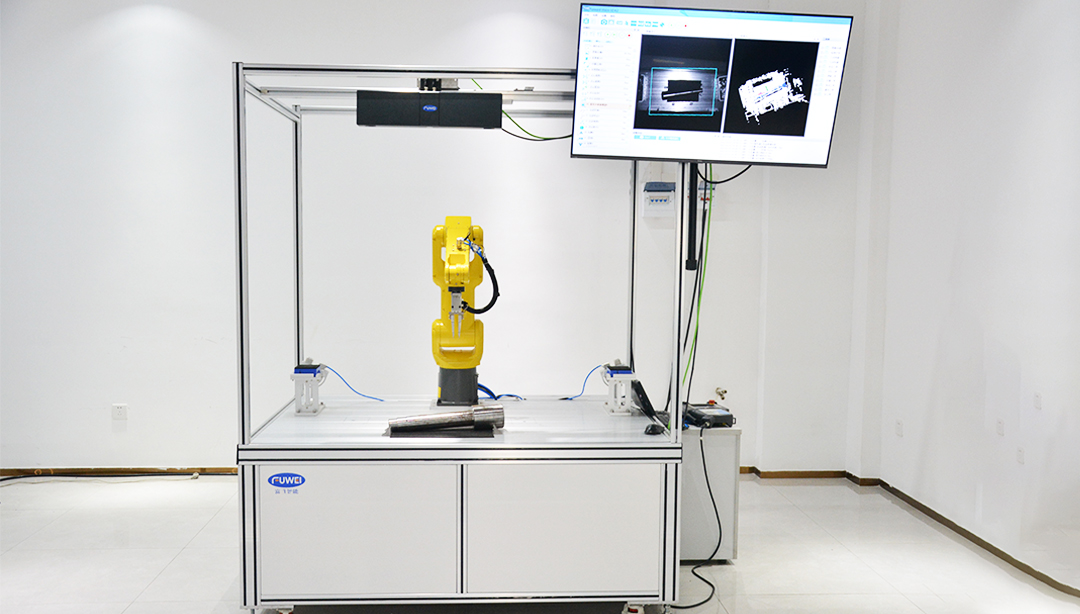
此方案采用①友思特高精度雙目散斑3D相機實時成像,在2m工作距離下,該相機檢測的視野范圍可達1390*927mm,z軸方向上的精度為0.35mm。結合與3D相機配套的②PartFinder工件目標檢測定位模塊,導入工件的3D模型(STL或PLY格式模型文件),經過軟件上簡單的參數配置,即可完成。3D相機會根據采集的點云圖像自動化識別檢測單個工件的中心坐標以及姿態角,通過TCP/IP協議將坐標位置數據發送至③機械臂,控制機械臂到指定位置抓取目標工件到預設定的裝放位置。
方案優勢
1. 采用雙目散斑大基線3D相機,基線長度455mm,3D相機傳感器工作距離遠,精度高,視野大。相機本身帶有200W大功率投影儀,可以將散斑紋理信息發射在工件表面,增加工件的紋理信息,獲取工件表面完整的點云輪廓信息數據;
2. 使用現成的PartFinder軟件模塊,與相機兼容運行,提供調用SDK例程,用戶無需耗費很長時間進行程序軟件上的開發。當產線上會有多種零件生產需求時,可以快速響應,生成對應的檢測模型,不需要做大量的圖像采集以及標注、訓練操作;
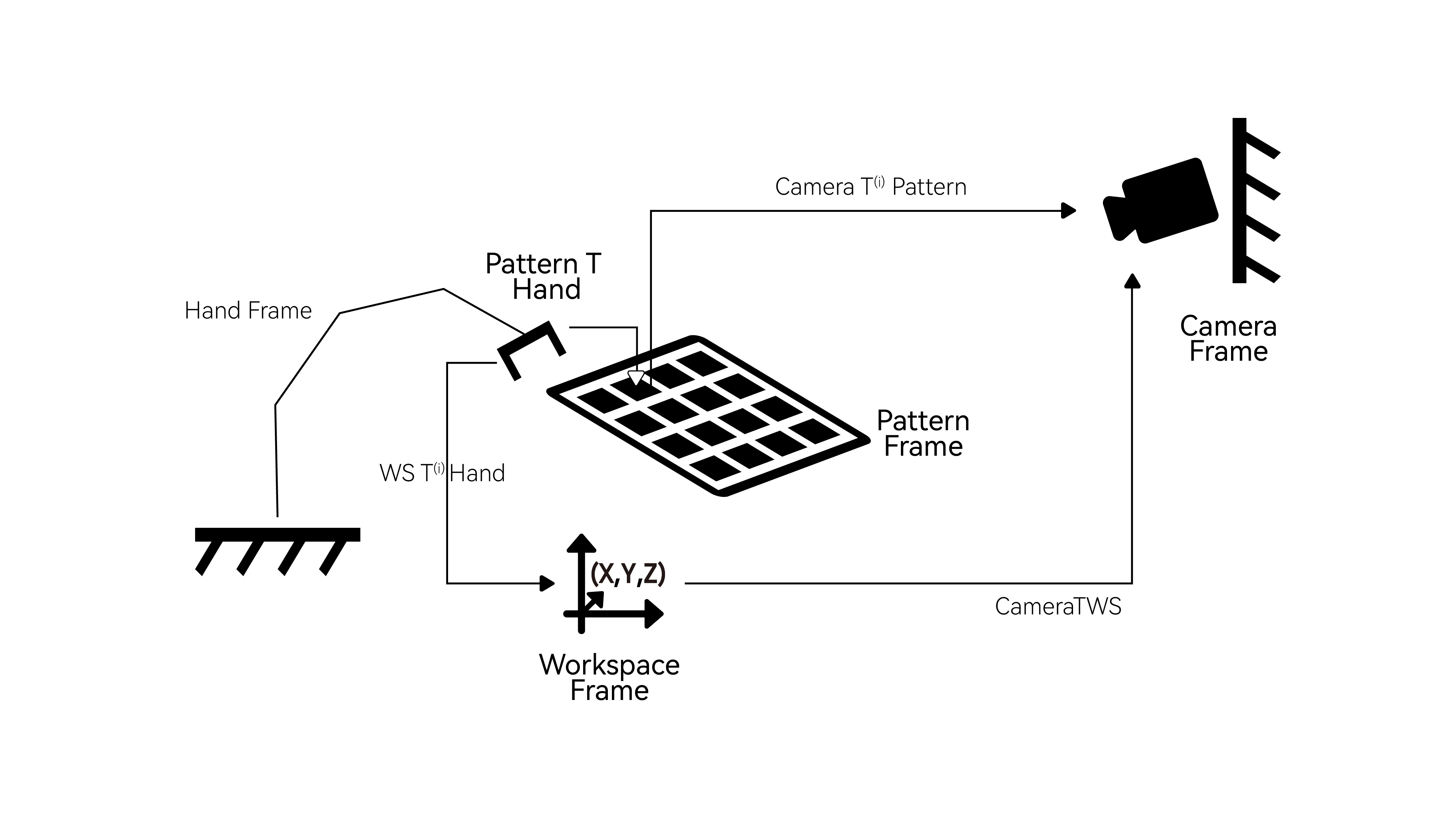
3. 關于3D相機與機械臂的手眼標定工作,提供手眼標定的SDK以及方法介紹,用戶不需要再進行手眼標定算法方面研究,將SDK運行通過多次調節機械臂夾持標定板在相機下的姿態,采集完多張圖像即可計算得到機械臂與相機之間的坐標關系。

友思特方案套裝軟硬件產品
C57-8-M 雙目散斑3D相機
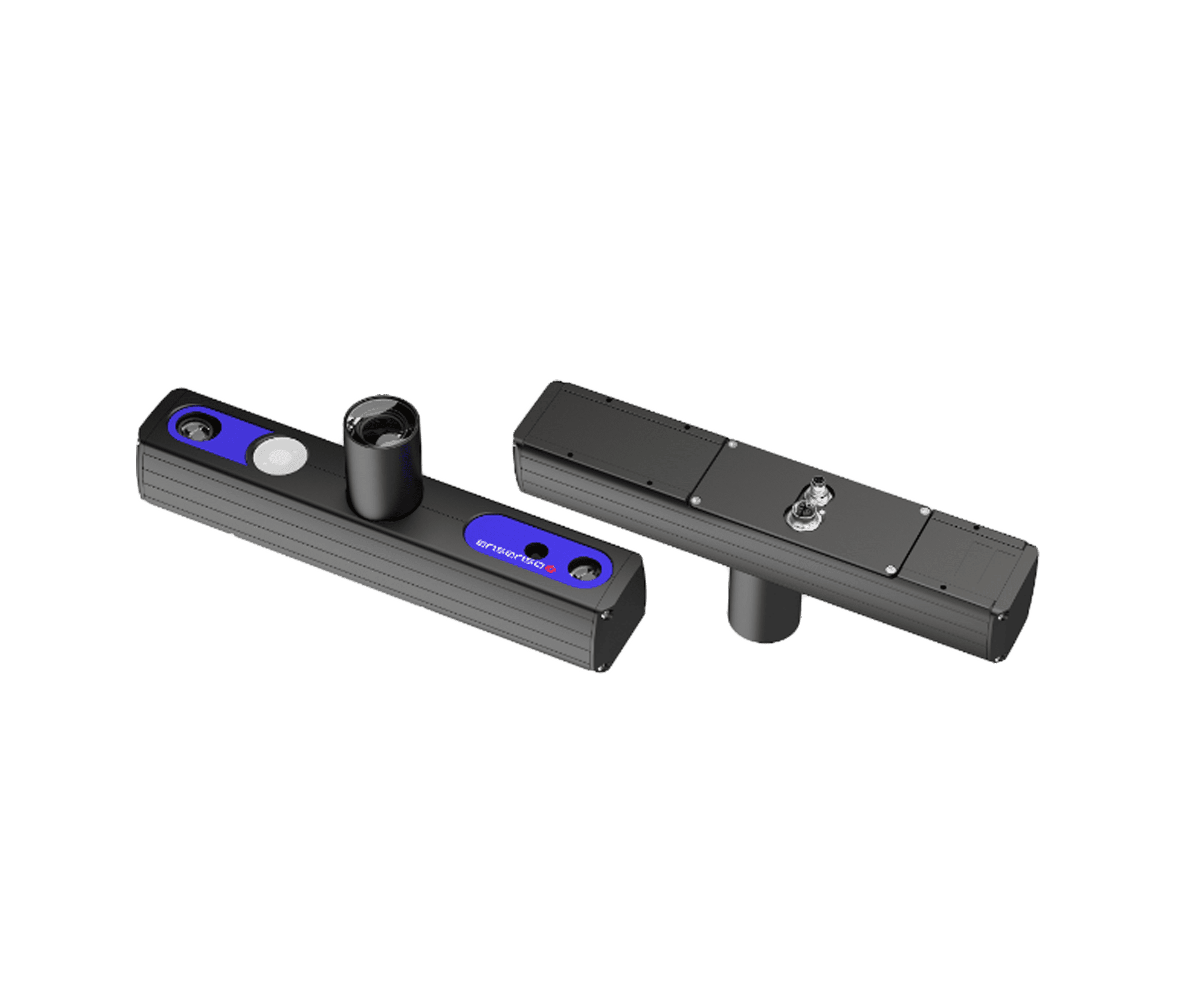
彩色3D視覺相機——配備集成RGB傳感器
緊湊且堅固耐用
在2m工作距離下檢測視野范圍可達1390*927mm,z軸精度達0.35mm
自帶200W投影儀,困難戶外條件也可使用
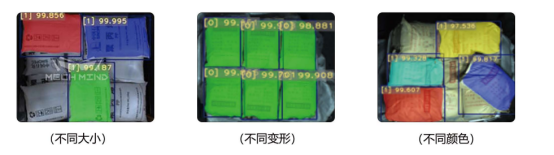
PartFinder工件目標檢測定位軟件模塊
零代碼實現基于CAD幾何圖形的部件識別
4步即可準確識別、分割、計算工件位置方向
快速生成模型和搜索匹配目標單體
可以綜合使用深度信息、表面法線和紋理數據,解決棘手的定位任務
Franka 機械臂

七軸柔性機械臂,精準力控
每個軸都裝有業界領先的扭矩傳感器
類人類觸覺,力位混合控制策略
審核編輯 黃宇
-
自動化
+關注
關注
28文章
5389瀏覽量
78644 -
機械臂
+關注
關注
12文章
502瀏覽量
24304 -
3D相機
+關注
關注
0文章
102瀏覽量
8000
發布評論請先 登錄
相關推薦
CNC機床加工上下料自動化解決方案
友思特案例 | 自研創新!三維工件尺寸測量及點云處理解決方案

解決方案|3D視覺引導多SKU紙箱混拆
解決方案|基于3D視覺技術的鋁合金板件刷油烘干自動化上下料
3C薄片自動化上料,3D視覺技術如何賦能?

富唯智能案例|3D視覺引導機器人抓取鞋墊上下料

采用3D視覺引導技術實現缸套的自動化下料,從而提升生產效率、降低成本并提高產品質量



針對Cnc數控機床自動上下料|整體解決方案
3D視覺的三大優勢
解決方案 | 3D視覺引導活塞桿正反抓取
解決方案 | 3D視覺引導發動機上蓋拆垛抓取






 工商網監
工商網監
評論