 榮耀手機首次搭載1200點激光雷達陣列對焦系統!
榮耀手機首次搭載1200點激光雷達陣列對焦系統!
2024年3月18日晚,榮耀舉行春季旗艦新品發布會,正式發布Magic6系列的旗艦-榮耀Magic6至臻版、榮耀Magic6 RSR 保時捷設計。榮耀手機在影像功能上不斷突破創新,首次搭載1200點激光雷達陣列對焦系統,也是業界首次落地的大面陣高分辨率3D dToF深度傳感器。
蘋果公司在2020年率先在iPad Pro上配備了3D LiDAR scanner,開創了dTOF傳感器在手機等消費類電子產品大規模商業應用的新時代。直至現在,激光對焦系統已經成為高端手機影像系統的標配器件。但受限于技術、成本等諸多因素,只能采用單點或小面陣dTOF傳感器,限制了手機在復雜場景下的影像能力。
Magic 6 系列搭載的新一代激光雷達陣列對焦系統在手機行業遙遙領先。激光對焦點數達到1200點,遠超其他手機,甚至超過單反相機的水平。對焦幀率達到60FPS,可媲美單反相機的對焦檢測速度。
這樣高性能的激光對焦系統,使得對焦速度、精度都大幅提升,實現單反級對焦體驗,讓手機行業首次實現單反級全向運動抓拍,幫助用戶輕松抓住生活中每一個精彩瞬間。
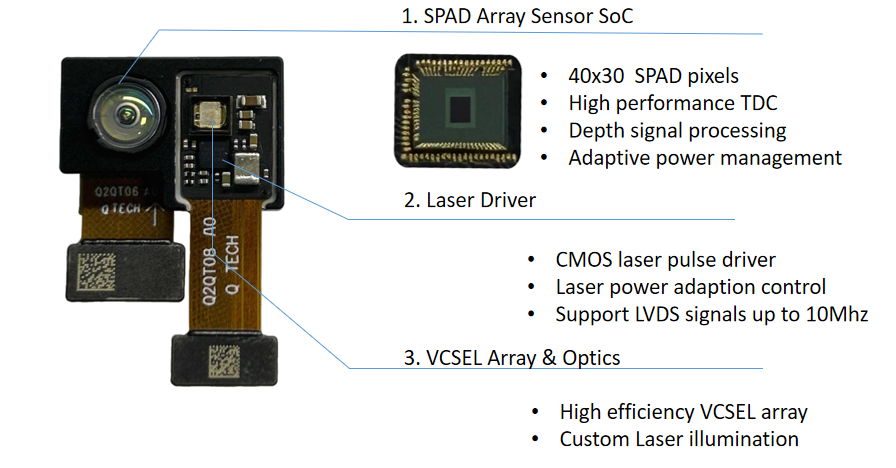
Magic6 系列搭載的激光雷達傳感器擁有行業領先的對焦性能,在手機移動設備上可實現高精、高效和穩定運行,都得益于芯視界研發的堆疊式dToF深度傳感器 - VA6320。
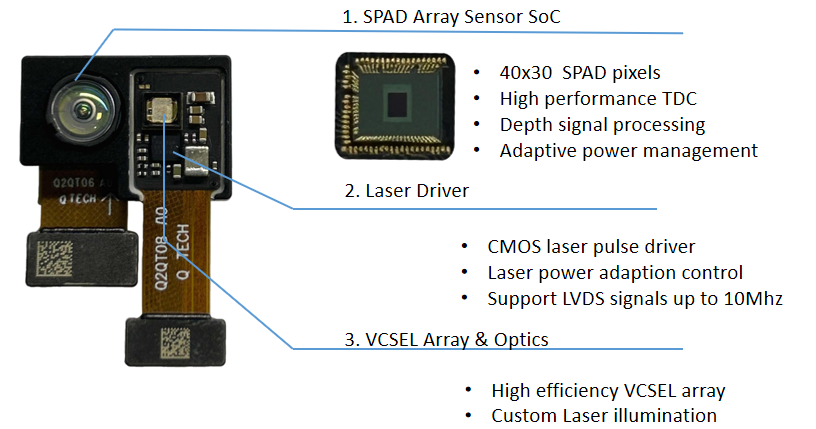
visionICs-VA6320
VS
Apple-LiDAR Scanner
與2020年蘋果公司發布的 LiDAR Scanner 的散斑技術不同,VA6320 采取了Flash激光照明方案,從成本、體積大小及功耗上評估,VA6320都更勝一籌,并且具備更多樣化系統的適配性。VA6320 提供的1200點精確深度信息,搭配多傳感器融合算法, 可產生足夠的稠密點云,為應用設備提供可靠的距離傳感。
VA6320 芯片基于超低功耗 SPAD 陣列,采用先進 3D 堆疊式結構,極大的縮小了芯片面積;
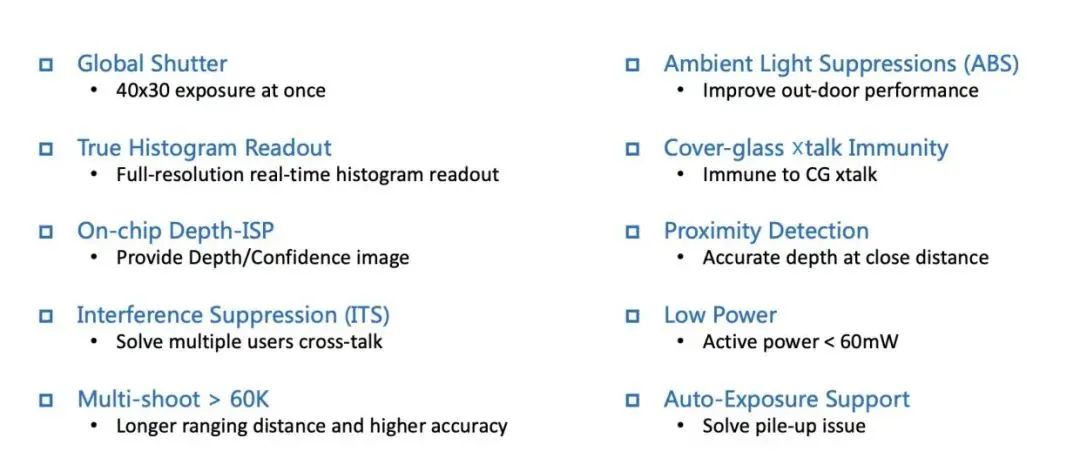
邏輯部分集成了動態電源管理模塊、高效能TDC、DSP 運算模塊、全局曝光 (global shutter)架構等創新設計;
可一次性性完成深度探測,實現高幀率, 短曝光, 低功耗的優異性能。
我們相信,VA6320的高像素、高幀率、低功耗和低成本等強大優勢不僅可以提升手機的影像功能和用戶體驗,還能為終端廠商提供差異化的競爭優勢,未來在VR/AR、機器視覺、IOT等更多領域都能夠發揮作用。
審核編輯:劉清
-
激光雷達
+關注
關注
967文章
3938瀏覽量
189593 -
榮耀手機
+關注
關注
4文章
237瀏覽量
15536 -
tof傳感器
+關注
關注
2文章
106瀏覽量
14769
原文標題:芯視界1200點激光雷達助力榮耀Magic系列對焦系統遙遙領先!
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
激光雷達的維護與故障排查技巧
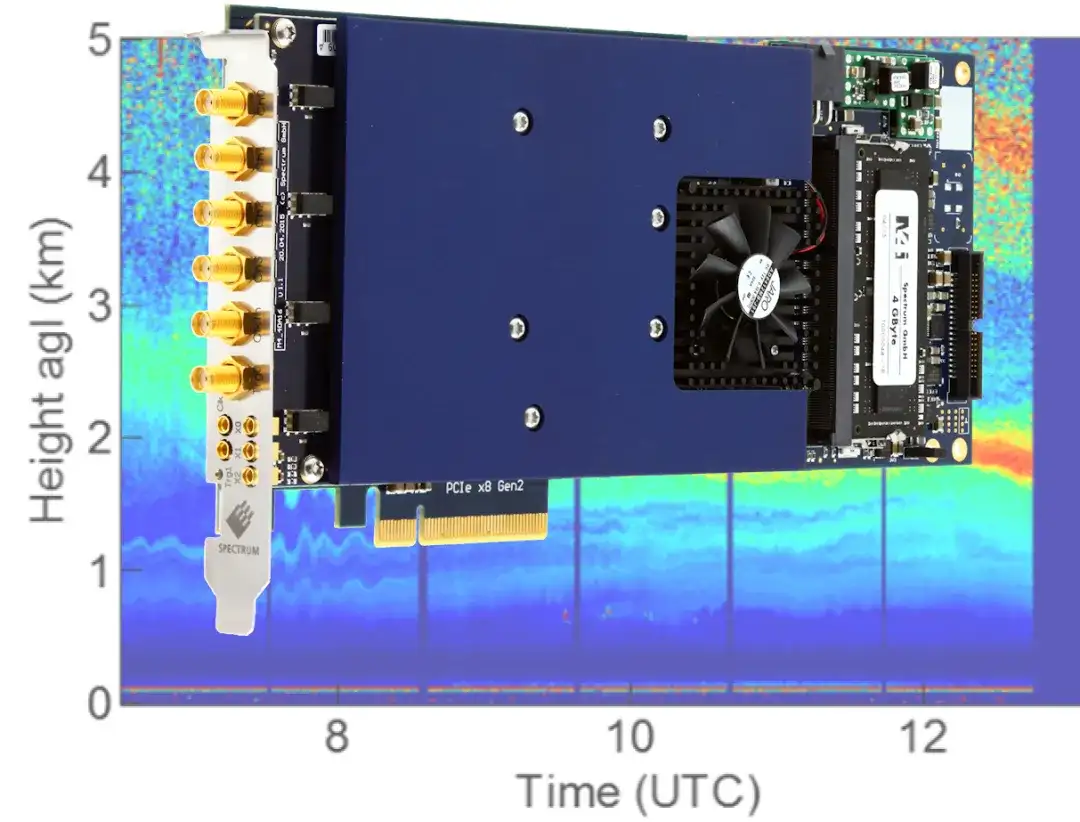
TS高速數字化儀在激光雷達系統中的應用
激光雷達點云數據包含哪些信息
一文看懂激光雷達


基于FPGA的激光雷達控制板

硅基片上激光雷達的測距原理

國產dToF加持,激光對焦重回旗艦手機
激光雷達的探測技術介紹 機載激光雷達發展歷程

華為詳細解讀激光雷達
什么是激光雷達?激光雷達的構成與分類

解析應用實時激光雷達全景分割的中心聚焦網絡
如何提取激光雷達的角點坐標







 工商網監
工商網監
評論