") 邊界工況推動下,汽車圖像傳感器的四大發(fā)展方向
邊界工況推動下,汽車圖像傳感器的四大發(fā)展方向
來源:傳感器技術(shù),謝謝
編輯:感知芯視界 Link
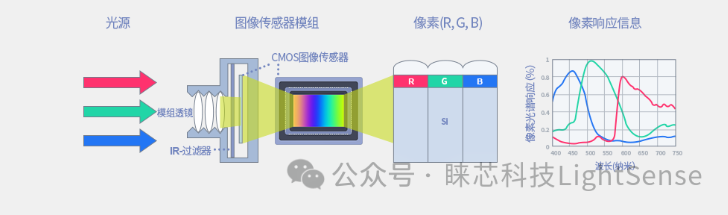
隨著自動駕駛等級進(jìn)階,搭載的攝像頭數(shù)量越來越多性能越來越高。為幫助自動駕駛車輛描繪出一幅幅精準(zhǔn)細(xì)膩的“路況圖”,其幕后英雄圖像傳感器正在嶄露頭角,高分辨率、高動態(tài)范圍等技術(shù)方向的推進(jìn)迫在眉睫。
搭上汽車快車道,車載攝像頭和圖像傳感器持續(xù)增長
行業(yè)內(nèi)流傳著一個從消費(fèi)者角度評判汽車智能化的標(biāo)準(zhǔn)——
“感受汽車智能化?坐進(jìn)駕駛室就知道。”
“評判駕駛室智能化?數(shù)數(shù)傳感器種類和數(shù)量。”
毫無疑問,傳感器已經(jīng)成為了自動駕駛的競爭高地。當(dāng)前的自動駕駛感知技術(shù)主要有兩大技術(shù)路線:一種是特斯拉為代表,僅使用攝像頭作為傳感器進(jìn)行信息采集的純視覺路線,一種是同時使用“攝像頭+雷達(dá)”的多傳感器融合路線。這兩種方案的共同之處在于都需要攝像頭作為基礎(chǔ)傳感器。
目前,新推出的中高端車型平均搭載超過10顆攝像頭,而攝像頭在汽車領(lǐng)域仍有巨大增長空間,一份調(diào)研報告的數(shù)據(jù)可以佐證這一觀點(diǎn)。Yole Group旗下的Yole Intelligence發(fā)布《Imaging for Automotive 2023》,其中預(yù)計車載攝像頭市場和圖像傳感器市場將分別以9.7%和8.7%的復(fù)合年增長率增長,截至2028年將達(dá)到94億美元和37億美元。
在車載領(lǐng)域,圖像傳感器被廣泛應(yīng)用于前視和后視攝像、360°環(huán)視系統(tǒng)、座艙監(jiān)控系統(tǒng)以及高級輔助駕駛系統(tǒng)等方面。隨著自動駕駛等級的不斷提升,汽車需要的攝像頭數(shù)量也越來越多,其苛刻應(yīng)用條件和功能安全無疑對圖像傳感器提出了更高要求。
從邊界工況出發(fā),看車載CMOS圖像傳感器面臨的挑戰(zhàn)
邊界工況決定了先進(jìn)安全自動駕駛的能力,作為智能駕駛之眼,CMOS圖像傳感器也需要一路升級打怪。
01高動態(tài)范圍
在隧道環(huán)境中,光線亮度差異大,容易導(dǎo)致圖像過曝或過暗,進(jìn)而影響圖像質(zhì)量和可視性。高動態(tài)范圍(HDR)的圖像傳感器能夠有效應(yīng)對這一挑戰(zhàn),同時捕捉明亮和暗部的細(xì)節(jié),提供更清晰、更準(zhǔn)確的圖像。
高動態(tài)范圍的技術(shù)路線包括連續(xù)多次曝光得到多幀圖像、大小像素技術(shù),相對于現(xiàn)在的應(yīng)用,這兩種方法在性能和設(shè)計有一些局限性。一些國際大廠通常采用超級曝光技術(shù)。
以在汽車圖像傳感器領(lǐng)域占有40%市場份額的安森美(onsemi)為例,通過將像素的感光和存儲功能分離,超級曝光技術(shù)可以在感光二極管飽和后將溢出的電荷存儲到電容器中,從而顯著增加像素的動態(tài)范圍。安森美的超級曝光技術(shù)可以通過一次曝光來實現(xiàn)較寬的動態(tài)范圍,例如,第一代超級曝光技術(shù)Hayabusa平臺的AR0233傳感器一次曝光可達(dá)到95dB的動態(tài)范圍,相比傳統(tǒng)的70+ dB的動態(tài)范圍,一次曝光就能達(dá)到兩次曝光的效果。而第二代超級曝光技術(shù)Hyperlux平臺的圖像傳感器,一次曝光能達(dá)到120 dB的動態(tài)范圍。
02LED抑制閃爍
另外一個常見的挑戰(zhàn)是LED燈閃爍,LED閃爍問題的根源是光照條件的變化,由于LED燈發(fā)出的光是脈沖光,傳感器在感光過程中的每一行的起始點(diǎn)是不同的,這導(dǎo)致一些行捕捉到了脈沖,而其他行在曝光時錯過了脈沖。結(jié)果就是圖像中的一些行是亮的,而其他行是暗的,這就是LED閃爍的典型效果。
改善LED閃爍的主要思路是延長曝光時間,從而捕捉到更多的脈沖。這樣,行與行之間的亮度差異就會減小,達(dá)到抑制LED閃爍的效果。因此,當(dāng)我們討論LED閃爍抑制時,實際上是在討論是否可以延長曝光時間。
然而,延長曝光時間會導(dǎo)致信號過曝溢出,超級曝光技術(shù)可以解決這個問題,因其可在同一幀的曝光條件下容忍更長的曝光時間,即使在光照較亮的情況下也能避免過曝。所以,超級曝光技術(shù)實際上可以抑制LED閃爍效應(yīng)。
此外,LED抑制閃爍,還可以通過軟件的方法解決。安森美的傳感器內(nèi)置了DLO模式,它可以檢測LED閃爍的區(qū)域,并通過軟件補(bǔ)償?shù)姆绞较魅鮈ED閃爍對亮度的影響。
03低照性能
由于人類視力的局限性,低光照度等駕駛條件會顯著增加道路危險性。在黑暗條件下,駕駛員往往無法及時察覺風(fēng)險。而且,對向車燈會讓駕駛員眩目,使問題變得更加嚴(yán)重。
低噪性能作為圖像傳感器評估的重要指標(biāo),通常使用線性信噪比(SNR)來衡量。如下圖公式所示,SNR是信號均值與總噪聲的比值。噪聲方面主要包括暗電流噪聲、隨機(jī)噪聲,像素間差異引起的固定模式噪聲(FPN),光子隨機(jī)噪聲,以及像素信號的讀出噪聲。在低光環(huán)境下,暗電流噪聲占主導(dǎo)地位,因此改善SNR主要通過改善暗電流噪聲來實現(xiàn)。
此外,從公式中可以看出,SNR與曝光時間、溫度密切相關(guān)。隨著溫度變化,SNR值是否能保持穩(wěn)定取決于暗電流噪聲水平在溫度變化過程中的表現(xiàn)。
Hyperlux系列通過安森美的超級曝光專利像素設(shè)計和最新的生產(chǎn)工藝,顯著降低了暗電流噪聲,從而提高了SNR和低噪性能,這種改進(jìn)使得Hyperlux在低光條件下表現(xiàn)出色。出色的設(shè)計和工藝使得Hyperlux能夠在不同溫度下保持相對穩(wěn)定的SNR值。
04高分辨率和小像素尺寸
手機(jī)上億像素時代,汽車頂配通常為800萬像素。這是因為可視距離隨著像素的增加而增加,但這種關(guān)系不是線性的,從成本角度考慮,過高像素會導(dǎo)致投入與回報不成正比。尤其在夜間條件下,反而會增加噪聲。因此,像素不是越高越好,200萬到800萬像素是一個比較好的平衡點(diǎn)。
圖像傳感器從VGA時代就用于汽車中了,一開始是后視倒車影像,后來是100萬像素圖像傳感器主要用于環(huán)視,到現(xiàn)在200萬、300萬或者800萬像素圖像傳感器開始逐漸應(yīng)用到前視、后視、環(huán)視等各個領(lǐng)域。
另外一個趨勢是,在分辨率逐漸升高的過程中,像素尺寸越來越小。像素尺寸需要與速度、靈敏度、圖像質(zhì)量達(dá)到完美平衡,更大的像素具有更大的面積來收集可用光線,但這并不意味著總能得到更好的圖像質(zhì)量。一個擁有較小像素的傳感器在覆蓋相同光學(xué)面積的情況下,其性能可能超過擁有較大像素的傳感器。從2000年開始,在ADAS等高分辨率應(yīng)用中,幾乎都采用了2.1μm。安森美最新推出的系列產(chǎn)品也都采用了2.1μm。
審核編輯 黃宇
-
圖像傳感器
+關(guān)注
關(guān)注
68文章
1883瀏覽量
129453 -
汽車
+關(guān)注
關(guān)注
13文章
3423瀏覽量
37166
發(fā)布評論請先 登錄
相關(guān)推薦
未來數(shù)字孿生的潛在發(fā)展方向
“智能網(wǎng)聯(lián)汽車全球十大發(fā)展突破”在京發(fā)布

索尼圖像傳感器芯片有哪些
圖像傳感器芯片的發(fā)展趨勢是什么?
圖像傳感器的原理是什么?
方向角度傳感器壞了有什么影響
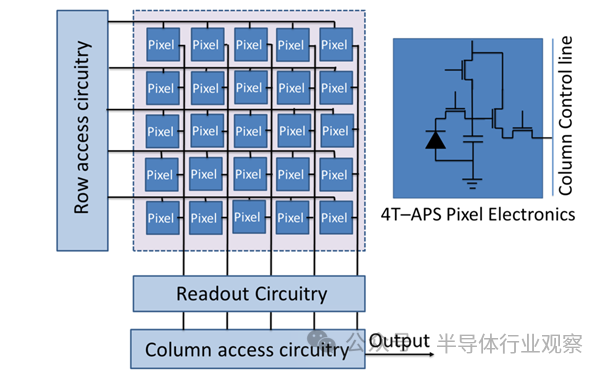
簡單認(rèn)識CMOS圖像傳感器
嵌入式熱門發(fā)展方向有哪些?
安森美汽車圖像傳感器發(fā)展趨勢

DC電源模塊的未來發(fā)展方向與挑戰(zhàn)

思特威推出CMOS圖像傳感器新品SC038HGS
圖像傳感器芯片堆疊架構(gòu)與先進(jìn)互連技術(shù)解析
關(guān)于圖像傳感器圖像質(zhì)量的四大誤區(qū)!你踩過幾個坑?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論