 EtherCAT主站控制器系統實時性測試
EtherCAT主站控制器系統實時性測試
EtherCAT作為高效的現場總線網絡技術,其實時性能需依賴高實時操作系統才能充分展現。本文以ZMC600E為例,測試系統實時性并分析操作系統抖動數據。
ZMC600E EtherCAT主站控制器 是廣州致遠電子股份有限公司開發的新一代智能總線型控制器,其采用多核異構應用處理器為核心,其內核包括2個64位的ArmCortex-A53核,主頻1.0GHz;4個Cortex-R5F內核,主頻800MHz。同時板載1GB DDR4、4GB eMMC以及32KB FRAM。
ZMC600E EtherCAT主站控制器應用于機器運動時,為了確保精確的控制和協調動作,保證機器的運行穩定性和精度,ZLG致遠電子在開發過程中,根據多年深耕嵌入式領域的積累,對操作系統做了深度優化,提供了穩定可靠的RT補丁進行Linux系統的適配,并反復測試優化,得到了較好的系統抖動參數。下面使用一個用于測試評估操作系統實時性能的工具“cyclictest”來實測。
 ?測試工具介紹“cyclictest”的測試原理,是基于周期性任務的調度和執行,去創建一個或多個周期性任務,并通過設置任務的優先級和調度策略來模擬實時任務的運行。這些任務會在固定的時間間隔內不斷運行,并記錄每次運行的開始和結束時間。通過這些時間數據進行分析,便可得到任務的響應時間和延遲情況。 ?測試步驟1. 準備好1臺測試電腦、1臺ZMC600E控制器、1臺可輸出24V的穩壓電源、1條網線。
?測試工具介紹“cyclictest”的測試原理,是基于周期性任務的調度和執行,去創建一個或多個周期性任務,并通過設置任務的優先級和調度策略來模擬實時任務的運行。這些任務會在固定的時間間隔內不斷運行,并記錄每次運行的開始和結束時間。通過這些時間數據進行分析,便可得到任務的響應時間和延遲情況。 ?測試步驟1. 準備好1臺測試電腦、1臺ZMC600E控制器、1臺可輸出24V的穩壓電源、1條網線。

2. 穩壓電源設置為24V/1A,網線連接ZMC600E控制器的NET1和測試電腦的網口。打開電源,給ZMC600E控制器供電。

3. 測試電腦IP設置為192.168.1.168,并通過ping包工具確認可以ping通ZMC600E的NET1的IP地址:192.168.1.136。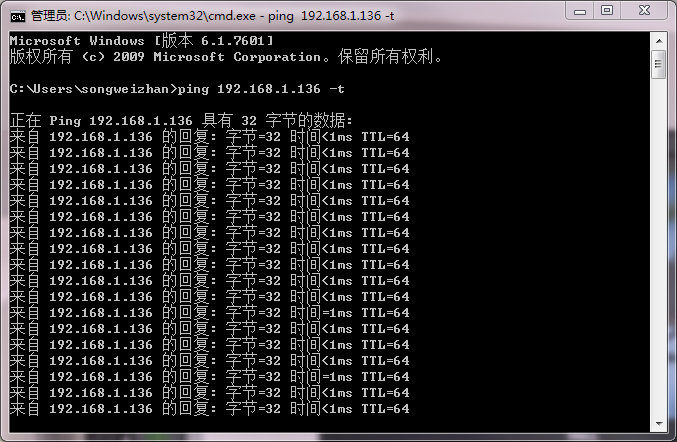 4. 測試電腦打開串口調試工具“Putty”,在“Host Name”欄填入工控板的IP地址”192.168.1.136”,Port欄輸入“22”,選中“SSH”協議,如圖4所示。并點擊“Open”連接到ZMC600E控制器。
4. 測試電腦打開串口調試工具“Putty”,在“Host Name”欄填入工控板的IP地址”192.168.1.136”,Port欄輸入“22”,選中“SSH”協議,如圖4所示。并點擊“Open”連接到ZMC600E控制器。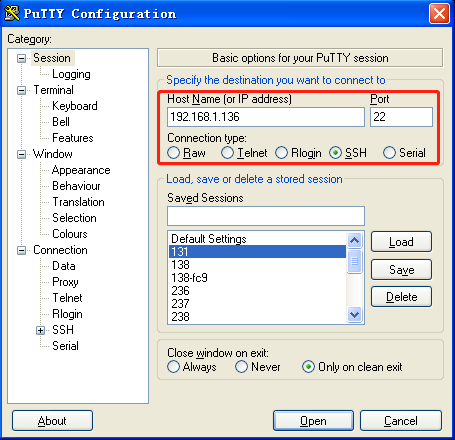 5. 輸入用戶名“root”和密碼“root”,登陸后,輸入“cd /usr/bin”進入bin目錄,再輸入“cyclictest -p 98 -t 1”命令進行測試。
5. 輸入用戶名“root”和密碼“root”,登陸后,輸入“cd /usr/bin”進入bin目錄,再輸入“cyclictest -p 98 -t 1”命令進行測試。

6. 保持測試環境在連續大概15個小時的系統抖動性測試中,得到輸出結果:最大抖動為98us,平均抖動為15us。
?測試結果分析
按照同樣的方法,分別測試ZMC300E 和 ZMC900E EtherCAT主站控制器的系統抖動數據,得到以下表格。
型號 | ZMC300E | ZMC600E | ZMC900E |
平均抖動 | 18us | 15us | 3us |
最大抖動 | 67us | 98us | 11us |
通過測試步驟及測試結果可知,不同的產品平臺,系統的實時性能不一樣。其中ZMC300E是通過Xenomai補丁實現系統的實時性,ZMC600E和ZMC900E是通過RT補丁實現系統的實時性。為了確保精確的機器控制和協調動作,保證機器的運行穩定性和精度,需要盡可能減小EtherCAT主站操作系統的抖動,才可以充分發揮EtherCAT的先進網絡性能。
ZMC300E/ZMC600E/ZMC900E選型表如下。

-
測試
+關注
關注
8文章
5164瀏覽量
126474 -
控制器
+關注
關注
112文章
16204瀏覽量
177421 -
ethercat
+關注
關注
18文章
654瀏覽量
38605
發布評論請先 登錄
相關推薦
EtherCAT轉Profinet主站協議轉換網關(JM-PNM-ECT)

EtherCAT主站轉Modbus TCP從站協議網關(JM-ECTM-TCP)

EtherCAT從站轉Profinet主站協議網關(JM-PNM-ECT)
基于全志T507-H的Linux-RT + Igh EtherCAT主站案例分享
【昉·星光 2 高性能RISC-V單板計算機體驗】EtherCAT主站
基于 RT-Thread專業版的EtherCAT主站方案

ZMC900E控制器之ROS2環境安裝指南

在研華科技的嵌入式IPC上設置實時Linux和EtherCAT主站
電機控制領域如何實現CANopen設備接入EtherCAT主站控制器
【米爾-瑞薩RZ/G2UL開發板】6.基于SOEM的EtherCat主站
開放式高實時高性能PLC控制器解決方案-基于米爾電子STM32MP135
ZMC900E 國產EtherCAT主站控制器 — 電源口傳導騷擾整改





 工商網監
工商網監
評論