 如何利用RTC秒上升沿的原理設計一種低功耗、高精確時鐘同步方案
如何利用RTC秒上升沿的原理設計一種低功耗、高精確時鐘同步方案
時鐘同步的應用廣泛,但常規的時鐘同步方案或對終端設備要求高,或原理相對復雜。對此,本文利用大普的RTC秒上升沿即時生效原理,設計一種低功耗、高精確時鐘同步方案。
時鐘同步的應用涵蓋通信、交通、電力、視頻、醫療、金融、教育等領域,在低功耗的設備上提高時鐘的同步精度具有較高的應用價值。
1.時鐘同步的概念及精度影響因素
時鐘同步,也稱為時間同步或對鐘,是確保多個終端設備與時鐘源的時間保持一致的過程。時鐘同步的目的是為了消除時鐘偏差,從而實現精確計時或者多終端協調操作。
時鐘同步的精確性主要受三個方面影響——主設備(時鐘源)時鐘精度、傳輸途徑和從設備(終端)時鐘調整分辨率。時鐘源一般選擇時鐘服務器或者GNSS,對于要求不高的局域組網,主設備甚至可以通過系統時鐘自己生成參考時鐘。傳輸途徑的影響可大可小,在傳輸途徑相對一致的情況下,它的影響較小甚至可以忽略。本文僅探討傳輸途徑一致的情況,因此,從設備(終端)時鐘調整分辨率是整個同步網絡的關鍵,決定了整個系統同步精度,是設計環節的著力點。
2.時鐘同步的設計原理
為了方便測試,以下使用大普時鐘服務器DP4000[1]作為時鐘源。RTC使用大普INS5T8900[2],與MCU一起組成從設備。
MCU從時鐘服務器獲得TOD信息和1PPS信號,再根據系統同步指令,通過IIC接口對RTC進行設置,最終達到RTC的時間和服務器時間同步的目的。
市場上RTC的時間寄存器分辨率一般精確到秒,但本文將探討基于RTC,如何進行毫秒甚至微秒級別的時鐘同步設置。其主要原理是利用大普的RTC秒上升沿即時生效原理——即秒上升沿會移動到秒設置生效的位置,當MCU捕捉到時鐘服務器輸出1PPS上升沿時,對RTC進行秒的寫操作,即能實現精準時鐘同步。工作原理框圖見圖1。
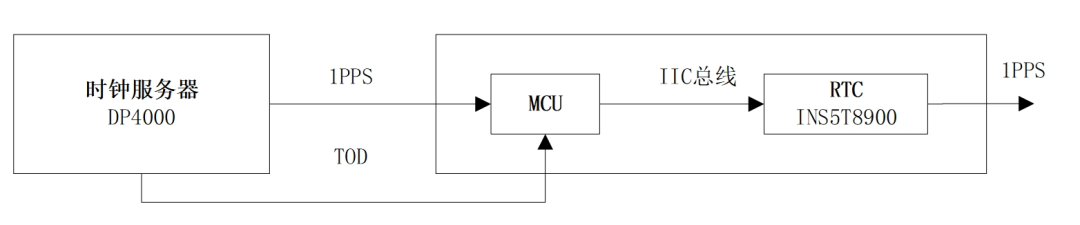
圖1 同步原理框圖
3.時鐘同步的具體實現
基于上述原理,理想的設置狀況是指令即時生效,但實際使用過程中每個環節都會有誤差。要達到更高精度的時鐘同步,需要盡可能減少同步誤差。
3.1誤差確認
減少誤差需要先分析和確認誤差。如圖2所示,圖中T1是MCU軟件操作時延和IIC指令時延,主要和單片機以及IIC速率有關系。硬件和軟件系統確定后,T1即為固定值。T2是IIC操作生效到秒上升沿變化時間差,是RTC同步誤差,主要由RTC內部邏輯電路確定,也是固定值。T3為T1和T2之和,即總誤差。
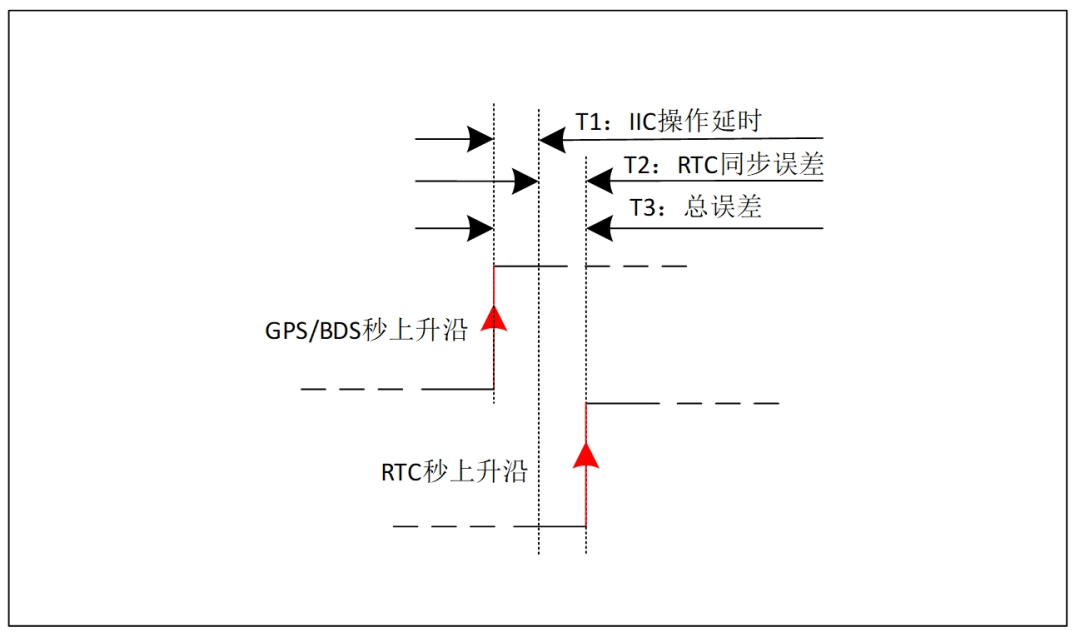
圖2 誤差確認
3.2誤差校準
確認誤差之后,需要對誤差進行校準。如上文所述,總誤差為固定值T3,那么校時起點若相對于GPS/BDS秒上升沿提前T3,就能實現精準的秒上升沿同步。如圖3所示。
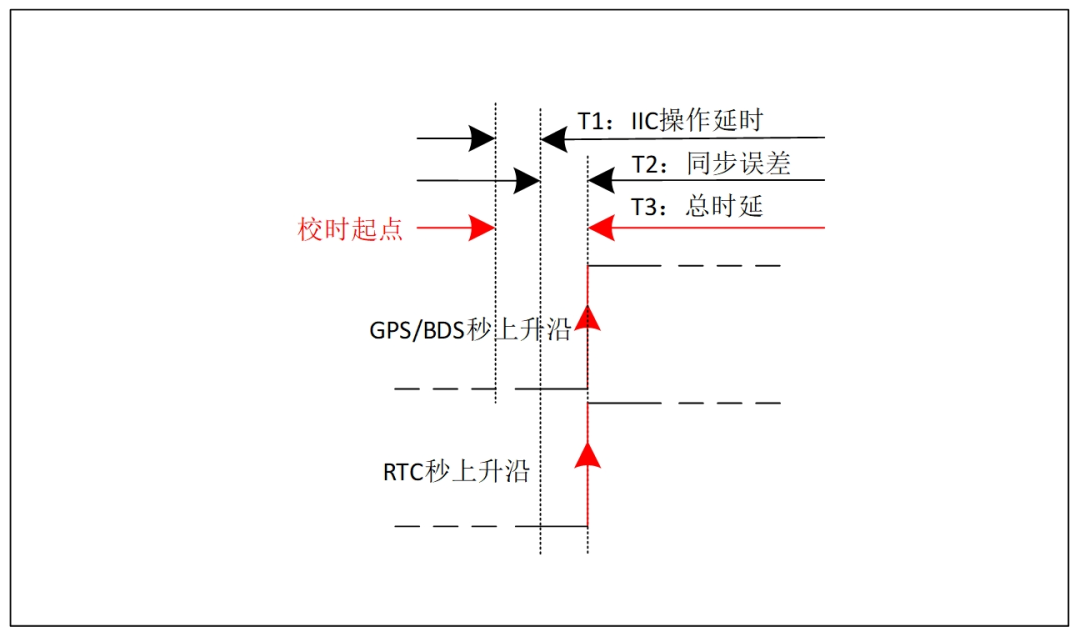 圖3 誤差校準
圖3 誤差校準
4.時鐘同步的測試驗證
按照以上原理進行了測試驗證。實際測試結果顯示,經過誤差校準后,RTC輸出的1PPS(綠色)和服務器輸出的1PPS(黃色)同步精度非常高,相位偏差在±10us[3]內,實現了微秒級別的時鐘同步。
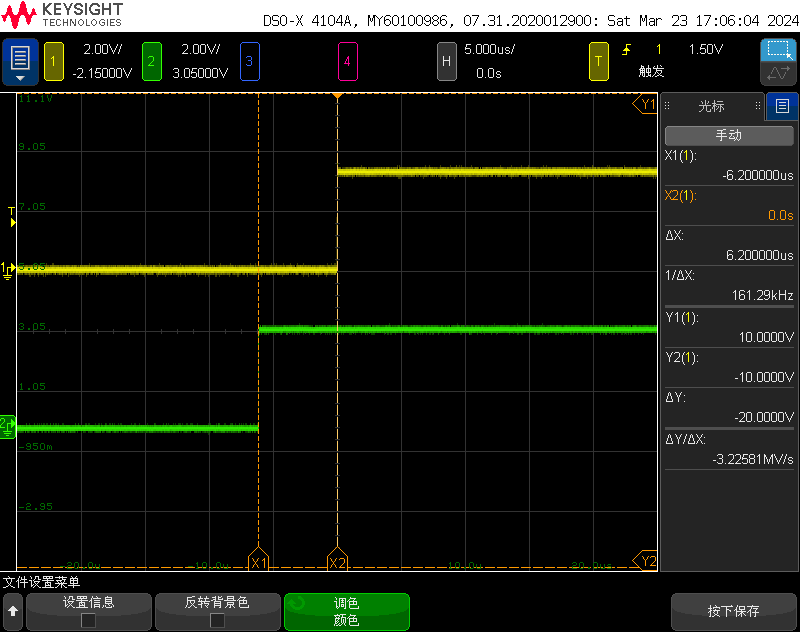
圖4 校準后實測
綜上所述,大普的RTC INS5T8900,采用秒上升沿即時生效原理,實現了低功耗精準時鐘同步。結合大普RTC配置靈活、可定制化設計等特點,越來越多的應用場景將被挖掘和實現。
注[1]:大普的時鐘服務器-DP4000關鍵特性:
(1)支持GNSS
(2)GPS/BDS/GLONASS/Galileo
(3)支持IEEE1588v2、1PPS、頻率輸入等多種參考源
(4)全協議支持 IEEE1588v2、NTP、SyncE
(5)滿足PRTC-B標準
(6)頻率準確度:±1.0E-12(跟蹤衛星)
(7)支持128/256個從時鐘
(8)相位精度: ±20ns/±50ns(跟蹤衛星)
(9)保持能力:± 1.5μs/24 小時 (△T=±10℃)
(10)多種接口類型,接口可定制
注[2]:大普的RTC-INS5T8900關鍵特性:
(1)低功耗:1.0uA(典型)
(2)超高穩定度:
±3.4ppm @ -40℃~+85℃
(3)內置晶體:32.768kHz
(4)內置溫度傳感器
(6)電壓輸入范圍:1.6V ~ 5.5V
(7)溫度范圍:-40℃~+85℃
(8)可配置輸出,如1PPS等
(9)封裝尺寸:3.2* 2.5*1.0mm
注[3]:不同設計方案實際測試精度有差異,本測試值僅供參考。
審核編輯:劉清
-
溫度傳感器
+關注
關注
48文章
2854瀏覽量
155315 -
寄存器
+關注
關注
31文章
5253瀏覽量
119201 -
RTC
+關注
關注
2文章
511瀏覽量
65897 -
GNSS
+關注
關注
9文章
723瀏覽量
47636 -
IIC接口
+關注
關注
0文章
23瀏覽量
11632
原文標題:基于RTC的低功耗精準時鐘同步
文章出處:【微信號:大普通信,微信公眾號:大普通信】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于微控制器的溫度補償超低功耗實時鐘解決方案
使用HAL庫RTC時鐘喚醒低功耗STOP和STANDBY模式
時鐘芯片RTC-4553的原理及應用
一種北斗/GPS秒脈沖高穩同步時鐘源

STM32F1系列使用HAL庫低功耗STOP和STANDBY模式喚醒(RTC時鐘喚醒+外部中斷喚醒示例)






 工商網監
工商網監
評論