 速銳得新型智能車載CANBUS數據采集OBD接口傳輸及取電安裝應用方式
速銳得新型智能車載CANBUS數據采集OBD接口傳輸及取電安裝應用方式
大數據時代的當下,作為車載行業的設備終端,基本要與數據掛鉤,不僅要連接OBD或者CANBUS,還要求有大量的數據交互,在ADAS、DMS、車輛動態監控、發動機性能檢測、公車及出租車的車隊管理,還是礦卡工作時長監控等方面,應用都非常廣泛。
那么,我們需要解決幾個問題:
一、車載設備要的數據從哪里來?
基于車輛本身的數據,在行業這邊的應用,主要有2端,A、OBD接口。絕大部分車型都標配了OBD接口,不管是汽油車、柴油車、還是新能源及商用車等智能汽車,就連叉車,新款的也是帶有OBD自動診斷系統接口的;B、CAN總線網絡。據統計,國內的汽車在2013年后就標配了OBD2標準,當時的年代里,有85%以上用的是CAN2.0的數據接口網絡,我們在2016年做4S集團試乘試駕管理系統中,實際測試滿足CAN網絡標準的車型就達到了96.5%,可見,當下的情況,幾乎99%用的是CAN網絡了。
那么,通過OBD接口來采集數據,無疑是最簡單的方式。OBD在整車網絡上,本身就是一個重要的節點,但是真的把這一塊做好,做深是有難點的。之前的文章中也有提到過一些特殊情況,比如造成汽車不休眠、發動機起停技術的誤判、干擾ECU、CAN網絡通信故障、速率控制不對,請求指令錯誤、鎖車報警等等一系列的問題,這里不再贅述。

二、OBD采集數據的頻率
我們的方法是默認采用240ms對ECU請求,這個速率下,98%以上的車型都不會造成干擾,因為速率足夠慢,如果ECU不返回的數據,我們就跳過,顯示為空白。那么在下一包數據過來的時候,基本會有,大家可能認為,哎呀,數據這么慢,我怎么處理我們的上位機系統呢,這就要根據數據的多少,緊急性來區別。部分數據本身在整車上就傳輸得比較快,這種數據,反饋自然也就快,有的數據傳輸得慢,請求快了會造成網絡堵塞,還沒有數據返回。行業里,大多的通病就是“越快越好”,其實這里邊的“節奏”就體現了對車的理解,存在的高低之分,所以也決定了企業的生死。
這是個哲學問題,所有快的東西,絕大部分都不是好的,花開需要時節,稻穗成熟需要時間,孩子長大需要經歷,太早凋謝,催熟都是手段,而不是目的。比如我們要把一個芯片測試好,我們就需要大量的樣本,沒有大量的樣本,我就不能說我的“好”,測試樣本需要時間、需要周期、需要不同的環境,經過大量測試的樣本,那就是好的定義。
三、通過OBD接口采集車身私有協議下的控制系統數據,可能會存在的問題:
1、網關數據隔離,車載網關直接把數據隔離起來,不對OBD接口輸出數據,所有OBD請求的數據過來,網關這邊都要做識別,包括指令、速率、反饋。
2、指令不對。涉及的車型越多,指令越復雜,很多車都沒有指令可供請求,那么我們就需要破解診斷儀的“動作測試”中的請求與反饋,那么我們采用中斷式診斷請求,進入診斷儀請求模式。診斷請求數據是再比如停車、修理、維護的條件下,車是不運動的情況,請求一個的CAN ID 獲得 ECU反饋。以喇叭鳴笛信號舉例,我們需要連接通用診斷儀X431,然后通過X431發送鳴笛信號,界面上是“動作測試”。這個情況,在停車情況下,修車情況下可以用,因為接入了X431,并獲得X431授權,ECU處于診斷模式,通過CAN監聽工具,抓取X431發送請求的指令(車廠授權診斷儀廠家的),然后,X431給出反饋,請求后會有對應回復一包數據,通過這個方法,獲得喇叭信號。
3、對ECU造成干擾。我們還以喇叭信號舉例的話,你要請求多快?項目就只用這么一個信號嗎?這就造成了單一信號,或者不是多個信號請求頻率的問題,可能X431也沒辦法請求獲得這個指令,比如涉及汽車安全的“一票否決”的控車指令及其他涉及行車安全的指令,或者X431也沒有這么快的反饋,又回到第二大點的問題,造成各種困擾,這些困擾,其實都是請求數據過程中對ECU造成的干擾,為什么有的OBD就是活不了,為什么有的就越做越好,值得思考。
四、速銳得結合OBD特性給了新方法
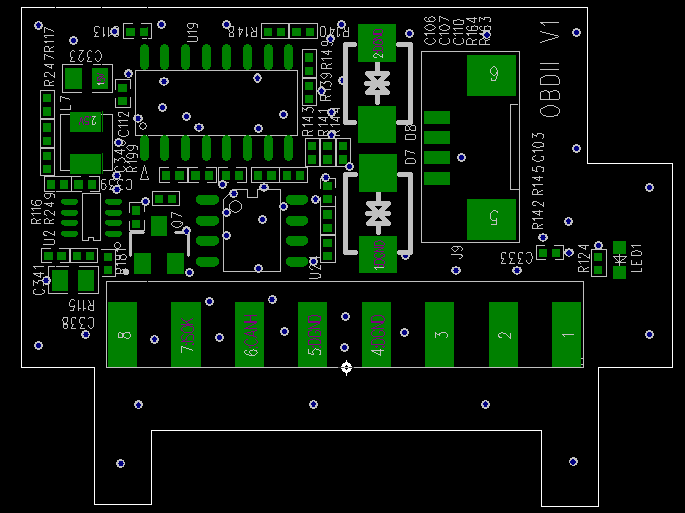
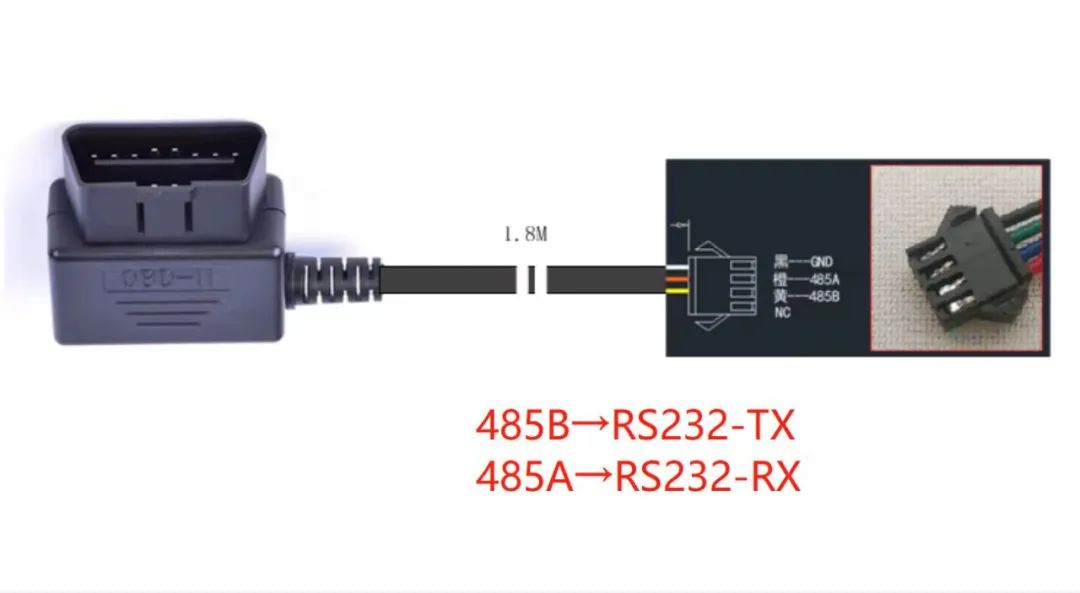
首先是數據部分,OBD部分根據上述的經驗和磨合,這一塊,不要客戶自己去開發。因為開發OBD這個領域是跟車型、年份、總線、車載通信網絡、速率、零部件等相關的,有的高精度的傳感器數據每秒是300萬的單個數據量,這個一般企業沒涉及過的根本處理不過來。思拓的辦法是把OBD集成到一個小組件里,直接通過串口,比如TTL、RS232、RS485對外輸出數據,這個形態可能有多種,包括對接車載上位機的接口也存在多種多樣,但是至少有一點,OBD的核心部件是不用太擔心的。
其次是供電部分,OBD能有效地對上位機提供供電功能,在OBD接口的16腳就是一個常電,不管是停車熄火還是啟動汽車狀態,都具備供電的特性。看上去這里只是需要連接一條線,但會引申出一個問題,車載設備,比如ADAS、DMS、駕校學時機、4G網關或者別的,如何來保證功耗。汽車的電瓶是有容量的,有容量那么在停車熄火的時候就會有功耗。那么就要結合OBD的數據來做判定了,判定的條件還不止于一種。
其中重要的邏輯包括:
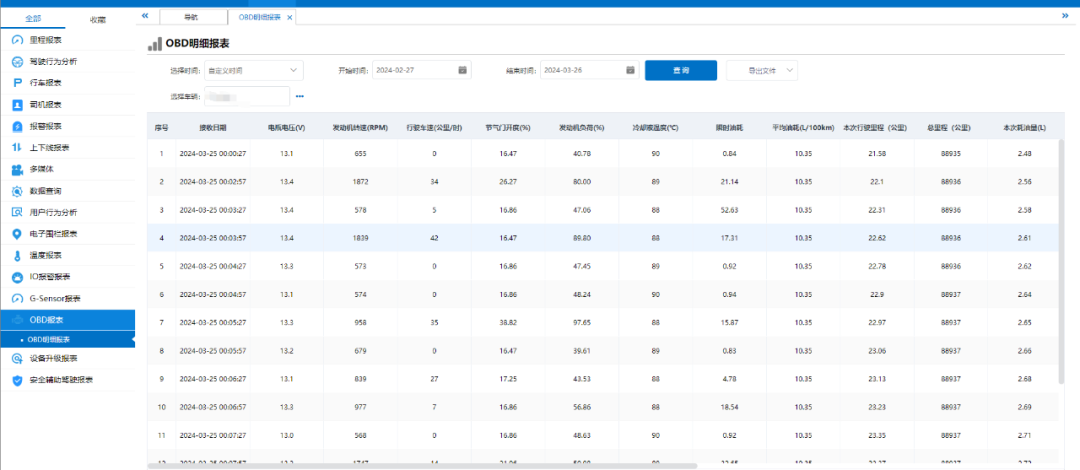
1、電壓:基本的邏輯為汽車熄火狀態一般為12V,最低點火電壓10.8V,汽車點火后一般在13.5V,最高達到14.8V,大型硬派越野車電壓可以達到15V;
2、轉速:常規熄火轉速為0,點火后的轉速最低位大概在550轉,部分冷車點火轉速達到2200轉,只要設置400轉速的閾值,另外補充熄火后部分車型固定轉速不變的情況做排除;
3、水溫:汽車點火后的水溫一般都不會為0或者為空,熄火后的水溫有華氏度和攝氏度兩個類別;
4、發動機運行時長,汽車點火工作后,發動機開始運行,ECU控制單元會記錄發動機運行時長,就像飛機一共多少飛行時間的結果一樣,這個數據有點火到熄火的值,也有累計值,但是累計值,我們一般不做參考,其他汽車市場應用也極少,我們只作為判斷邏輯之一。在發動機自動啟停下,轉速為0,水溫不為0,電壓變低,但有發動機運行時長。
五、結語
以上,當數據和供電結合到一起,再結合最后客戶端上位機的應用,基本上都能解決大部分項目中的問題,這也是速銳得新型智能車載CANBUS數據采集OBD接口傳輸及取電安裝應用方式核心所在。
應用舉例:商用車里面還有個典型的應用,就是通過CAN數據獲取左右轉向信號,基于這個信息來處理ADAS車道偏離報警,比如核心要解決誤判報警的問題。如果ADAS攝像頭識別到車輛跨越車道線,且有轉向信號,AI算法就判斷為正常變道。如果沒有轉向信號,ADAS主機即刻發出車道偏離預警信息,在本地提醒司機做出糾正,同時上報平臺主動安全報警事件。現在很多都是通過IO信號線,接車輛左右轉向燈的信號來獲取,前裝車廠的ADAS是通過CAN來獲取轉向信號,這也是為什么以色列能做十年沉淀,我們搞后裝的接觸不到這塊,那么對這個數據的要求,可能實時性可能就沒那么快只是我們國內沒有企業去積累
我們采集的數據,都是工具,完成匹配好項目所需,才是目的。很多項目中,客戶不懂汽車、電子、總線、邏輯,一再強調功能、功能、功能,就會陷入“功能誤區”,功能越多,系統越復雜,涉及面就越是廣泛,另外還有車型、品牌、年份、總線通信邏輯等多種的不同。測試的范圍越廣、車型越多,暴露出來的問題也就越多。像第一章節中所說的問題,很多就是致命的,這些問題處理不到,就會導致一個項目掛上東南枝,或者讓一個數據開發企業走向無盡深淵。
審核編輯:劉清
-
CAN總線
+關注
關注
145文章
1937瀏覽量
130640 -
網絡通信
+關注
關注
4文章
793瀏覽量
29761 -
車載終端
+關注
關注
0文章
62瀏覽量
11632 -
數據交互
+關注
關注
0文章
30瀏覽量
10475 -
ADAS系統
+關注
關注
4文章
226瀏覽量
25681
原文標題:速銳得新型智能車載CANBUS數據采集OBD接口傳輸及取電安裝應用方式
文章出處:【微信號:Thread_IOV,微信公眾號:速銳得車聯網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
WiFi開啟車載自動診斷系統(OBD)新形態
CANBUS總線數據采集模塊
OBD在車載GPS中的應用方案
【數據采集分享】基于LABVIEW的USB接口高速數據采集的設計
高速數據采集卡的10GBE以太網傳輸解決方案
FPGA實現數據采集的方式對比(傳統串口、數據采集卡及外設計接口)
一種計算機控制的智能車載導航裝置
JT808協議實現及obd數據采集源碼
速銳得2020年車聯網TBOX硬件及CAN總線數據采集布局
速銳得解碼新款豐田大燈總成CAN矩陣拆解和結構分析
速銳得新型智能車載CANBUS數據采集OBD接口傳輸及取電安裝應用方式






 工商網監
工商網監
評論