 如何利用GSG-721與ublox GNSS接收機實現RTK功能仿真?
如何利用GSG-721與ublox GNSS接收機實現RTK功能仿真?
作者介紹
一、前言
實時動態載波相位差分技術(RTK)是應用測量來糾正當前衛星導航(GNSS)系統的常見誤差。RTK定位是基于至少兩個GNSS接收機——參考站和一個或多個流動站。參考站在可視衛星中獲取測量數據,然后將這些數據和它的位置一起廣播給流動站。流動站也收集衛星的測量數據,并將其與參考站傳輸過來的參考校正RTCM數據一起處理,實現厘米級的定位精度。
RTK技術在許多領域都有廣泛的應用,特別是在地理測量、土地測繪、建筑施工和機器導航等領域。它可以提供高精度的位置信息,使得在這些領域中進行精確測量、定位和導航成為可能。
今天,德思特術工程師何佳壕為您介紹如何利用GSG-721 GNSS模擬器與RTCM功能插件實現一次RTK功能仿真!
二、了解Skydel RTCM插件
德思特GNSS模擬器可以在本地實現RTK的仿真,Skydel RTCM 插件允許模擬來?基站的 RTCM 3.3消息,??需為基站接收器?成真實的射頻信號。RTCM 消息可以通過串行端?連接或 NTRIP從 Skydel 應?程序流式傳輸到流動站接收器。
三、測試目的
本次測試我們將模擬GPS L1+L2,BEIDOU B1+B2信號輸出一個圓形軌跡,并針對RTK開啟與否對定位精度的影響做對比。
四、測試前準備
(一)測試器材檢查
本次測試我們需要用到的硬件有:
● GSG-721 GNSS模擬器以及配套的顯示器、鼠標、鍵盤
● Ublox GNSS接收器,型號:C099-F9P-0,支持RTK功能
● 安裝了ublox上位機軟件u-center 23.08version的PC一臺
● 路由器,提供本地網絡與可能用到的VPN網絡
● 其他連接用配件
(二)測試連線
測試中共有三套測試連線:
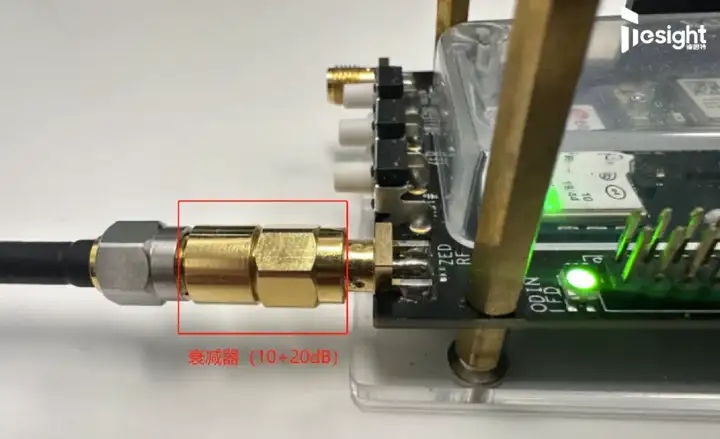
①射頻組:GSG-721的前面板GNSS仿真信號端口出接出線纜,加入10dB+20dB衰減器(公進母出),接入Ublox GNSS接收器左上角ZED端口。
②網絡組:外部以太網接入到路由器WAN端口,LAN1接出至GSG-721后面板以太網端口;LAN2接出至安裝了ublox上位機軟件的PC以太網端口。
③電源組:GSG-721后端直接接入220V交流電,Ublox電源線與數據線是分開的兩條線纜,需要都接入到目標PC上。
至此,我們就完成了基本的連線。
五、測試配置——GSG-721 Skydel界面配置
(一)軟件license檢查
打開Skydel主界面,點擊"Help"-“About GSG-7”,檢查是否具有相關星座選件、MULTI選件、RTK選件。
(二)基準站(Base)配置
1.預保存
打開一個Skydel實例,開始一個新的配置,此處可以“ctrl+s”將該配置做預保存,命名為Base以方便后續區分。
2.輸出信號設置
導航到Settings – Output(設置 - 輸出),選擇NoneRT,雙擊兩次,分別選擇:
● GPS L1CA+BEIDOU B1
● GPS L2C + BEIDOU B2

3.時間同步
在Setting設置->Vehicle車輛->Body車身中選擇參考站位置。將軌跡類型設置為“Fixed固定”,并輸入坐標經緯高=(-73°,45°,2)。
4.RTCM配置
將RTCM插件加載到配置中。進入Settings設置->Plug-ins插件,選擇Add Plug-in添加RTCM插件。設置插件實例的名稱和類型,并選擇 "OK"。選擇新的插件,在本案例中我們將使用Ntrip直接傳輸。
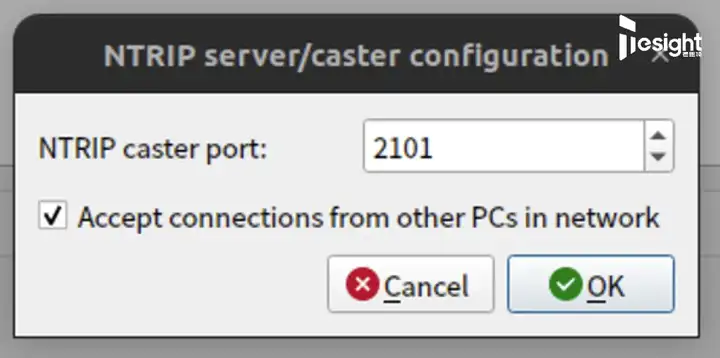
①勾選Ntrip選項,點擊右側“config”
②可設置端口號默認為2101,勾選:Accept connections from other PCs in network
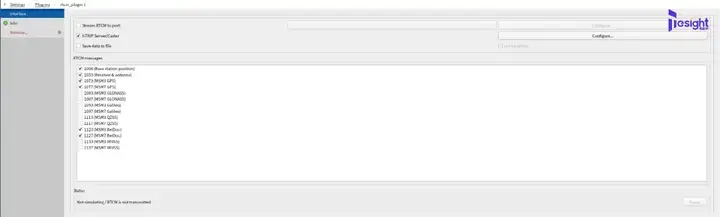
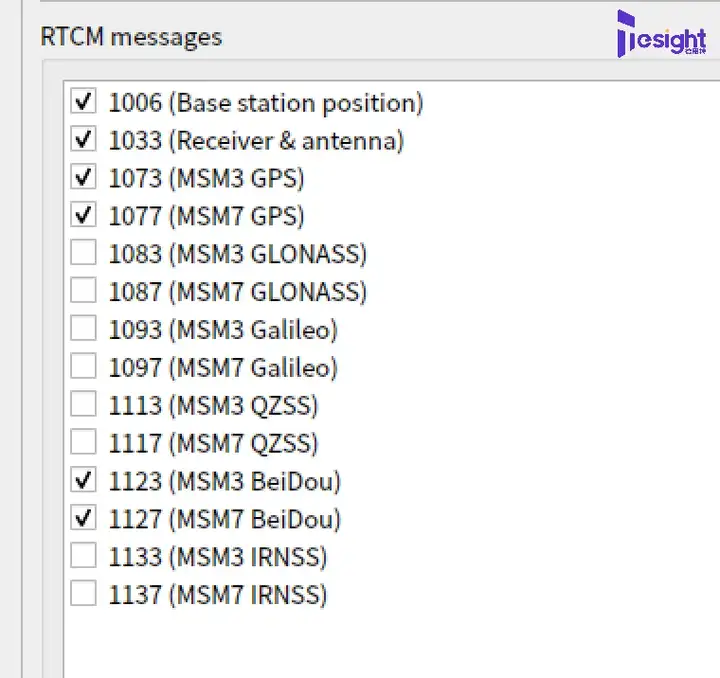
③根據GNSS星座需求,配置對應的RTCM消息類型,本例中選擇:
1006,1033,1073,1077,1123,1127
④打開命令行,輸入“ifconfig”,獲取本機IP地址192.168.100.255:
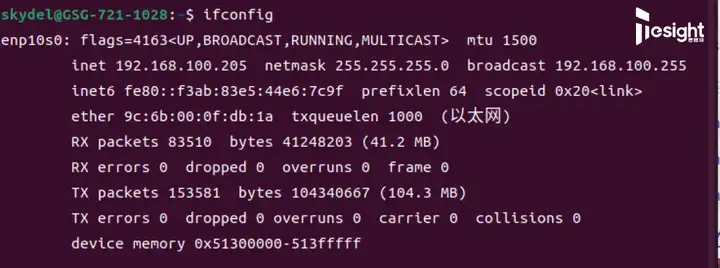
至此,我們完成了基準站配置。
(三)流動站(Rover)配置
1.預保存
新打開一個Skydel實例,開始一個新的配置,此處可以“ctrl+S”將該配置做預保存,命名為Rover以方便后續區分。
2.輸出信號設置
與基準站配置一致:導航到Settings – Output(設置 - 輸出),選擇DTA-2116,雙擊兩次,分別選擇:
GPS L1CA+BEIDOU B1
GPS L2C + BEIDOU B2

3.時間同步
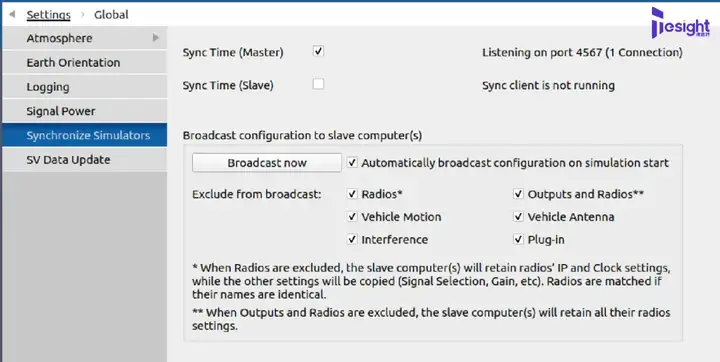
進入Settings設置->Global全局->Synchronize simulators,設置復選框Sync Time(Master),這將允許參考站模擬與流動站模擬同步開始。設置復選框"Automatically broadcast configuration on simulation start"。在Exclude一欄,勾選所有選項。
4.設置車輛軌跡
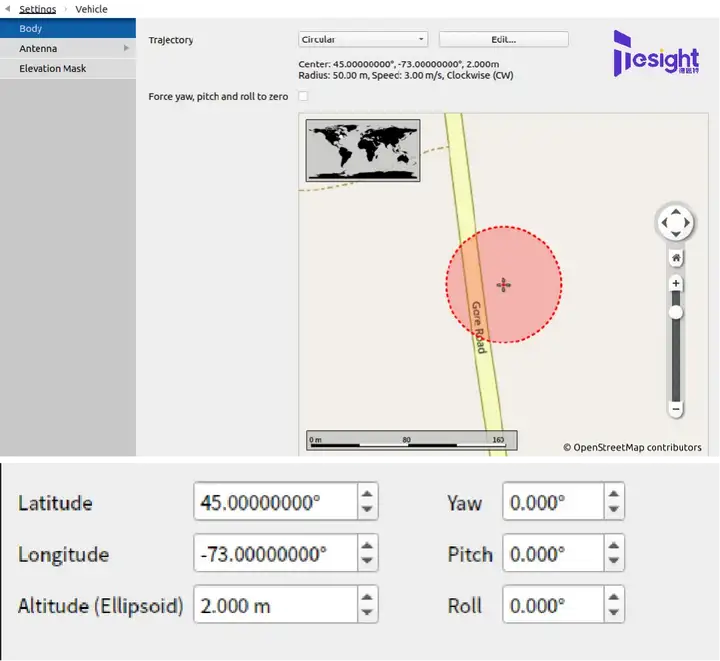
在Settings設置->Vehicle車輛->Body車身中選擇參考站位置。將軌跡類型設置為"Circle(圓形)",并輸入坐標經緯高=(-73°,45°,2),軌跡半徑為50m,速度、方向默認。
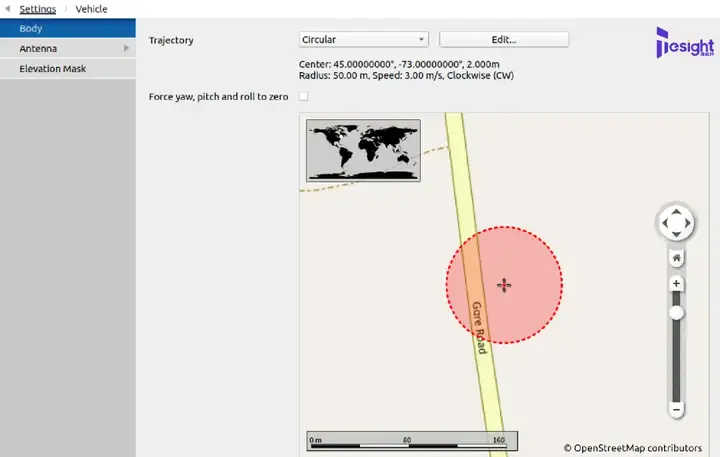
保存配置,至此我們完成了流動站配置。
(四)ublox u-center設置
1.連接
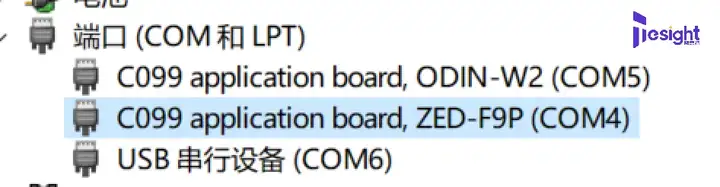
①在準備好的PC上連接ublox接收機,打開設備管理器,查看串口號,本例中串口號為COM4。
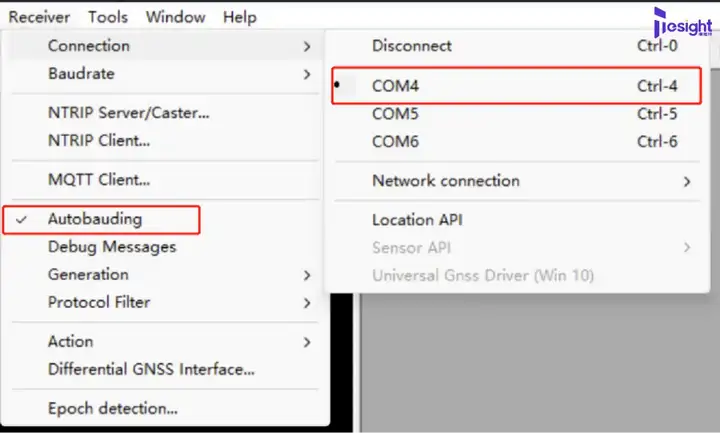
②打開u-center,在上方receiver選擇對應串口COM4,設置波特率模式為:“Autobauding”,等待連接成功。
2.觀測無RTK情況
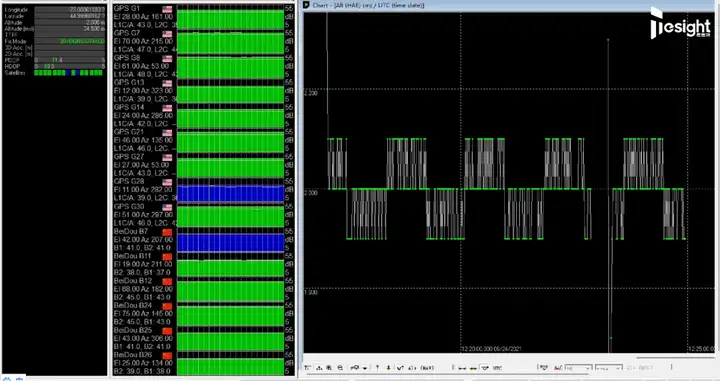
在Skydel中選擇“Rover”實例,點擊“Start”,Ublox中打開GNSS信號觀測窗口、Chart圖,點擊冷啟動,等待信號穩定后,觀測到定位模式為3D,觀測高度偏移:
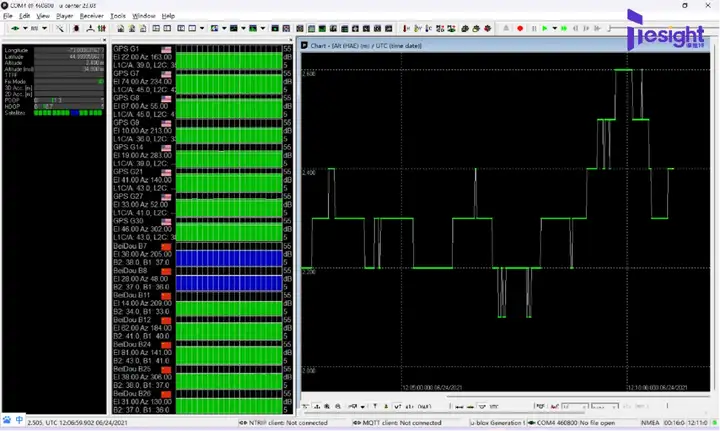
可以看到設置高度為2m,但是定位結果并沒有在2m附近穩定下來,最高達到了2.6m,定位偏差基本在0.1-0.5米內。
3.觀測有RTK情況
①進入U-Center,點擊Receiver中的 "NTRIP Client":
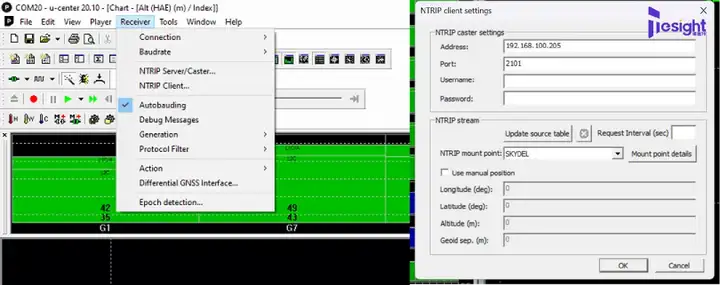
②在這個窗口中,輸入之前GNSS模擬器所在的IP地址與Ntrip端口號:
● IP:192.168.100.255
● Port:2101
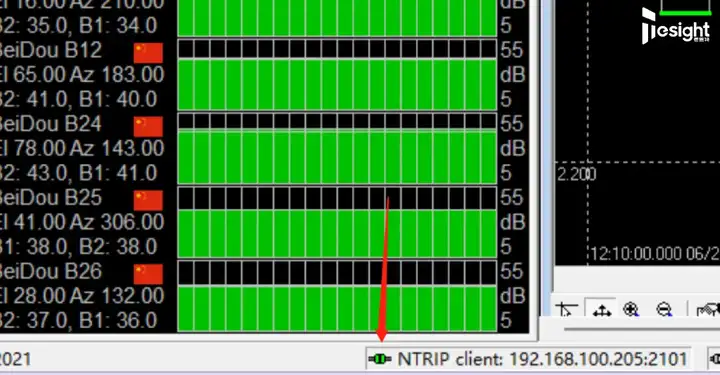
點擊更新源表,出現Skydel后選擇OK,此時下方Ntrip端口變綠,RTCM消息開始推送。
③冷啟動設備,等待信號穩定,定位模式變為3D/DGNSS,觀測高度偏移,我們注意到這次的高度是穩定的,精確定位到高度為2m,誤差區間為±0.1米,即RTK功能正常發揮作用。
END
通過此次文章,您是否已經了解到如何利用GSG-721與ublox GNSS接收機實現RTK功能仿真?如果您在操作中有問題或想了解更多,歡迎聯系德思特!
關于德思特
德思特是原虹科測試測量事業部孵化出來的獨立公司,基于超過10年的業務沉淀,德思特公司專注提供電子測試/測量解決方案。主要業務范圍涵蓋:汽車電子仿真及測試、射頻微波及無線通信測試、無線頻譜監測與規劃、無線通信(包括智能網聯汽車無線通信、軌道交通、衛星通信、室內無線通信)、半導體測試、PNT解決方案、大物理和光電測試等。
核心成員具有9年以上的測試測量、無線通信及其他相關行業資歷;技術團隊獲得世界五百強PNT解決方案合作伙伴Safran的GNSS技術及信號仿真和軟件Skydel培訓認證證書、航空航天測試和測量合作伙伴Marvin Test 的自動化測試軟件ATEasy培訓認證證書。
德思特研發部,核心成員獲得國際項目管理師PMP認證資質,并具備LabVIEW、python等多種編程語言能力,優勢能力集中于:HIL測試,半導體測試,EOL測試和質量檢測等多種系統研發集成,擁有10多個實用新型和專利授權。
圍繞汽車電子、射頻微波、通信、航空航天等行業提供專業可靠的解決方案,現有客戶包括華為、德賽西威、蔚來汽車、理想汽車、航天科工集團、清華大學、北京航空航天大學、中電科集團等。
此外,我們還是中國無線電協會、中國通信企業協會、雷達行業協會、RIS智能超表面技術協會等行業協會的會員。
審核編輯 黃宇
-
仿真
+關注
關注
50文章
4041瀏覽量
133413 -
GNSS
+關注
關注
9文章
758瀏覽量
47834 -
RTK
+關注
關注
8文章
127瀏覽量
37469
發布評論請先 登錄
相關推薦
拆解一款RTK接收機硬件

GNSS RTK差分基準站是什么?RTK差分基站應用在哪些領域?

雷達接收機的作用和組成
香港理工大學航空及民航工程學系與思博倫通信合作,成功開展低軌星載GNSS接收機算法驗證

認證級EMI接收機與預兼容接收機的區別
GNSS仿真測試之三種常用坐標系與轉換
接收機的工作原理和主要構成
頻譜儀和接收機的區別
PNT-SG3FS-TR Lantronix品牌 GNSS/GPS模塊
大壩安全監測GNSS接收機:保障水庫安全


接收機的三大故障分析
高精度GNSS接收機尾礦庫監測應用
什么是北斗接收機?你了解北斗接收機嗎?
北斗接收機的功能與應用





 工商網監
工商網監
評論