 航晶微電子HJ4314三相電機驅動電路模塊特性與典型應用
航晶微電子HJ4314三相電機驅動電路模塊特性與典型應用
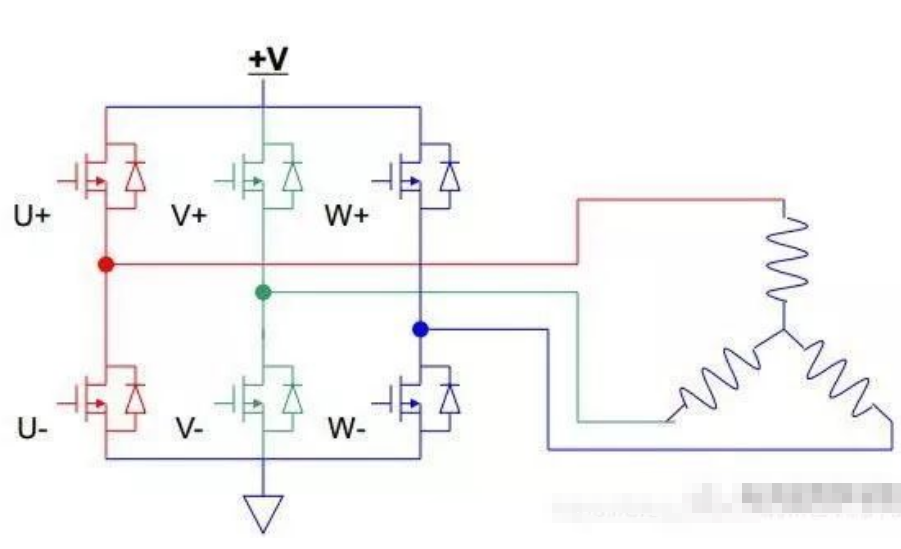
三相無刷電機相對傳統的有刷電機、感應電機而言,它擁有高的轉速/扭矩比、好動態特性、高效率、長壽命、低噪聲、寬轉速范圍和制造容易等等優良特性。使其在工業控制領域、汽車工業、航空航天等等領域有著非常廣泛的應用。
針對此航晶微早期推出了多款電機驅動相關產品,其中HJ4312伺服電機閉環控制器與其搭配的HJG4306三相電機驅動電路模塊這兩款厚膜集成電路在航空28V電機驅動方案應用最為廣泛。為滿足市場需求產品小型化的問題,航晶微結合自身在電機驅動電路方面的積累的經驗,經過不斷學習,現推出一款全新一體化的三相電機驅動電路模塊HJ4314,只需簡單的外圍電路,便可獨立完成對三相無刷電機的控制。

一
概 述
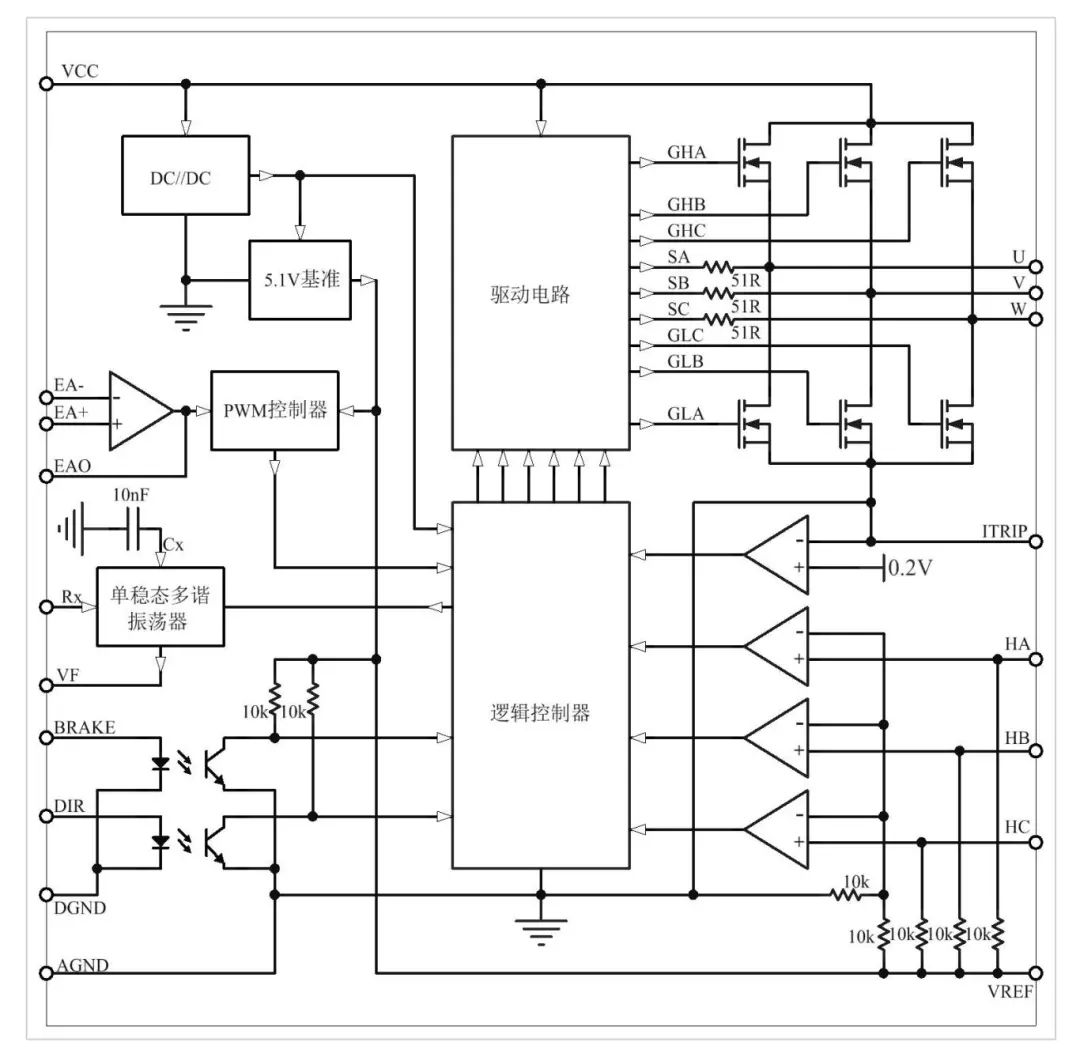
HJ4314是一款完全國產化三相電機驅動電路模塊。內部由三相霍爾解碼器、速度反饋環、單穩多諧振蕩器、PWM控制器,電流門限比較器、高精度電壓基準等部分組成。
原理是三相無刷電機霍爾信號固定脈寬后給PWM控制器中的誤差放大器完成轉速反饋,內置固定衰減周期的整流電路,電流門限比較器反轉后會將輸出的上橋臂關斷,電流衰減一個固定的時間周期,根據三相無刷電機被控制可能的轉速變化范圍和扭距變化范圍,外部調節PID參數,來完成在給定轉速設置時穩定轉速目標。
同時具有使能控制、方向控制、霍爾信號脈沖整形、電源接反保護、輸入/輸出浪涌保護的功能。封裝采用DZS2826外殼(28*26*7mm)。HJ4314三相電機驅動電路模塊適用于40V以下的伺服系統。

主要特點
1) 全硬件結構,避免了用DSP+CPLD模式實現時,上電建立時間長的缺點;
2)模擬PID環路沒有了DSP數字PID環路的量化噪聲,超調量更容易設置;
3)內置高精度基準,有利于外部進行模擬高穩定轉速設定;
4)依靠三相無刷電機的三相霍爾信號就能給定完成轉速反饋,無需外加轉速測量裝置;
5)老煉篩選依據GJB548條件進行;
6)低功率及多重保護有利于提高器件的使用壽命/可靠性;
7)方向(DIR)、剎車(BRAKE)與主回路可以不公地。
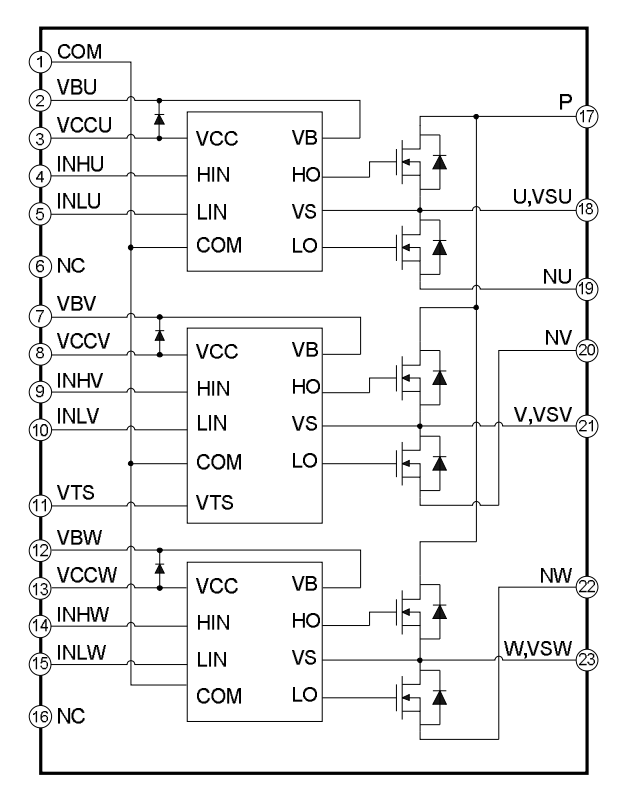
二
電原理圖
三
封裝形式及引出端
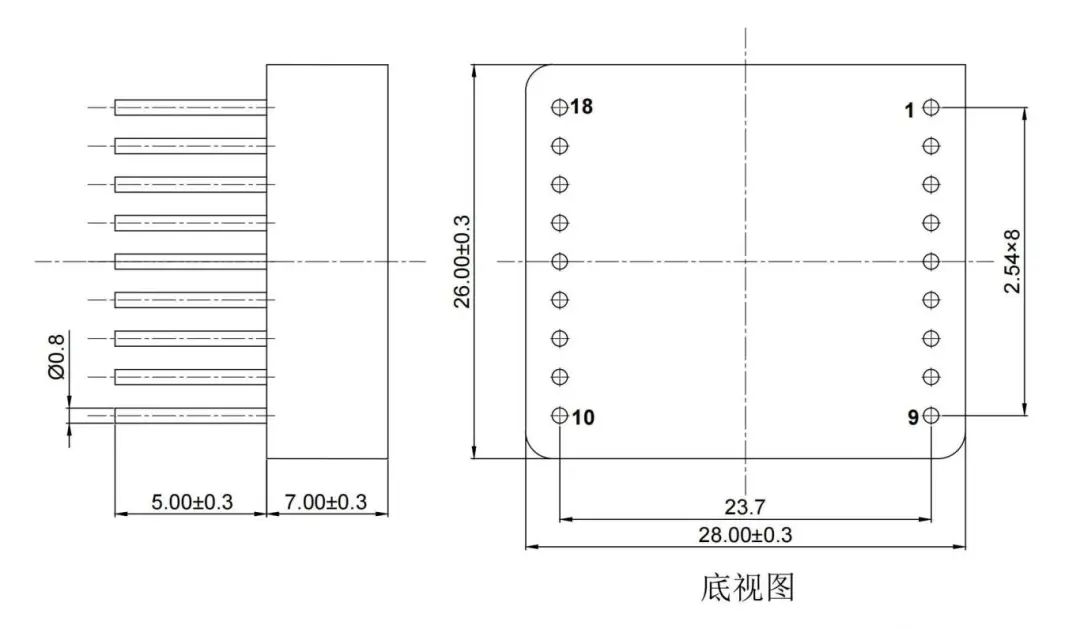
3.1 外形尺寸
采用DZS2826塑料外殼,封裝尺寸如下所示。
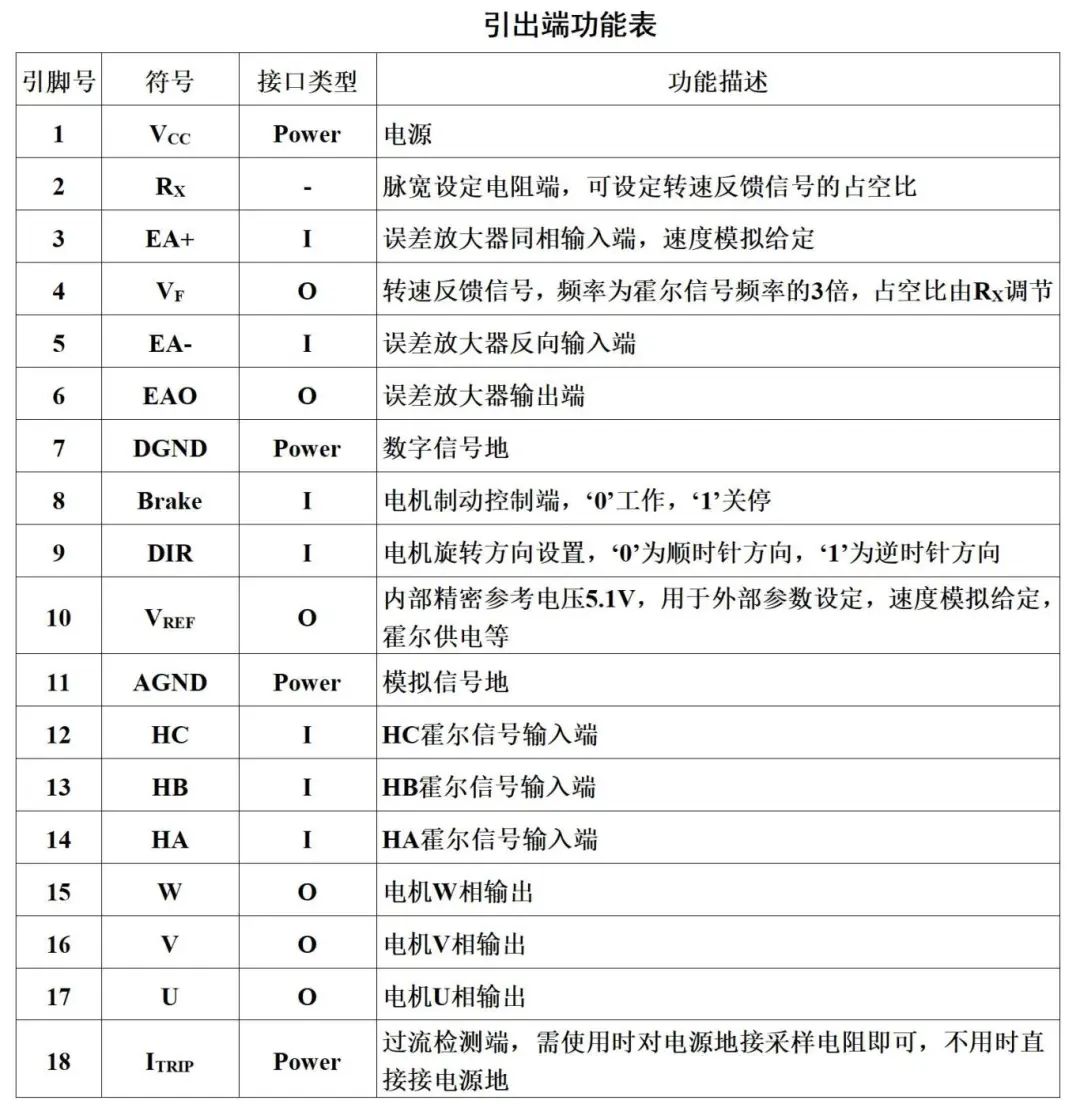
3.2 引出端功能
四
絕對額定最大值
電源電壓VCC :+15V~+38V
電源接反 :不限制
工作溫度:-55~+105℃
貯存溫度:-55~+105℃
引線耐焊接溫度(10s):+300℃
五
電特性
除非另有規定外,VCC=28V,-55℃≤TA≤+105℃。
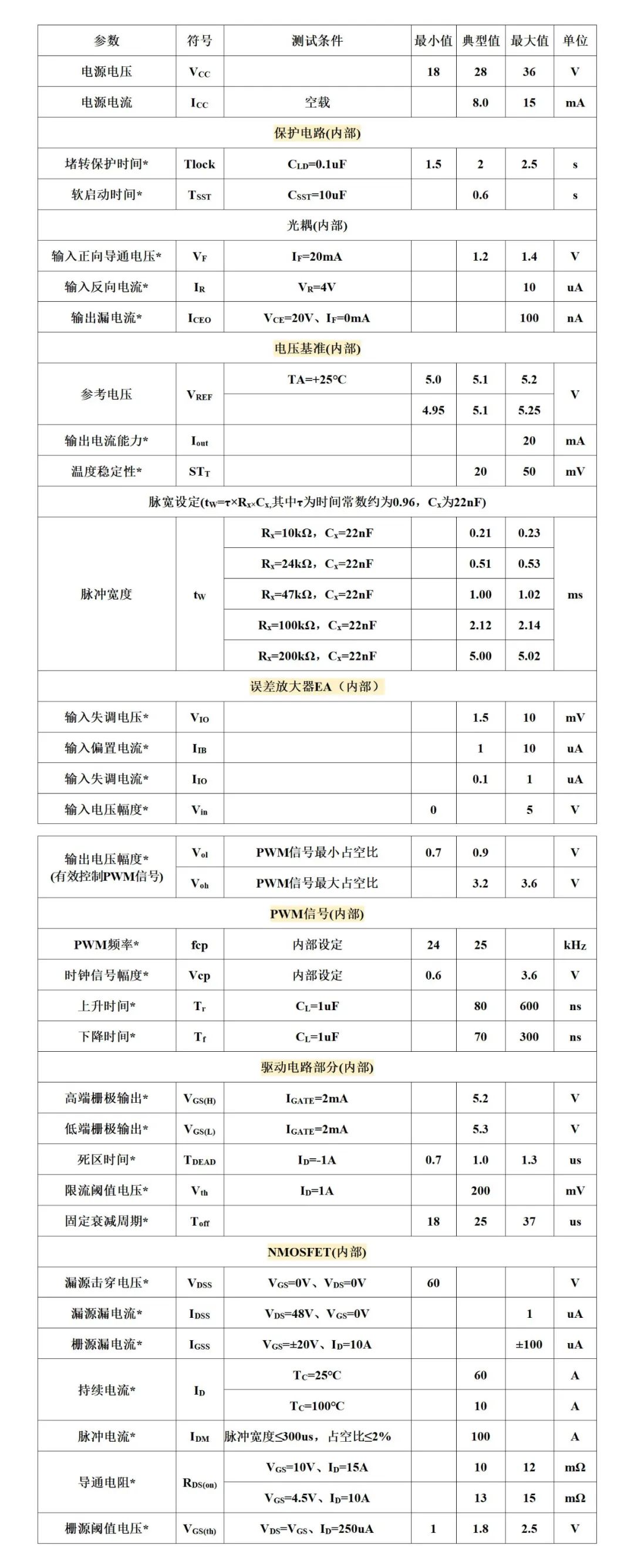
注)*表示設計保證
六
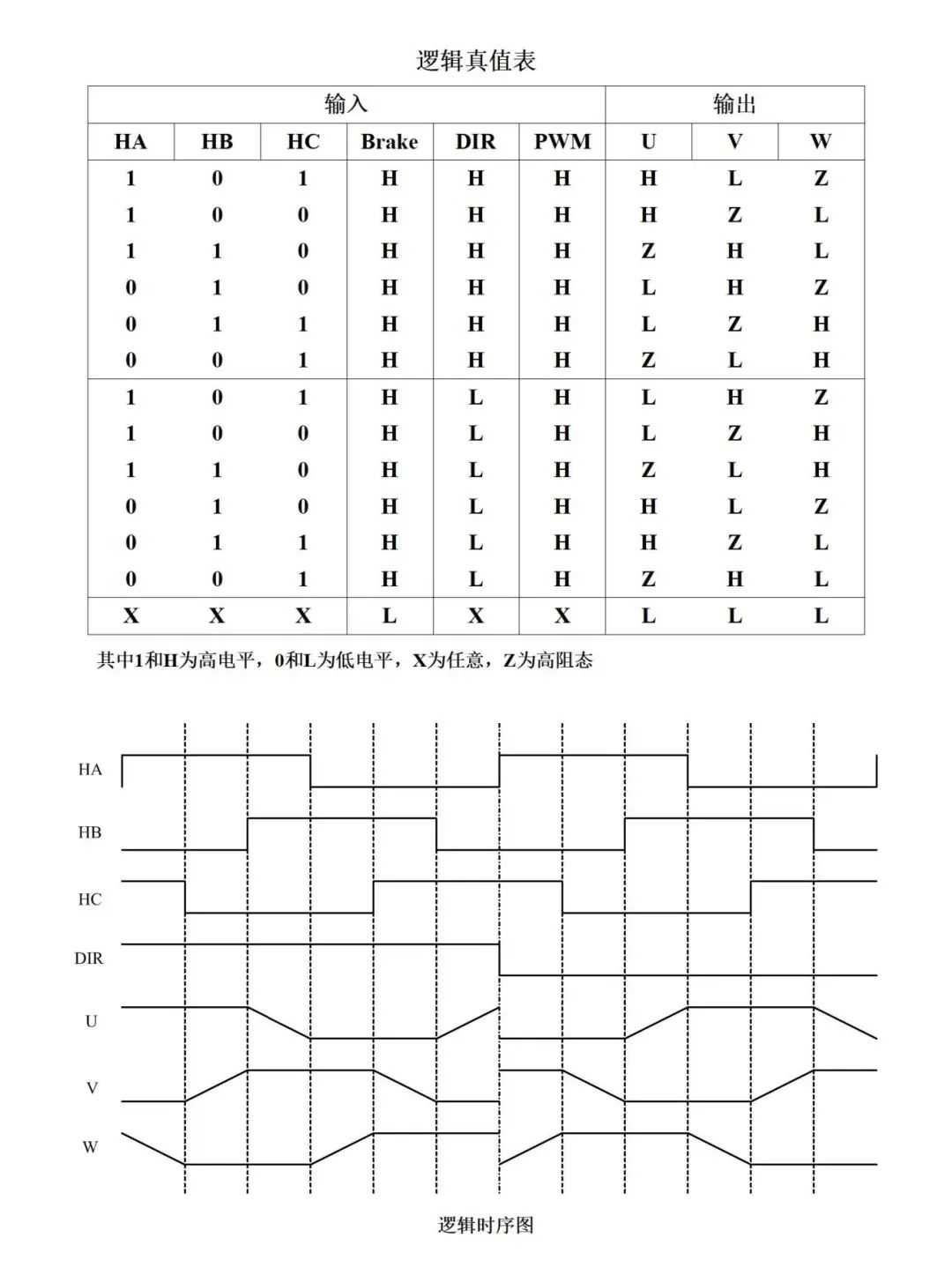
邏輯時序圖及真值表
七
典型應用及注意事項
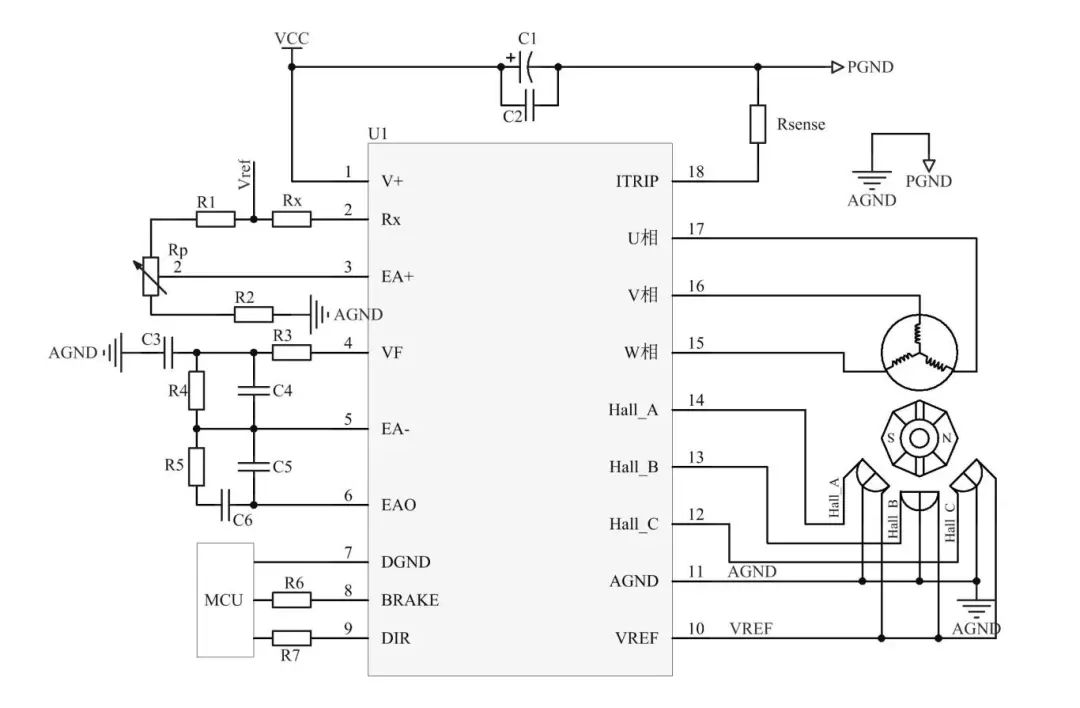
圖4典型應用
7.1轉速反饋信號脈沖寬度
如果期望最大電機速度為3000RPM,并且所使用的電機轉子上的永磁體具有一對磁極,則電機每次機械旋轉一周將會使每個霍爾效應傳感器傳遞一個脈沖周期,三個傳感器將產生三個獨立的脈沖周期,同時轉速反饋信號VF端將產生一個脈沖周期數為3的脈沖信號,每個脈沖分別對應傳感器脈沖的上升沿和下降沿。電機每秒轉速50轉,轉速反饋信號將每秒產生150脈沖或具有150赫茲的頻率(轉速反饋信號頻率為霍爾信號頻率的3倍)。因此,轉速反饋信號脈沖周期為6.66毫秒,轉速反饋信號脈沖寬度可設定為反饋信號脈沖周期的70%~80%,計算公式如下:
τ=0.96×Rx×Cx
注:0.96為單穩態震蕩電路的時間常數。Rx為轉速反饋信號脈寬設定電阻,Cx為轉速反饋信號脈寬設定電容值為22nF。
系統應用時,在轉速固定的情況下,Rx和Cx使用同樣的參數匹配不同的三相電機驅動電路模塊模塊,所設定的脈沖寬度因雙穩態多諧振蕩器而存在細微的差異,因此需對Rx和Cx進行微調,使其設定的脈沖寬度為定值,可有效避免雙穩態多諧振蕩器帶來誤差。
7.2 轉速給定及PID補償網絡
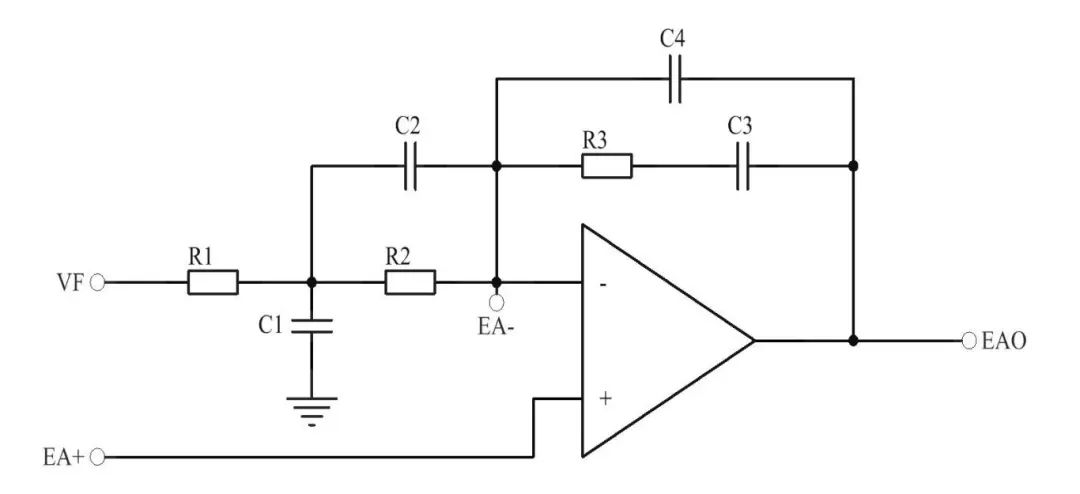
圖5 轉速給定及PID補償網絡
R1、C1的取值主要取決于轉速反饋信號VF的最低頻率,即三相無刷電機最低的轉速;
R2、R3、C2、C3、C4共同構成PID補償網絡,通過調節PID補償網絡使電機在給定條件下,適應扭矩變化要求;可根據具體使用工況自行設計PID拓撲結構,以達到對三相無刷電機更好的控制效果。
EA+轉速給定即可模擬給定也可以通過DSP的DAC直接給定。
7.3 電流整流
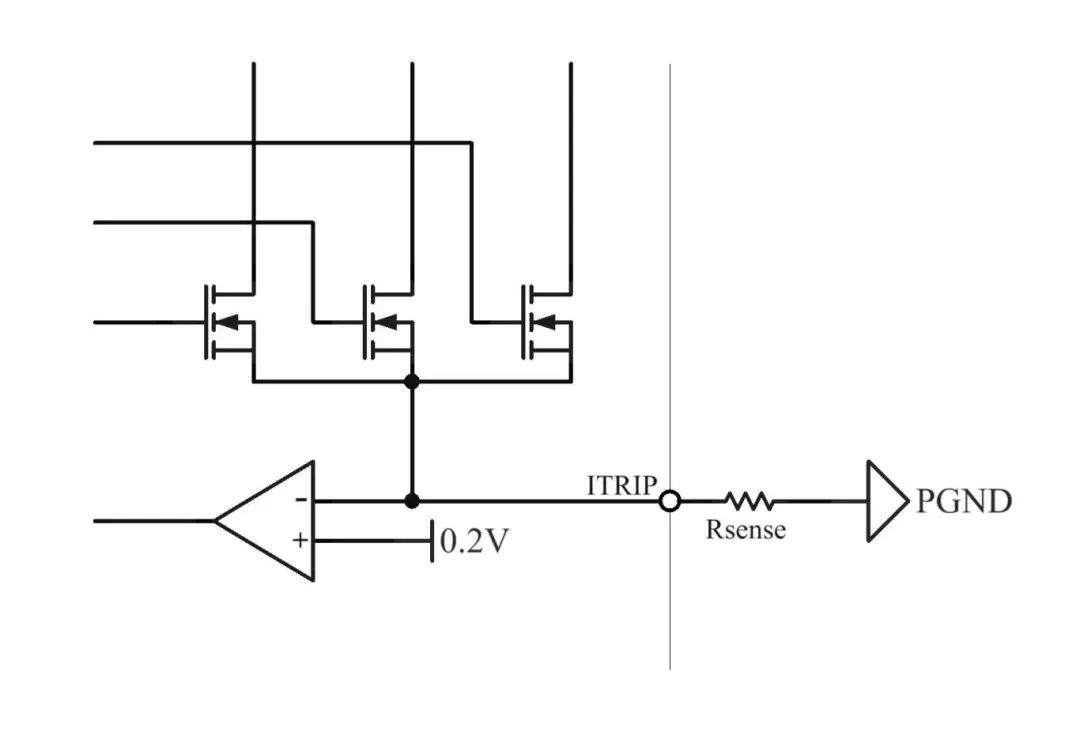
圖6 電流整流
芯片內置固定衰減周期的整流電路,當輸出開啟時,電流上升直到整流點Itrip:
Itrip=200mV/Rsense
此時電流比較器反轉,輸出的上臂橋關斷,電流衰減一個固定的時間周期;
7.4 電平兼容設計
方向控制、剎車控制可利用模塊內部的光耦進行隔離,利用上位機來控制方向和剎車,如下圖所示:
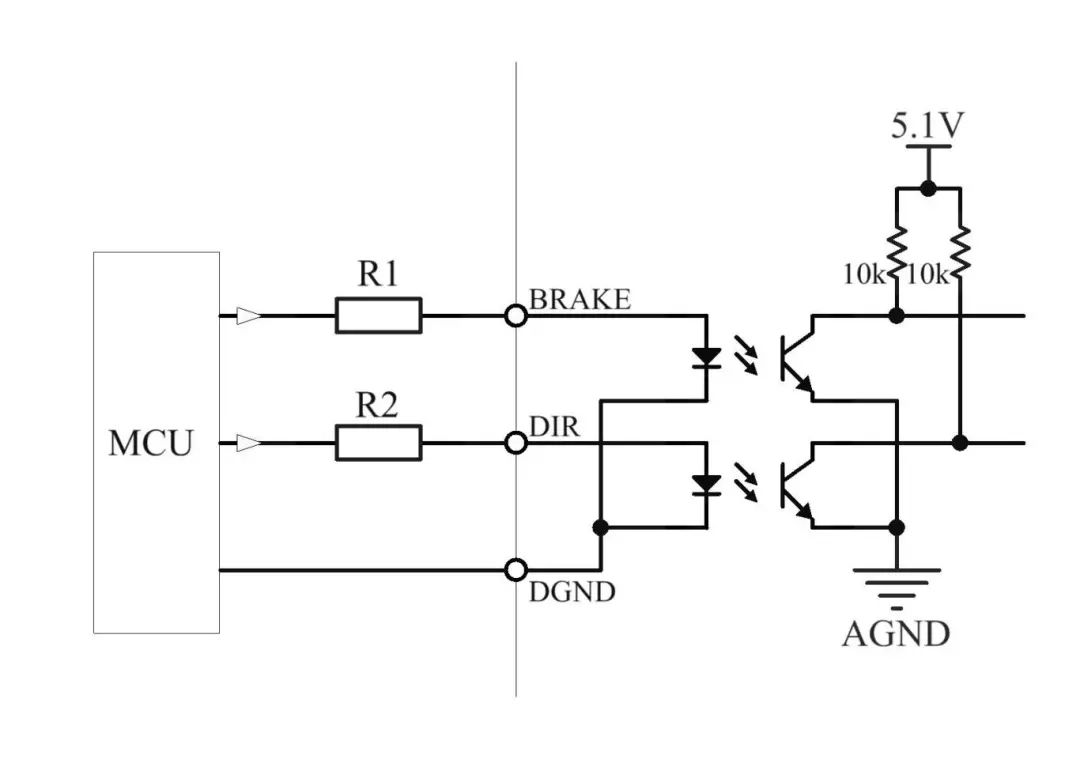
圖7 方向控制、剎車控制
其中,R1、R2的取值要求IR≥8mA.
7.5 剎車模式
當BRAKE為低時進入剎車模式,為高時驅動正常工作。剎車模式下三個半橋的全部下臂橋MOS都會打開,用以短路電機產生的反向電動勢。BRAKE會屏蔽PWM信號輸入功能與自動堵轉保護功能。
需要重點指出的是,當剎車態時,由于電流不流經Rsense電阻,內部的PWM電流限制此時不起作用,此時的最大電流等于反向電動勢除以負載電阻。
7.6注意事項
1)在使用DIR進行正反轉切換時屬于無延時硬換向、以及高速剎車會有很大的沖擊,所以不建議在高電壓全速運行時操作此兩項功能,強行操作有可能損壞功率管和芯片。
2)三相電機驅動電路模塊功率較小(最大100W內)過載能力弱,使用時留有余量,不可直接大功率電機工作或試機,強行工作有沖擊損壞功率管的風險,建議使用在28V/56W以內,如需超過56W功率,建議在U、V、W三相驅動輸出端和電機之間串入10~33uH的大功率電感,用來扼制對功率管造成的沖擊。
3)三相電機驅動電路模塊功用于霍爾電角度為120的直流無刷三相有霍爾的電機,電機需有霍爾且接對線序系統才能正常工作。
4) 帶載啟動波形
圖8所示波形為24V供電,0.5A的負載下帶載啟動的電源電壓和電流波形:
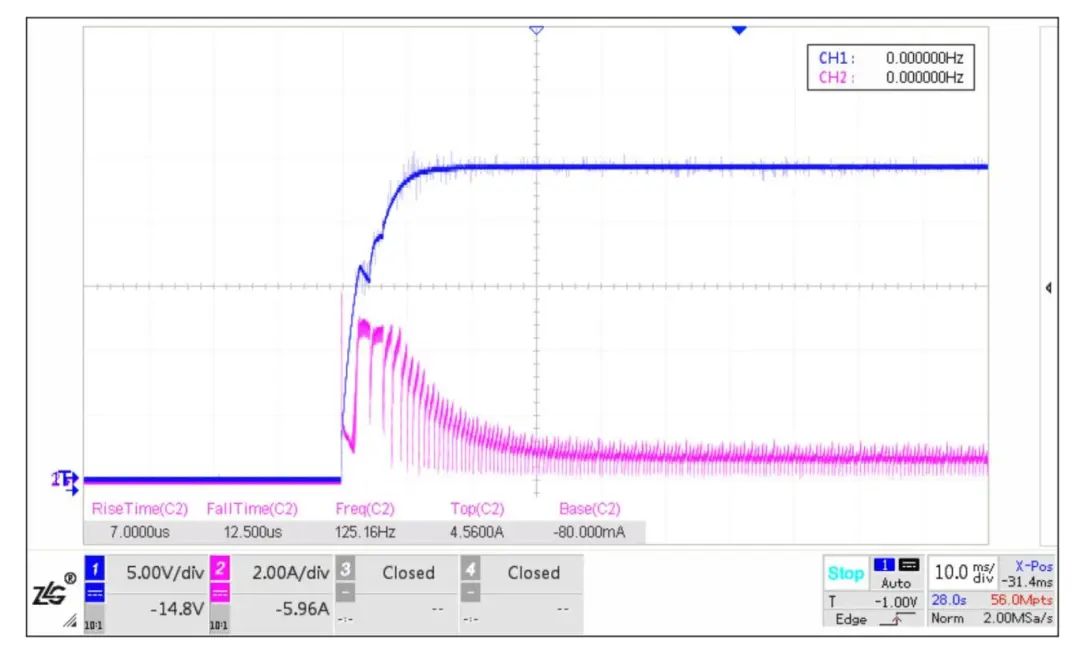
圖8 帶載啟動波形
(藍色為系統電源電壓,紫色為系統電源電流)
系統內部自帶軟啟動電路,由圖8可知,從上電到建立大約需要13ms,在此期間,系統的過沖電流從最大開始逐周期進行遞減,到最后趨于穩定值。
5) 電機高速運轉時切換方向瞬間波形
圖9所示波形為24V供電,0.5A的負載下正常工作時使用DIR功能進行強換向的電源電壓和電流波形:
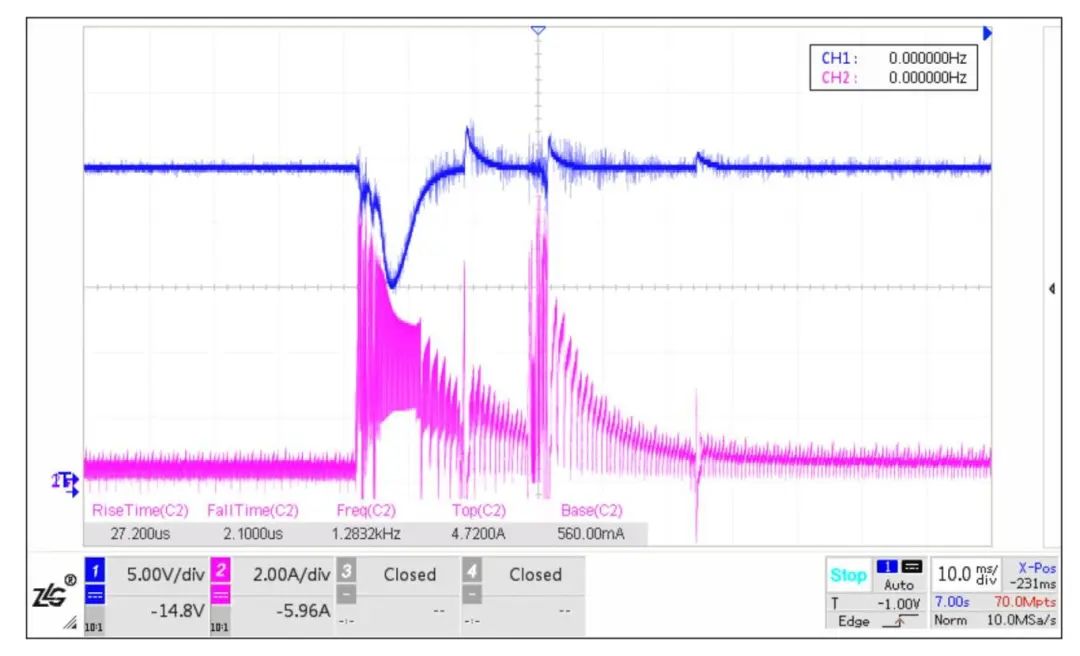
圖9電機高速運轉時切換方向瞬間波形
(藍色為系統電源電壓,紫色為系統電源電流)
電機在高速工作時使用DIR功能進行強換向,瞬間會對電源造成很大的沖擊,對系統電源的能力要求比較高;長此以往會大大降低該模塊的可靠性。嚴禁在正電源端串入續流二極管來使用DIR功能進行強換向,此舉在較高轉速下會瞬間燒毀模塊內部控制電路。
-
電機驅動
+關注
關注
60文章
1207瀏覽量
86627 -
PWM控制
+關注
關注
7文章
193瀏覽量
26265 -
電機驅動電路
+關注
關注
1文章
17瀏覽量
7019 -
三相無刷電機
+關注
關注
0文章
33瀏覽量
6315
原文標題:HJ4314三相電機驅動電路模塊
文章出處:【微信號:hangjingic,微信公眾號:航晶微電子】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
適用于三相電機驅動的智能功率模塊設計實用指南

三相正弦波無刷電機驅動方案分享
三相全橋智能功率模塊IPM-CS5755MT(三相無刷直流電機驅動電路5A/500V)
步進電機的驅動與控制 三相步進電機的驅動電路






 工商網監
工商網監
評論