 ROHM開始開發一種新的機器人移動技術“NoMaDbot”
ROHM開始開發一種新的機器人移動技術“NoMaDbot”
在制造和物流行業,AGV(自動搬運機器人)和 AMR(自主移動機器人)的應用越來越廣泛。由于勞動力短缺問題而引發擔憂的同時,能夠在工廠和倉庫與人協同作業的AGV和AMR正在逐漸成為行業新寵。
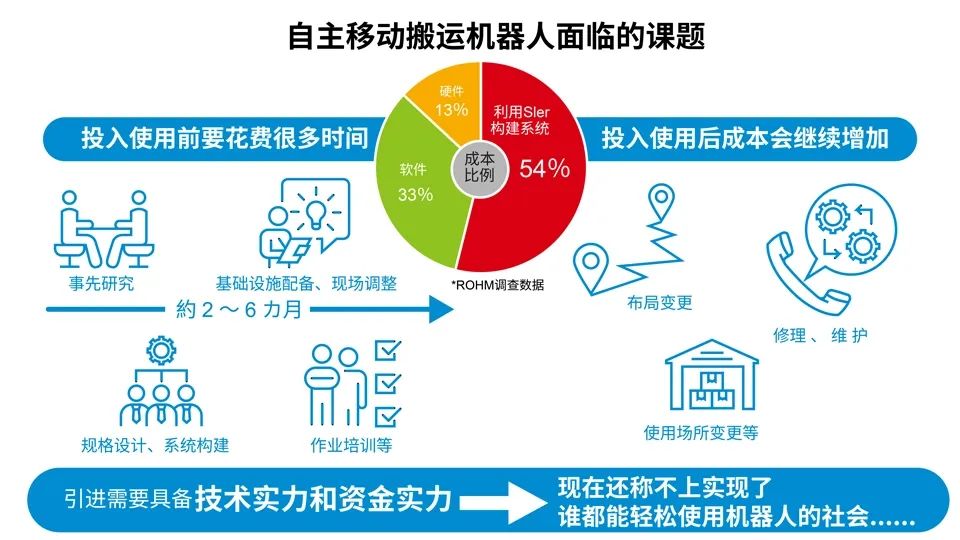
然而,AGV需要將磁條或二維碼等導航裝置貼在地面上來鋪設行進路線。另外,AMR在購買之后也不能立即投入使用。在投入實際使用之前,需要規劃行進路線和創建地圖,需要耗費大量的時間和成本才能實際運行系統,風險非常大。
此外,再考慮到發生故障時的緊急響應和維護,實施的門檻非常高,這是不爭的事實。鑒于這些原因,可能很多人認為讓AGV或AMR做的工作內容不值得花費那么大的引進成本。
對此,ROHM正在秘密開發一種新的搬運機器人移動技術,針對那些不足以由AGV和AMR來完成的任務,利用該技術將能夠以很低的成本立即投入使用。這是使未來社會更加便捷的、基于全新理念開發的機器人解決方案。在本文中,將向大家稍微劇透一下NoMaDbot(無地圖移動機器人)這一新型移動技術的秘密。
1
AGV和AMR的普及所暴露出來的現場問題
在智能化轉型的工業設施、工廠和物流等工作現場,AGV和AMR等搬運機器人的身影越來越多,并且其應用范圍也越來越廣。然而,隨著它們的普及,各種問題也隨之暴露出來。
尤其是AMR,由于其性能高,也能為改善工作環境做出巨大貢獻,因而如今仍然備受關注。另一方面,鑒于“引進成本高”、“需要專業的SIer(系統集成商,構建系統的工程師)”、“到實際投入使用需要很長的時間”以及“頻繁卡頓”等原因,似乎很多人在猶豫是否引進。
事實上,工作現場有很多簡單的任務并不需要高性能的機器人。
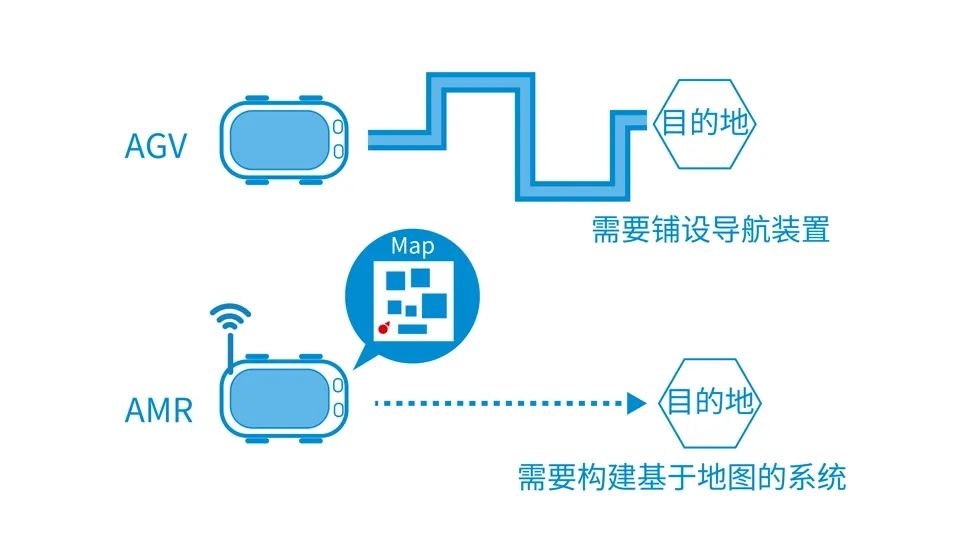
例如,針對“將某物從A處運到B處”的需求,如果使用傳統的AGV,就需要鋪設磁條等導航裝置。如果使用AMR,情況則更為復雜。AMR使用的是一種稱為SLAM(Simultaneous Localization and Mapping)的技術,可以在檢測自我位置的同時創建地圖。
要想引入SLAM,需要由稱為“SIer”的專業工程師設計出適合設備的規格并規劃行進路線,而且只有在創建了地圖之后才能實際投入使用。因此,購買后可能需要耗費幾個月的時間才能真正實際運行。另外,如果設備的布局發生了變化,這些流程可能需要重新再來一遍。
在路線復雜、對精密性和速度要求很高的設備、以及布局在很長時間內不會改變的環境中,使用像AMR這樣的高性能搬運機器人可以發揮非常大的作用,但是在諸如“希望將不用的東西或缺陷產品運到廢棄物堆場”或“希望將某物從A交給B”這樣的簡單任務,并不需要太高級的性能和協作功能。
在物流倉庫、超市內部和活動會場這類“布局會頻繁變化”的環境中,花費很長時間構建基于地圖的系統,可能會導致對搬運機器人的采用猶豫不決。
“只要能搬運”就行,難道就沒有更簡單、性價比更高的搬運機器人嗎?
為了滿足客戶的這種需求,ROHM開始開發一種新的機器人移動技術“NoMaDbot”。
2
生物無需地圖即可到達目的地!
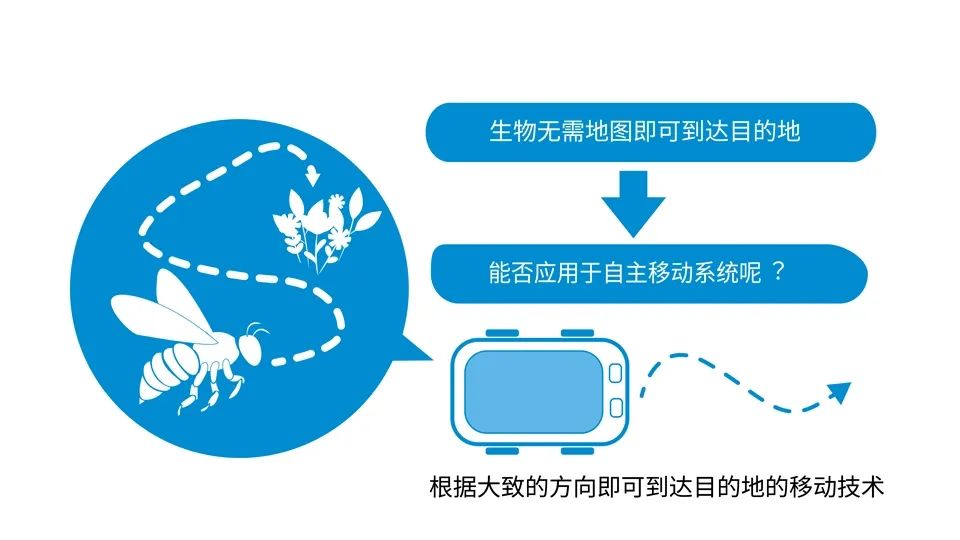
“NoMaDbot”的開發始于“生物無需地圖即可到達目的地”的逆轉思維。
例如,昆蟲和動物是根據大致的方向、大致的距離以及對當時情況的判斷來尋找目的地的。人類也一樣。雖然去很遠的地方時有時會依賴地圖或導航,但大多數人去家附近的超市購物時應該不會隨身攜帶地圖或開導航的。
即使是沒去過的超市,只要知道大概的方向和距離,應該就能到達那里。另外,即使道路因施工封閉,或者有停放的汽車等障礙物,也可以避讓或繞行,會根據當時的情況靈活應對,而不會半途停下。
那么是否有可能給搬運機器人配備類似于這種生物的、能夠隨機應變的自主移動技術呢?
對此,“NoMaDbot”開發團隊重點關注的是如何推測目的地的大致方向,以及如何在去往目的地的途中檢測到并避讓障礙物。
3
NoMaDbot的核心技術① “方位推測”
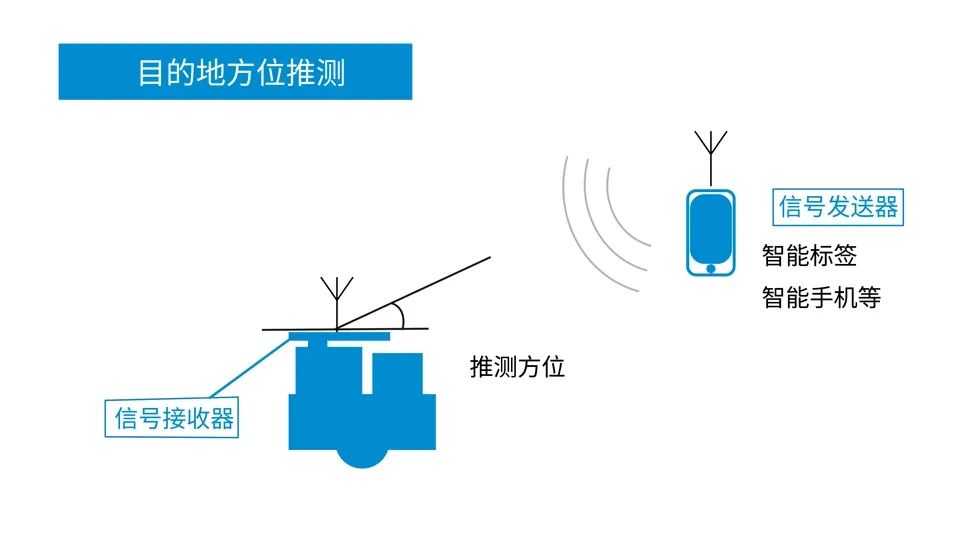
NoMaDbot的名稱源自“No Map Driving robot”。即“不使用地圖的自主移動技術”。其核心技術之一是用來確定目的地方向的“方位推測”技術。
對于NoMaDbot而言,充當信息發送器的智能標簽(未來可能是智能手機等)就是目的地。NoMaDbot需要檢測出從信息發送器發出的無線電波并推測其方位。雖然只能向目的地——智能標簽行進,但這對于簡單的搬運用途來說已經足夠了。
另外,雖然無法像AMR那樣對復雜的路線進行編程,但通過將多個智能標簽組合起來并按順序切換,也可以執行“將貨物從A處運送到B處,然后去往C處”等工作。
4
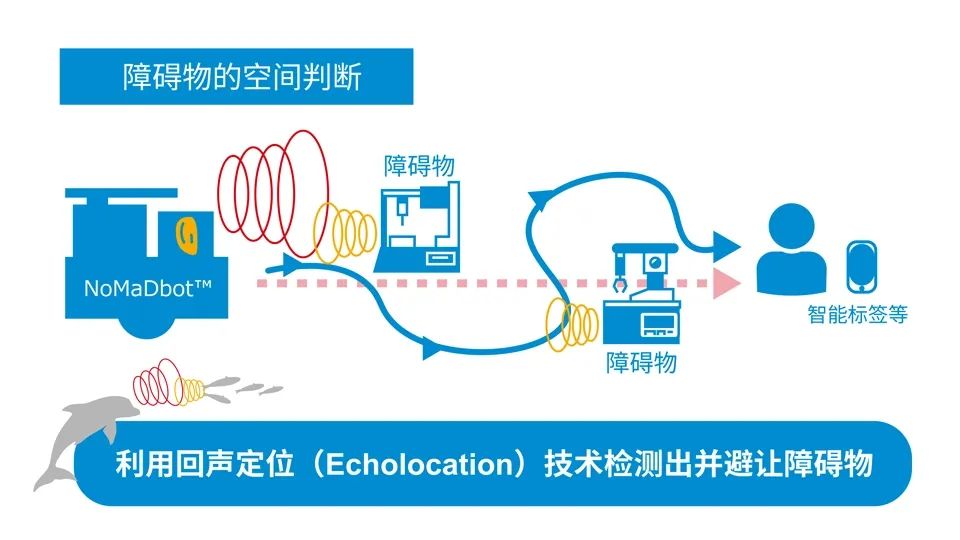
NoMaDbot的核心技術② “回聲定位”
另一項核心技術是用來避讓沿途障礙物的“回聲定位(Echolocation)”技術。
回聲定位是利用發射出去的超聲波和反射回來的回聲來檢測和確定物體的距離、方向、大小等的技術。這是受到海豚、鯨魚和蝙蝠等的空間判斷能力啟發而開發出來的技術。通過在移動算法中使用回聲定位技術,NoMaDbot可以檢測出并避讓障礙物。
5
“方位推測”+“回聲定位”=“無需地圖”
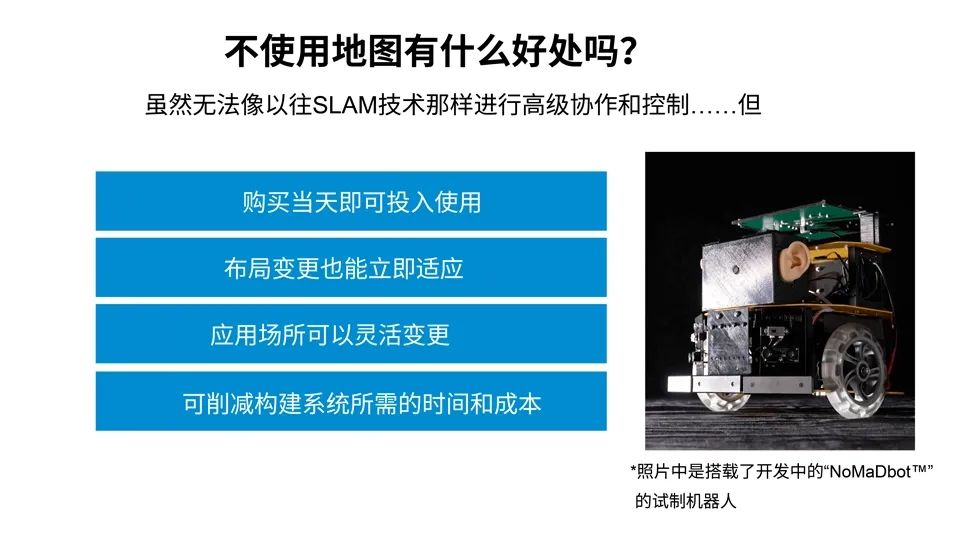
通過融合“方位推測”和“回聲定位”這兩項核心技術,實現了“不使用地圖的自主移動技術”的,是來自日本的全球首創全新機器人自主移動技術“NoMaDbot”。
雖然不可能像使用傳統技術“SLAM”的AMR那樣進行高級協作和控制,但足以完成“運送貨物”這類的任務,而且其應用場景應該非常多。更重要的是,采用了這種新的移動技術之后,將不再需要由SIer構建基于地圖的系統,從購買之日起就可以立即投入使用。當然,也不會受到設備布局變更或工作場所變更的影響。
*截至2023年12月 ROHM調查數據
6
“無地圖”機器人移動技術的更多優勢
“不需要地圖”所帶來的好處不僅僅是降低成本和投入使用的速度。由于無需使用地圖,所以也不會因為跟丟地圖上的位置而卡頓。也就是說,這是一種抗意外風險能力超強的自主移動系統。
另外,NoMaDbot的移動算法并不是針對地圖上的固定地點,而是針對智能標簽等信息發送器,因此即使在行進途中目的地發生移動,只要在無線電波能夠到達的范圍內,就能夠準確到達目的地。
除此之外,還可以執行僅使用基于以往SLAM的移動技術難以完成的任務,例如“實時尾隨不斷改變位置的A先生并將貨物送達”或“跟隨A先生搬運貨物”。
7
ROHM開始開發自主移動技術的原因
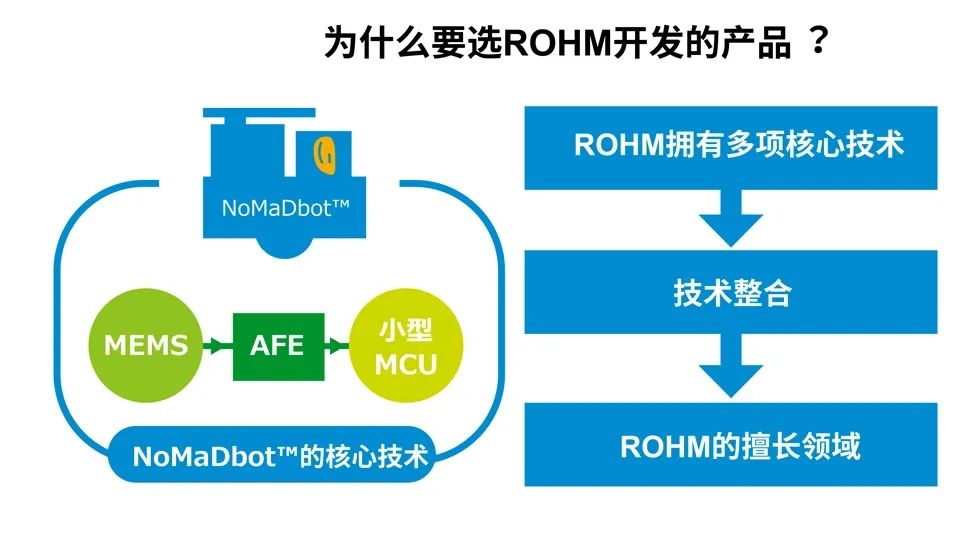
那么,半導體制造商ROHM為什么要開始開發自主移動技術呢?這是因為ROHM致力于“實現誰都能使用自主移動機器人的社會”的目標。
更重要的原因是,ROHM除了全球首創的自主移動技術“NoMaDbot”之外,還擁有其核心技術中的核心——MEMS、AFE、小型MCU等多項關鍵技術,通過整合這些技術,可以創造出新的解決方案,這正是ROHM的優勢領域。
8
NoMaDbot的應用領域
NoMaDbot不否定AGV和AMR,也不與它們競爭。
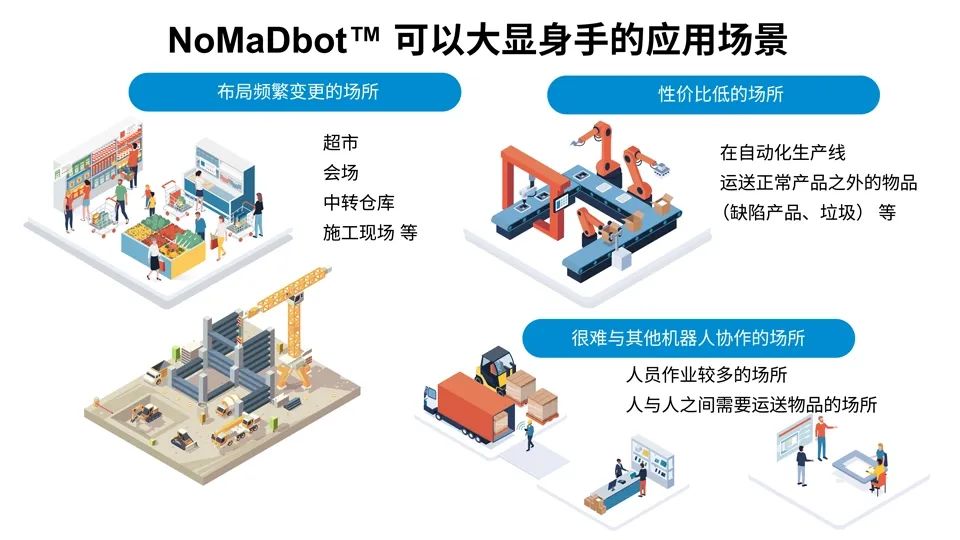
對于希望確定行進路線的應用,可以使用AGV;對于希望完全自動化的應用,可以使用AMR;對于希望便宜且簡單地實現自動化的應用,可以使用NoMaDbot。這三種產品可以分棲共存。
例如,NoMaDbot適用于布局會根據時間或季節而頻繁變化的中轉倉庫等場所、超市、活動會場和施工現場等需要人與人之間運送物品的場所;工廠等正常產品之外的缺陷產品和垃圾等的運送作業。如果只是運送貨物,NoMaDbot比AGV或AMR更簡單易用,在便捷性方面的優勢非常大。這就是NoMaDbot。
另外,隨著未來的進一步開發,預計NoMaDbot將能在更廣泛的應用和環境中更加便利地使用,比如尾隨智能標簽攜帶者的跟隨行進模式、以及將智能手機與應用程序聯動等應用。

9
NoMaDbot對未來工業社會的展望
NoMaDbot旨在創造“誰都能使用自主移動機器人的社會”。
在不需要高性能機器人的應用場景中,使用更簡單、成本更低、更易用的搬運機器人,可以提高生產效率,有助于促進制造和物流的自動化。
另外,通過與傳感器融合概念相結合,NoMaDbot還具有更大的發展潛力。目前僅針對陸地應用,未來ROHM還會開發出能夠在天空、海洋等特殊環境下工作的產品,讓我們拭目以待。
-
機器人
+關注
關注
210文章
28231瀏覽量
206614 -
AMR
+關注
關注
3文章
423瀏覽量
30188 -
AGV
+關注
關注
27文章
1284瀏覽量
41016 -
羅姆半導體
+關注
關注
0文章
58瀏覽量
14567
原文標題:干貨 | NoMaDbot?就像有生命一樣?ROHM挑戰“不需要地圖”的機器人移動新技術
文章出處:【微信號:羅姆半導體集團,微信公眾號:羅姆半導體集團】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
醫療機器人的優缺點_醫療機器人涉及哪些技術
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
碼垛機器人的組成和工作原理
abb工業機器人的編程語言是什么
全球機器人開發領域采用NVIDIA 機器人開發和生產
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
海康機器人第100000臺移動機器人下線
其利天下技術·搭載無刷電機的掃地機器人的前景如何?
小型移動搬運機器人可以幫助物流行業完成哪些作業呢?

富唯智能機器人集成了協作機器人、移動機器人和視覺引導技術
LabVIEW的六軸工業機器人運動控制系統
工業機器人產業發展及應用現狀






 工商網監
工商網監
評論