") RDC SC2121、SC2161有效提升新能源汽車加速穩(wěn)定性
RDC SC2121、SC2161有效提升新能源汽車加速穩(wěn)定性
新能源汽車相較于傳統(tǒng)汽車擁有更大的加速度,但是過(guò)快加速對(duì)于乘客的體驗(yàn)往往并不友好,需要對(duì)旋變電機(jī)的控制系統(tǒng)進(jìn)行優(yōu)化。如何更好地控制旋變電機(jī),就需要清楚了解電機(jī)的狀態(tài),其中包括旋轉(zhuǎn)的角度和速度。
旋變解碼可以分為軟解碼和硬解碼,軟解碼通常由MCU完成,硬解碼由旋變解碼芯片完成。如果采用軟解碼的方案,則需要MCU根據(jù)旋變電機(jī)輸出的正余弦信號(hào)進(jìn)行包絡(luò)提取等計(jì)算從而得出轉(zhuǎn)子的角度信息,但是這種方案就會(huì)出現(xiàn)占用MCU過(guò)多資源并且輸出角度精度較差等問(wèn)題。采用專用芯片來(lái)進(jìn)行正余弦解碼被稱為硬解碼,該類芯片被稱為旋變數(shù)字轉(zhuǎn)換器(RDC)。
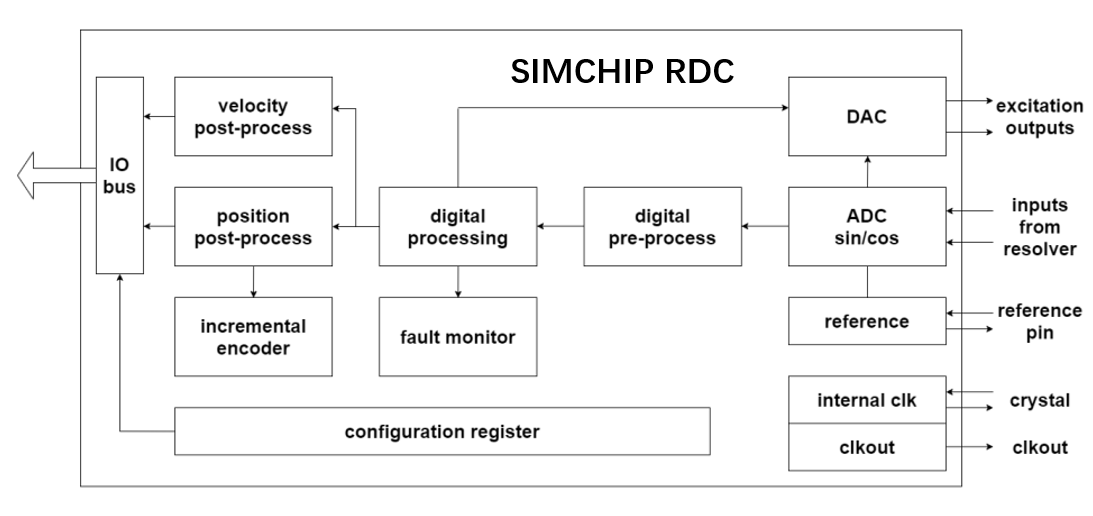
國(guó)芯思辰SC2121、SC2161芯片是10位至16位分辨率旋變數(shù)字轉(zhuǎn)換器,集成片上可編程正弦波振蕩器,為旋變器提供正弦波激勵(lì)。轉(zhuǎn)換器的正弦和余弦輸入端允許輸入3.15Vp-p±27%。Type II伺服環(huán)路用于跟蹤輸入信號(hào),并將正弦和余弦輸入端的信息轉(zhuǎn)換為輸入角度和速度所對(duì)應(yīng)的數(shù)字量。最大跟蹤速3125rps。產(chǎn)品特色介紹:
1、比率跟蹤轉(zhuǎn)換Type II跟蹤環(huán)路能夠連續(xù)輸出位置數(shù)據(jù),且沒(méi)有轉(zhuǎn)換延遲。它還可以抑制噪聲,并提供參考和輸入信號(hào)的諧波失真容限。
2、系統(tǒng)故障檢測(cè)。故障檢測(cè)電路可以檢測(cè)旋變的信號(hào)丟失、超范圍輸入信號(hào)、輸入信號(hào)失配或位置跟蹤丟失。各故障檢測(cè)閾值可以由用戶單獨(dú)編程,以便針對(duì)特定應(yīng)用進(jìn)行優(yōu)化。
3、輸入信號(hào)范圍。正弦和余弦輸入端支持3.15Vp-p ±27%的差分輸入電壓。
4、可編程激勵(lì)頻率。可以輕松地將激勵(lì)頻率設(shè)置為2kHz至20kHz范圍內(nèi)的多個(gè)標(biāo)準(zhǔn)頻率。
5、增量式編碼器仿真采用標(biāo)準(zhǔn)A-quad-B格式,并提供方向輸出。
注:如涉及作品版權(quán)問(wèn)題,請(qǐng)聯(lián)系刪除。
-
新能源汽車
+關(guān)注
關(guān)注
141文章
10427瀏覽量
99282 -
RDC
+關(guān)注
關(guān)注
0文章
23瀏覽量
9105 -
國(guó)芯思辰
+關(guān)注
關(guān)注
0文章
1008瀏覽量
1311
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
NTC溫度傳感器:護(hù)航新能源汽車電池安全運(yùn)行
脫毛儀感應(yīng)IC推薦 SC01,SC02A,SC02B
解決方案丨EasyGo新能源系統(tǒng)實(shí)時(shí)仿真應(yīng)用
RDC芯片SC2161(兼容AD2S1210)用于車輛電機(jī)角度控制

SC2161(AD2S1210)廣泛用于伺服系統(tǒng)、機(jī)器人、汽車轉(zhuǎn)向
VCO的頻率穩(wěn)定性是什么
解決方案丨PPEC車載DCDC轉(zhuǎn)換器:新能源汽車的高效能源動(dòng)力系統(tǒng)
影響放大器穩(wěn)定性的因素
【換道賽車:新能源汽車的中國(guó)道路 | 閱讀體驗(yàn)】 新能源到底新在何處?新能源在國(guó)內(nèi)如何發(fā)展?
【換道賽車:新能源汽車的中國(guó)道路 | 閱讀體驗(yàn)】 A 序
新能源汽車性能提升的催化劑:碳化硅技術(shù)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論