") 無監(jiān)督深度學(xué)習(xí)實(shí)現(xiàn)單次非相干全息3D成像
無監(jiān)督深度學(xué)習(xí)實(shí)現(xiàn)單次非相干全息3D成像
論文信息
背景引入
數(shù)字全息術(shù)因其能夠從單一視點(diǎn)對3D場景進(jìn)行成像而備受關(guān)注。與直接成像相比,數(shù)字全息是一種間接的多步驟成像過程,包括光學(xué)記錄全息圖和數(shù)值計(jì)算重建,為包括深度學(xué)習(xí)在內(nèi)的計(jì)算成像方法提供了廣泛的應(yīng)用場景。近年來,非相干數(shù)字全息術(shù)因其成像分辨率高,無散斑噪聲和邊緣效應(yīng),低成本等優(yōu)點(diǎn)而備受關(guān)注。目前,非相干全息術(shù)已被應(yīng)用于孔徑成像、超分辨成像、大景深成像和晶格光片顯微成像。
近年來,深度學(xué)習(xí)已被應(yīng)用于非相干數(shù)字全息術(shù)。然而,目前所有的報(bào)告都是基于數(shù)據(jù)驅(qū)動(dòng)的監(jiān)督學(xué)習(xí)方法,這些方法需要大量的配對標(biāo)記數(shù)據(jù),并且存在泛化不足等問題。為了解決上述挑戰(zhàn),本文提出了一種無訓(xùn)練神經(jīng)網(wǎng)絡(luò)先驗(yàn)的單次非相干全息自校準(zhǔn)3D重建方法,稱為SC-RUN。SC-RUN可以提高點(diǎn)擴(kuò)散函數(shù)(PSF)的保真度和信噪比,只需單個(gè)全息圖就可以實(shí)現(xiàn)3D對象的高保真度和無偽影重建。本文以無干涉編碼孔徑相關(guān)全息術(shù)(I-COACH)成像為例,清楚地展示了SC-RUN的效果。
方法原理
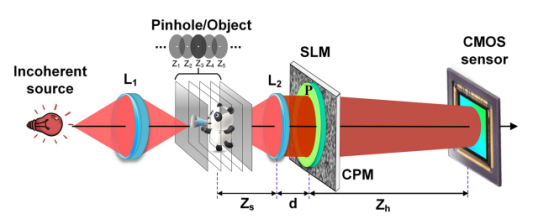
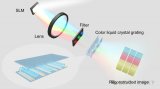
圖1 非干涉編碼孔徑關(guān)聯(lián)全息術(shù)裝置
非相干光源的光被透鏡L1聚焦以照射物體。物體位于透鏡L2的前焦平面Z3附近,使得物體可以被認(rèn)為位于CPM的遠(yuǎn)場中。加載了編碼相位的SLM位于透鏡L2距離d處,SLM前加偏振片P。由于I-COACH的成像模型在強(qiáng)度上是線性空間不變,因此傳感器記錄的物體全息圖可以被視為無數(shù)個(gè)物點(diǎn)全息圖的非相干強(qiáng)度疊加,因此,可以先對一個(gè)物點(diǎn)的光場進(jìn)行理論分析,然后通過卷積或疊加得到多物點(diǎn)物體的成像模型。
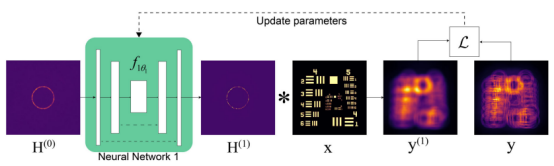
圖2 SC-RUN—校準(zhǔn)點(diǎn)擴(kuò)散函數(shù)結(jié)構(gòu)
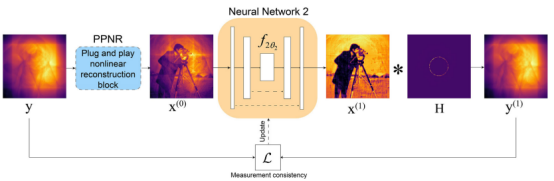
圖3 SC-RUN—基于無訓(xùn)練神經(jīng)網(wǎng)絡(luò)先驗(yàn)的單次成像結(jié)構(gòu)
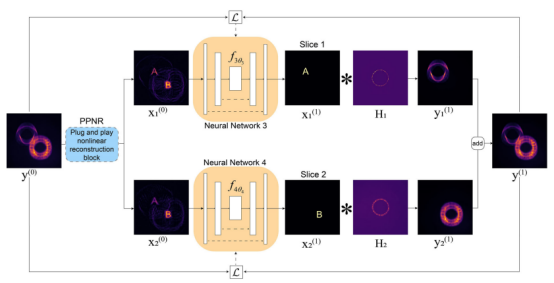
圖4 SC-RUN—基于無訓(xùn)練神經(jīng)網(wǎng)絡(luò)先驗(yàn)的單次3D成像結(jié)構(gòu)
系統(tǒng)光路
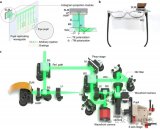
多通道I-COACH實(shí)驗(yàn)系統(tǒng)如圖5所示,其中振幅型空間光調(diào)制器的產(chǎn)品參數(shù)如下表所示。
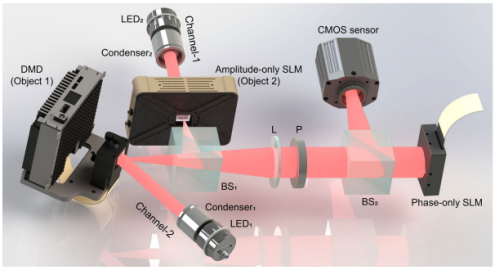
圖5 I-COACH實(shí)驗(yàn)裝置
本實(shí)驗(yàn)所采用的空間光調(diào)制器為我司的TSLM07U-A,其參數(shù)規(guī)格如下:
|
型號 |
TSLM07U-A |
調(diào)制類型 |
振幅型 |
|
液晶類型 |
透射式 | 灰度等級 |
8位,256階 |
|
像素?cái)?shù) |
1920×1080 |
像元大小 | 8.5μm |
|
有效區(qū)域 |
0.74" 16.3mm×9.18mm |
對比度 | 600:1 |
| 響應(yīng)時(shí)間 | 上升7ms,下降20ms |
開口率 |
57% |
|
刷新頻率 |
60Hz | 光學(xué)利用率 |
20%@633nm |
|
電源輸入 |
24V 1A&5V 1A |
光譜范圍 |
380nm-1200nm |
|
損傷閾值 |
2W/cm2 |
數(shù)據(jù)接口 |
DVI |
系統(tǒng)由不同軸向平面中的兩個(gè)目標(biāo)通道組成,其中數(shù)字微鏡器件(DMD)用作通道1中的目標(biāo)1,而振幅型空間光調(diào)制器用作通道2中的目標(biāo)2。來自空間非相干發(fā)光二極管(LED)的光通過聚光器收集以照射物體,然后兩個(gè)通道內(nèi)衍射的物體光通過分束棱鏡(BS1)組合并通過透鏡L進(jìn)行準(zhǔn)直。偏振片P使物光的偏振方向與純相位SLM的調(diào)制軸方向一致。最后,通過CMOS傳感器記錄由純相位SLM調(diào)制的光波。純相位SLM加載由GSA算法合成的全息圖。
實(shí)驗(yàn)結(jié)果
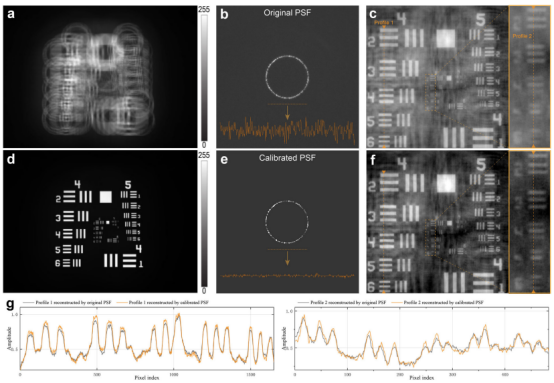
圖6 SC-RUN對PSF的校準(zhǔn)結(jié)果。a) 全息圖,b) 原始PSF,c) 使用原始PSF進(jìn)行非線性重建的結(jié)果,d) 已知對象,e) 校準(zhǔn)后的PSF,f) 使用校準(zhǔn)的PSF進(jìn)行非線性重建的結(jié)果。
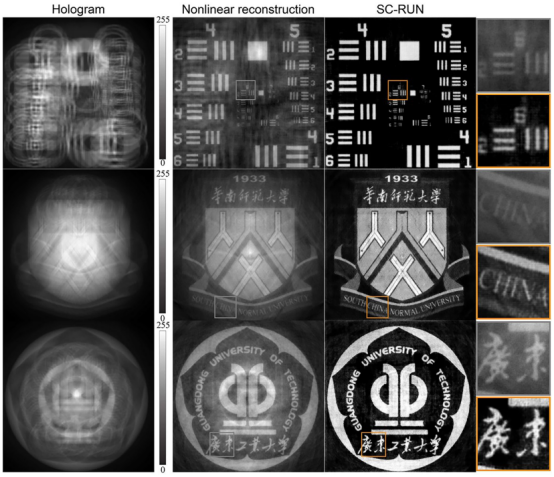
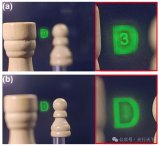
圖7 SC-RUN和非線性重建的2D實(shí)驗(yàn)結(jié)果
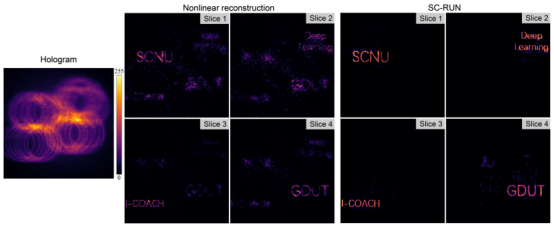
圖8 SC-RUN和非線性重建的3D實(shí)驗(yàn)結(jié)果
以上實(shí)驗(yàn)結(jié)果表明,SC-RUN在I-COACH上表現(xiàn)良好,從而說明預(yù)先校準(zhǔn)PSF,然后通過神經(jīng)網(wǎng)絡(luò)重建對象的這一策略具有很大的潛力。目前,許多光學(xué)成像技術(shù)都是通過設(shè)計(jì)專門的PSF來實(shí)現(xiàn)的。例如,通過波前編碼生成亞衍射極限點(diǎn)PSF,以實(shí)現(xiàn)超分辨率成像。類似地,通過使用波前編碼使PSF對錯(cuò)誤聚焦不敏感,可以擴(kuò)展成像深度。對于其他信息,如物體的深度、光譜和偏振,可以編碼到PSF中來增加成像維度。上述計(jì)算成像技術(shù)在很大程度上依賴于PSF的先驗(yàn)信息,并且SC-RUN允許獲得高保真度、高信噪比的PSF。因此,當(dāng)已知前向算子時(shí),可以獲得極好的重建結(jié)果。此外,由于SC-RUN在不需要數(shù)據(jù)集和標(biāo)簽的情況下強(qiáng)制測量一致性,并且考慮到大多數(shù)成像任務(wù)涉及具有已知正向算子的一個(gè)或多個(gè)逆求解模型,SC-RUN可以容易地應(yīng)用于各種其他成像任務(wù)。
論文總結(jié)
本文提出了一種通用的無監(jiān)督的非相干全息3D重建框架SC-RUN,它結(jié)合了非線性重建方法的物理知識和前向成像模型,通過具有額外物理約束的神經(jīng)網(wǎng)絡(luò)執(zhí)行重建任務(wù)。SC-RUN同時(shí)考慮了時(shí)間分辨率和保真度,具有良好的魯棒性,并且不需要太多標(biāo)記的數(shù)據(jù)驅(qū)動(dòng)信息。此外,實(shí)驗(yàn)結(jié)果表明,首次在非相干全息術(shù)中實(shí)現(xiàn)了具有強(qiáng)度變化的復(fù)雜物體的高保真度重建。SC-RUN通常適用于各種光學(xué)配置,并易于適應(yīng)其他成像任務(wù)。此外,SC-RUN對超分辨率成像、孔徑成像、景深擴(kuò)展成像和多維信息復(fù)用等領(lǐng)域具有廣泛潛力,為獲得動(dòng)態(tài)光場的多維信息鋪平了道路。
文章鏈接:https://doi.org/10.1002/lpor.202301091
審核編輯 黃宇
-
3D
+關(guān)注
關(guān)注
9文章
2862瀏覽量
107324 -
成像
+關(guān)注
關(guān)注
2文章
230瀏覽量
30459 -
3D成像
+關(guān)注
關(guān)注
0文章
98瀏覽量
16044 -
深度學(xué)習(xí)
+關(guān)注
關(guān)注
73文章
5492瀏覽量
120975
發(fā)布評論請先 登錄
相關(guān)推薦
傅里葉光場顯微成像技術(shù)—2D顯微鏡實(shí)現(xiàn)3D成像

神經(jīng)網(wǎng)絡(luò)如何用無監(jiān)督算法訓(xùn)練
深度學(xué)習(xí)中的無監(jiān)督學(xué)習(xí)方法綜述
全息投影空中成像原理是什么
奧比中光攜多款3D相機(jī)深度參與國內(nèi)3D視覺最高規(guī)格會議

基于深度學(xué)習(xí)的方法在處理3D點(diǎn)云進(jìn)行缺陷分類應(yīng)用

中國科研團(tuán)隊(duì)突破全息3D顯示技術(shù)
超透鏡陣列可實(shí)現(xiàn)下一代真3D近眼顯示器
高精度彩色3D相機(jī):開啟嶄新的彩色3D成像時(shí)代

面向3D增強(qiáng)現(xiàn)實(shí)(AR)眼鏡的波導(dǎo)全息顯示
友思特分享 | 高精度彩色3D相機(jī):開啟嶄新的彩色3D成像時(shí)代

兩種應(yīng)用于3D對象檢測的點(diǎn)云深度學(xué)習(xí)方法

深度解析3D視覺成像幾種典型方案

深度學(xué)習(xí)神器DYnet++:輕松駕馭復(fù)雜自由曲面,3D測量無難度!
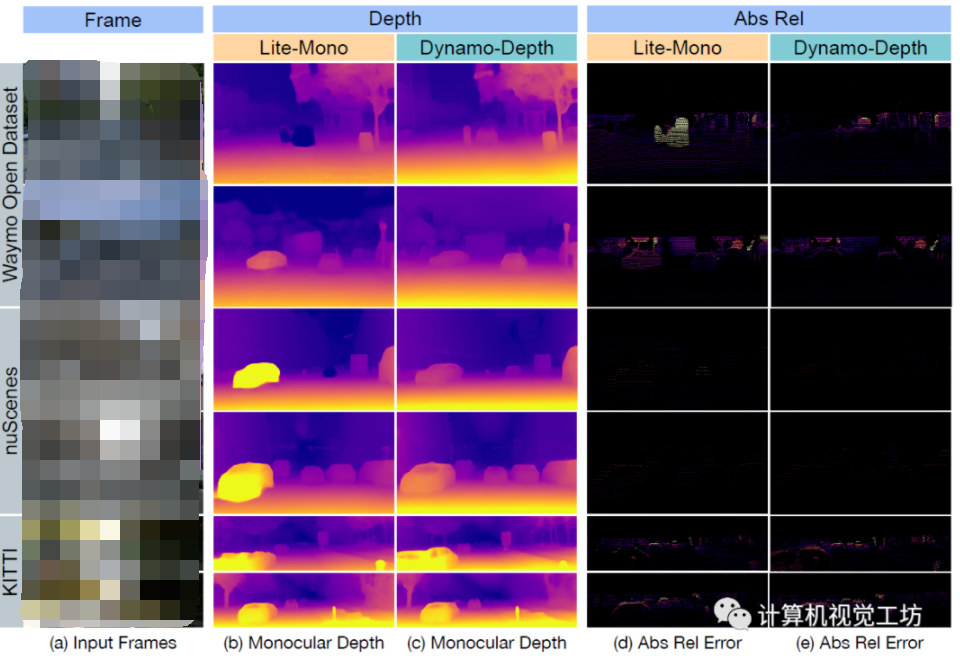
動(dòng)態(tài)場景下的自監(jiān)督單目深度估計(jì)方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論