 【GD32H757Z海棠派開發板使用手冊】第九講 USART-printf打印實驗
【GD32H757Z海棠派開發板使用手冊】第九講 USART-printf打印實驗

9.1實驗內容
通過本實驗主要學習以下內容:
9.2實驗原理
9.2.1串口簡介
串口,從廣義上看,指所有串行通信接口,比如RS232、RS422、RS485、SPI、IIC等。串行通訊是指僅用一根接收線和一根發送線就能將數據以位進行傳輸的通訊方式。和串行通訊相對應的是并行通訊,并行通信指一個傳輸接口可以傳輸8個bit即一個byte(有時甚至更多),雖然串行通信比并行通信慢,但是串口可以在僅僅使用兩根線的情況下就能實現數據的傳輸。
對于GD32H757來說,串口一般特指USART(通用同步異步收發器 )和UART(通用異步收發器 )。USART/UART提供了一個靈活方便的串行數據交換接口,數據幀可以通過全雙工或半雙工,同步或異步的方式進行傳輸。海棠派開發板搭載的GD32H757最多有8個串口(USART+UART), 對于一般應用來說足夠使用了。
9.2.2串口通信幀介紹
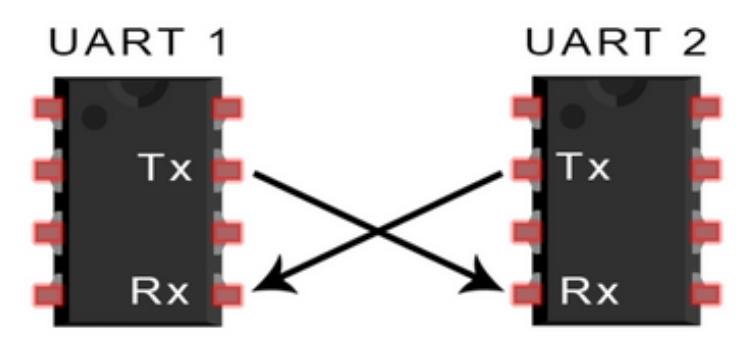
GD32H757的串口通信只需要3條線組成,分別為TX(發送線)、RX(接收線)和GND,對于兩個通信結點,TX和RX需要交叉連接,如下示例:
下面來介紹下串口數據幀組成。
以下為一個標準的串口通信幀:
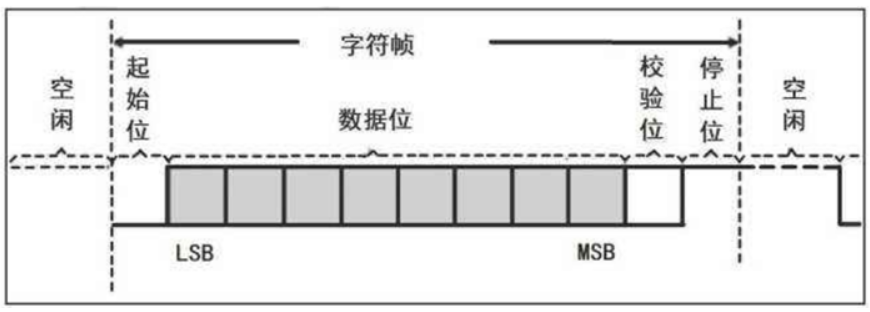
一個串口幀由空閑、起始位、數據位、校驗位以及停止位組成,傳輸的數據地位在前,高位再后。
空閑:串口TX或RX數據線上沒有傳輸任何數據時,則該線處于為空閑狀態。空閑是TX和RX都是處于高電平。
起始位:占一個bit時間,標志數據起始,由一個邏輯0(低電平)的數據位表示。當發送方開始發送一幀數據時,起始位會最先發送,而對于接收方來說,檢測到起始位后,即使自己的接收時鐘與發送方的數據同步。
數據位:數據位緊跟在起始位之后,是通信中的真正有效信息。數據位的位數可以由通信雙方共同約定,對于GD32H757來說,數據位一般只有8位。
校驗位:校驗位占一bit時間,GD32H757可以設置校驗位為:奇校驗、偶校驗或無校驗。校驗位是為了保證通信的可靠性,如果是奇校驗,需要保證傳輸的數據總共有奇數個邏輯高位,如果是偶校驗,需要保證傳輸的數據總共有偶數個邏輯高位。以傳輸傳輸數據A:0x01000001為例,如果設置了奇校驗,則需要在校驗位傳輸“1”,如果是偶檢驗,則傳輸“0”。奇偶校驗是由硬件處理的,當設置好校驗位后,硬件會自動根據需要傳輸的數據自動插入校驗位。
注意:GD32H757的數據位可設置為8bit和9bit兩種方式,當設置了奇校驗或偶校驗,一定要將數據位設置為9bit;而設置了無校驗時,需要將數據位設置為8bit。 |
停止位:它是一幀數據的結束標志,可以是1bit、1.5bit、2bit個邏輯“1”。
9.2.3串口波特率
波特率是串口通信中一個非常重要的參數,串口通信傳輸雙方必須要設置一樣的串口波特率,否則通訊就會出錯。波特率可以認為是比特率,即每秒傳輸的位數。一般波特率可以是9600、19200、115200等等,如果設置波特率為9600,設置通信幀為1bit起始位+8bit數據幀+無校驗+1bit停止位,那么每秒鐘最多可以傳輸9600bit/10bit = 960個字節。
現在重點介紹下GD32H757串口接收器的工作原理。GD32H757串口接收器支持16倍(默認)過采樣和8倍過采樣,16位過采樣即發送方發送數據后,GD32470串口接受器會將每個bit采樣16次,如果是8倍過采樣,則采用8次。下圖為16位過采樣的示意圖:
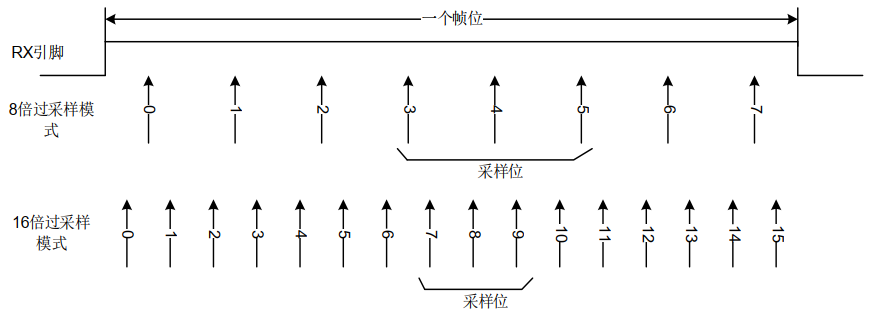
在默認情況下,接收器通過獲取三個采樣點的值來估計該位的值,其中16倍過采樣選取采樣點為第7、8、9點,而8倍過采樣為第3、4、5采樣點。如果在3個采樣點中有2個或3個為0,該數據位被視為0,否則為1。如果3個采樣點中有一個采樣點的值與其他兩個不同,不管是起始位,數據位,奇偶校驗位或者停止位,都將產生噪聲錯誤(NERR)。
9.2.4GD32H757串口設置步驟
串口設置的一般步驟為:
- GPIO時鐘開啟、串口時鐘開啟
- GPIO設置,發送和接受都要設置為AF模式,且需要設置為正確的AF號
- 串口復位
- 串口參數配置,主要為波特率、數據位長度、校驗位設置、停止位長度
- 依據是否需要使用中斷或DMA進行中斷配置或DMA配置
- 使能串口
- 編寫中斷處理函數
9.3硬件設計
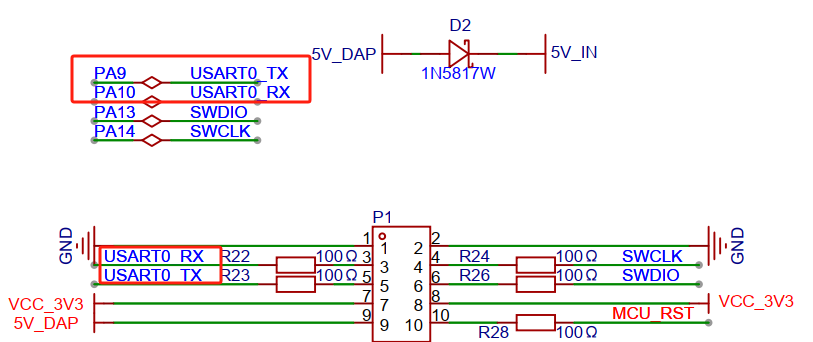
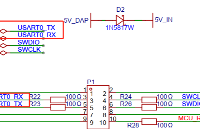
海棠派開發板的P1接口將USART0——PA9、PA10引出,讀者可以通過P1口使用USART0:
9.4代碼解析
9.4.1在driver_uart.c中定義了串口初始化函數driver_uart_init。
| C void driver_uart_init(typdef_uart_struct *uartx) { rcu_periph_clock_enable(uartx->rcu_uart_x); /* USART configure */ usart_deinit(uartx->uart_x); driver_gpio_general_init(uartx->uart_rx_gpio); driver_gpio_general_init(uartx->uart_tx_gpio); if(uartx->uart_mode_rx==MODE_DMA) { if(uartx->uart_rx_dma!=NULL) { driver_dma_com_init(uartx->uart_rx_dma,(uint32_t)&USART_RDATA(uartx->uart_x),NULL,DMA_Width_8BIT,DMA_PERIPH_TO_MEMORY); usart_interrupt_enable(uartx->uart_x,USART_INT_IDLE); } } if(uartx->uart_mode_tx==MODE_DMA) { if(uartx->uart_tx_dma!=NULL) { driver_dma_com_init(uartx->uart_tx_dma,(uint32_t)&USART_TDATA(uartx->uart_x),NULL,DMA_Width_8BIT,DMA_MEMORY_TO_PERIPH); // usart_interrupt_enable(uartx->uart_x,USART_INT_TC); } } usart_baudrate_set(uartx->uart_x, uartx->baudrate); usart_receive_config(uartx->uart_x, USART_RECEIVE_ENABLE); usart_transmit_config(uartx->uart_x, USART_TRANSMIT_ENABLE); usart_word_length_set(uartx->uart_x, uartx->data_length); usart_parity_config(uartx->uart_x, uartx->parity); usart_enable(uartx->uart_x); } |
9.4.2重定向函數int fputc(int ch, FILE *f)
要使用Printf,重定向函數fputc是必須的。在C 語言標準庫中,fputc函數是printf 函數內部的一個函數,功能是將字符ch寫入到文件指針file所指向文件的當前寫指針位置,簡單理解就是把字符寫入到特定文件中。我們使用USART函數重新修改fputc函數內容,達到類似“寫入”的功能。
fputc定義在bsp_uart.c中
| C int fputc(int ch, FILE *f) { driver_uart_transmit_byte(&BOARD_UART,(uint8_t)ch); return ch; } |
這個函數比較簡單,就是調用了接口driver_uart_transmit_byte,該接口定義在driver_uart.c中:
| C Drv_Err driver_uart_transmit_byte(typdef_uart_struct *uartx,uint8_t data) { __IO uint64_t timeout = driver_tick; while(uartx->uart_control.Com_Flag.Bits.SendState==1){ if((timeout+UART_TIMEOUT_MS) <= driver_tick) { ????????????? uartx->uart_control.Com_Flag.Bits.SendState=0; return DRV_ERROR; } } Drv_Err uart_state=DRV_SUCCESS; uartx->uart_control.Com_Flag.Bits.SendSuccess=0; uartx->uart_control.Com_Flag.Bits.SendState=1; uart_state=driver_uart_flag_wait_timeout(uartx,USART_FLAG_TBE,SET); usart_data_transmit(uartx->uart_x,data); uartx->uart_control.Com_Flag.Bits.SendSuccess=1; uartx->uart_control.Com_Flag.Bits.SendState=0; return uart_state; } |
這段代碼作用是,循環去讀串口的TBE標志位,并且將待發送的數據寫到串口寄存器中。
9.4.3main函數實現
串口初始化完成并定義好fputc重定向函數后,就可以通過printf函數往電腦上打印數據了。以下main函數:
| C int main(void) { //延時和公共驅動部分初始化 driver_init(); //串口初始化,DMA模式開啟 BOARD_UART.uart_mode_tx=MODE_DMA; bsp_uart_init(&BOARD_UART); bsp_led_init(&LED2); //打開對應串口的中斷 nvic_irq_enable(USART0_IRQn,2,0); while(1) { //printg標準打印(輪訓) printf_log("\r\ndelay 1s \r\n"); delay_ms(1000); bsp_led_toggle(&LED2); printf_log("printf:system driver_tick is %lld \r\n",driver_tick); //輪訓方式打印 memset(uart_poll_buff,0,50);//清零buff sprintf((char*)uart_poll_buff,"poll transmit:system driver_tick is %lld \r\n",driver_tick);//格式化字符串 driver_uart_poll_transmit(&BOARD_UART,uart_poll_buff,strlen((const char*)uart_poll_buff)); printf_log("%s",uart_poll_buff); //中斷方式打印 memset(uart_int_buff,0,50); sprintf((char*)uart_int_buff,"int transmit:system driver_tick is %lld \r\n",driver_tick); driver_uart_int_transmit(&BOARD_UART,uart_int_buff,strlen((const char*)uart_int_buff)); printf_log("%s",uart_int_buff); //DMA方式打印 memset(uart_dma_buff,0,50); sprintf((char*)uart_dma_buff,"dma transmit:system driver_tick is %lld \r\n",driver_tick); driver_uart_dma_transmit(&BOARD_UART,uart_dma_buff,strlen((const char*)uart_dma_buff)); printf_log("%s",uart_dma_buff); } } |
本例程main函數首先進行了延時函數初始化,并設置了一個LED燈用來提示代碼運行。while(1)循環中先延時1s,再翻轉一次LED狀態,接著使用printf函數打印系統運行tick時間。
本例程也同步做了printf打印在LCD屏幕的功能,將LCD屏接在海棠派開發板上后,打印信息將同步在顯示屏上顯示。
9.5實驗結果
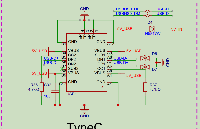
使用USB轉TTL串口的連接線后,配置好串口調試助手,即可看到每秒鐘串口打印的數據了。
-
打印
+關注
關注
1文章
64瀏覽量
18696 -
開發板
+關注
關注
25文章
4943瀏覽量
97188 -
USART
+關注
關注
1文章
195瀏覽量
30790 -
GD32
+關注
關注
7文章
403瀏覽量
24218 -
Printf
+關注
關注
0文章
81瀏覽量
13624
發布評論請先 登錄
相關推薦
【GD32H757Z海棠派開發板使用手冊】第四講 FMC-片內Flash擦寫讀實驗
【GD32F470紫藤派開發板使用手冊】第九講 USART-printf打印實驗
【GD32H757Z海棠派開發板使用手冊】第十三講 SDIO-SD卡讀寫實驗

【GD32H757Z海棠派開發板使用手冊】第二講 GPIO-按鍵查詢檢測實驗
【GD32H757Z海棠派開發板使用手冊】第五講 PMU-低功耗實驗
【GD32H757Z海棠派開發板使用手冊】第八講 ADC-規則組多通道采樣實驗
【GD32H757Z海棠派開發板使用手冊】第十一講 SPI-SPI NOR FLASH讀寫實驗

【GD32H757Z海棠派開發板使用手冊】第十二講 SDIO-SD卡讀寫實驗
【GD32F303紅楓派開發板使用手冊】第二十講 SPI-SPI NAND FLASH讀寫實驗





 工商網監
工商網監
評論