") GNSS仿真測(cè)試之三種常用坐標(biāo)系與轉(zhuǎn)換
GNSS仿真測(cè)試之三種常用坐標(biāo)系與轉(zhuǎn)換
作者介紹
在當(dāng)今的全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)技術(shù)領(lǐng)域,仿真測(cè)試是評(píng)估和驗(yàn)證GNSS接收機(jī)性能的關(guān)鍵環(huán)節(jié),全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)仿真測(cè)試是確保GNSS接收機(jī)和導(dǎo)航解決方案在實(shí)際部署前能夠正確、可靠地工作的關(guān)鍵步驟。無論是為了確保定位精度、測(cè)試信號(hào)干擾的影響,還是評(píng)估在復(fù)雜環(huán)境下的導(dǎo)航可靠性,掌握正確的坐標(biāo)系知識(shí)對(duì)于進(jìn)行有效的仿真測(cè)試至關(guān)重要。
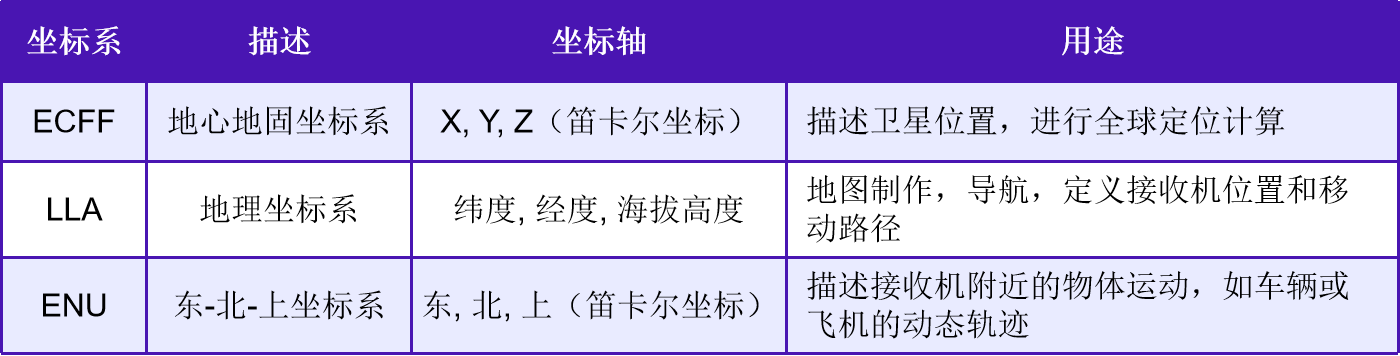
在GNSS仿真測(cè)試的領(lǐng)域,三種關(guān)鍵的坐標(biāo)系構(gòu)成了我們工作的核心:地心地固坐標(biāo)系(ECEF)、地理坐標(biāo)系(LLA,包括緯度、經(jīng)度和海拔高度)以及本地水平坐標(biāo)系(ENU,即東-北-上)。
本文不僅將詳細(xì)介紹這三種坐標(biāo)系的概念和特點(diǎn),還將探討它們?cè)贕NSS仿真測(cè)試中的具體應(yīng)用。我們將學(xué)習(xí)如何在實(shí)際的仿真環(huán)境中使用這些坐標(biāo)系,以及如何在不同坐標(biāo)系之間進(jìn)行精確的轉(zhuǎn)換。這些轉(zhuǎn)換對(duì)于確保仿真測(cè)試的準(zhǔn)確性至關(guān)重要,因?yàn)樗鼈冊(cè)试S我們將衛(wèi)星的全球位置與接收機(jī)的局部視角相匹配。掌握這些坐標(biāo)系的轉(zhuǎn)換技能都將極大地提升您在GNSS仿真測(cè)試中的工作效率和成果的質(zhì)量。
一、坐標(biāo)系介紹
1.ECFF(Earth-Centered, Earth-Fixed)
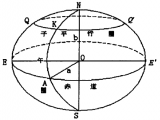
ECEF坐標(biāo)系是一個(gè)笛卡爾坐標(biāo)系,一般中文叫做地心地固坐標(biāo)系,其原點(diǎn)位于地球質(zhì)心,X軸通過本初子午面和赤道的交點(diǎn),Y軸位于赤道面上,通過東經(jīng)90度,Z軸指向北極點(diǎn)。這個(gè)坐標(biāo)系隨著地球一起旋轉(zhuǎn),因此它固定在地球上。比如,鳥巢的ECEF坐標(biāo)約為(-2175804.26,4383129.27,4077167.07),單位為米(m)。
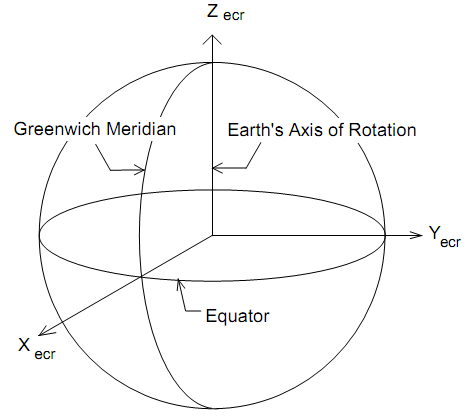
在ECEF坐標(biāo)系中,地球上的任何點(diǎn)都可以用三個(gè)坐標(biāo)值(X, Y, Z)來表示,分別表示該點(diǎn)相對(duì)于地球質(zhì)心的位置。這個(gè)坐標(biāo)系對(duì)于全球定位系統(tǒng)(GPS)和其他GNSS系統(tǒng)尤其重要,因?yàn)樾l(wèi)星的位置通常以ECEF坐標(biāo)來表示,經(jīng)常被用來精確描述衛(wèi)星的位置和計(jì)算衛(wèi)星與接收機(jī)之間的距離。
2.LLA(Latitude, Longitude, Altitude)
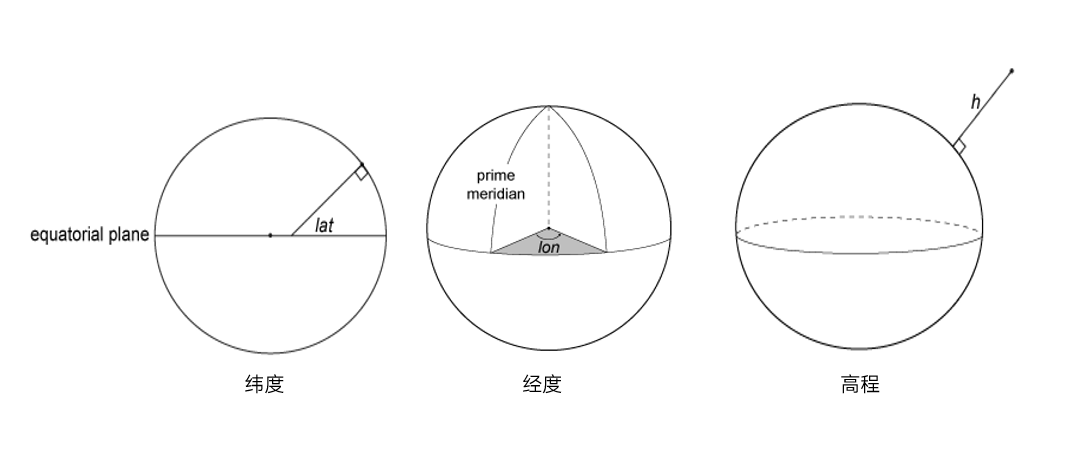
LLA坐標(biāo)系是一個(gè)球面坐標(biāo)系,一般稱為地理坐標(biāo)系,或根據(jù)三軸命名為緯經(jīng)高坐標(biāo)系,用于描述地球上某一點(diǎn)的位置。它由三個(gè)參數(shù)組成:
● 緯度(Latitude):指從赤道(0度緯度)到北極(90度北緯)或南極(90度南緯)的角度測(cè)量,它確定了地球表面上一個(gè)點(diǎn)的東西位置,范圍為-90°~90°,
● 經(jīng)度(Longitude):指從本初子午線(0度經(jīng)度,通過格林尼治天文臺(tái))到東經(jīng)或西經(jīng)的角度測(cè)量,它確定了地球表面上一個(gè)點(diǎn)的南北位置,范圍為-180°~180°(或0~360°),
● 海拔高度(Altitude):指從地球表面(通常是平均海平面)到某一點(diǎn)的垂直距離。這個(gè)高度可以是從參考橢球體(如WGS84橢球體)的表面計(jì)算出的幾何高度,也可以是從平均海平面計(jì)算出的正高或從大地水準(zhǔn)面計(jì)算出的正常高。
比如,鳥巢的LLA坐標(biāo)為(39.99°,116.40°,50m)。
LLA坐標(biāo)系是我們?cè)谌粘I钪凶畛=佑|到的坐標(biāo)系,如地圖制作、導(dǎo)航和地理信息系統(tǒng)(GIS)中廣泛使用,或用于將地球表面的位置轉(zhuǎn)換為其他坐標(biāo)系。在GNSS仿真測(cè)試中,LLA坐標(biāo)系常用于定義接收機(jī)的初始位置和移動(dòng)路徑。
3.ENU(East-North-Up)
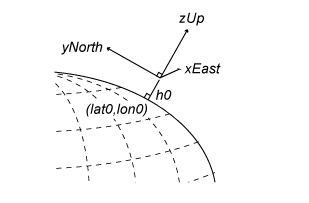
ENU坐標(biāo)系是一個(gè)笛卡爾坐標(biāo)系,是一個(gè)局部的本地水平坐標(biāo)系,也稱為東北天(東北上)坐標(biāo)系。其原點(diǎn)位于地球表面上的一個(gè)特定點(diǎn),通常與接收機(jī)的位置相對(duì)應(yīng)。在ENU坐標(biāo)系中,東軸(East)指向當(dāng)?shù)氐臇|方向,北軸(North)指向當(dāng)?shù)氐谋狈较颍陷S(Up)垂直于水平面,指向天空。本地原點(diǎn)由大地坐標(biāo)( lat0、lon0、h0 )描述。請(qǐng)注意,原點(diǎn)不一定位于橢球體的表面上。
若以鳥巢本身為原點(diǎn),那么他的ENU坐標(biāo)為(0,0,0),單位為m。
ENU坐標(biāo)系常用于描述接收機(jī)附近的物體運(yùn)動(dòng),如車輛的行駛軌跡或無人機(jī)的飛行路徑,因?yàn)樗峁┝艘粋€(gè)與接收機(jī)位置直接相關(guān)的坐標(biāo)系。
4.三個(gè)坐標(biāo)系的對(duì)比
除此之外,還有一些常用的坐標(biāo)系,例如NED坐標(biāo)系(東北下坐標(biāo)系)、AER坐標(biāo)系(方位角-仰角-范圍本地坐標(biāo)系)等。
二、三個(gè)坐標(biāo)系的轉(zhuǎn)換
ECEF(地心地固坐標(biāo)系)、LLA(地理坐標(biāo)系)和ENU(東-北-上坐標(biāo)系)之間的轉(zhuǎn)換是通過一系列數(shù)學(xué)公式實(shí)現(xiàn)的。以下是這些坐標(biāo)系之間轉(zhuǎn)換的基本方法:
1.ECEF到LLA的轉(zhuǎn)換:
這種轉(zhuǎn)換涉及到從笛卡爾坐標(biāo)(X, Y, Z)到球面坐標(biāo)(緯度, 經(jīng)度, 海拔高度)的轉(zhuǎn)換。
● 首先,可以通過X和Y坐標(biāo)計(jì)算出經(jīng)度,通過Z坐標(biāo)和地球的扁率計(jì)算出緯度。
● 然后,使用地球的參考橢球模型(如WGS84)來計(jì)算海拔高度。
2.LLA到ECEF的轉(zhuǎn)換:
這種轉(zhuǎn)換是從球面坐標(biāo)到笛卡爾坐標(biāo)的轉(zhuǎn)換。
● 經(jīng)度和緯度可以直接用于計(jì)算ECEF坐標(biāo)中的X和Y值。
● 海拔高度和地球的參考橢球模型用于計(jì)算Z值。
3.ECEF到ENU的轉(zhuǎn)換:
這種轉(zhuǎn)換通常需要一個(gè)參考點(diǎn),該點(diǎn)的LLA坐標(biāo)已知。
● 首先,將參考點(diǎn)的ECEF坐標(biāo)轉(zhuǎn)換為L(zhǎng)LA坐標(biāo)。
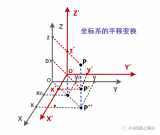
● 然后,使用參考點(diǎn)的LLA坐標(biāo),通過一系列旋轉(zhuǎn)和平移變換,將ECEF坐標(biāo)轉(zhuǎn)換為ENU坐標(biāo)。
4.ENU到ECEF的轉(zhuǎn)換:
這是ECEF到ENU轉(zhuǎn)換的逆過程。
● 首先,根據(jù)參考點(diǎn)的LLA坐標(biāo)計(jì)算坐標(biāo)點(diǎn)的LLA坐標(biāo)
● 經(jīng)度和緯度可以直接用于計(jì)算ECEF坐標(biāo)中的X和Y
● 海拔高度和地球的參考橢球模型用于計(jì)算Z值。
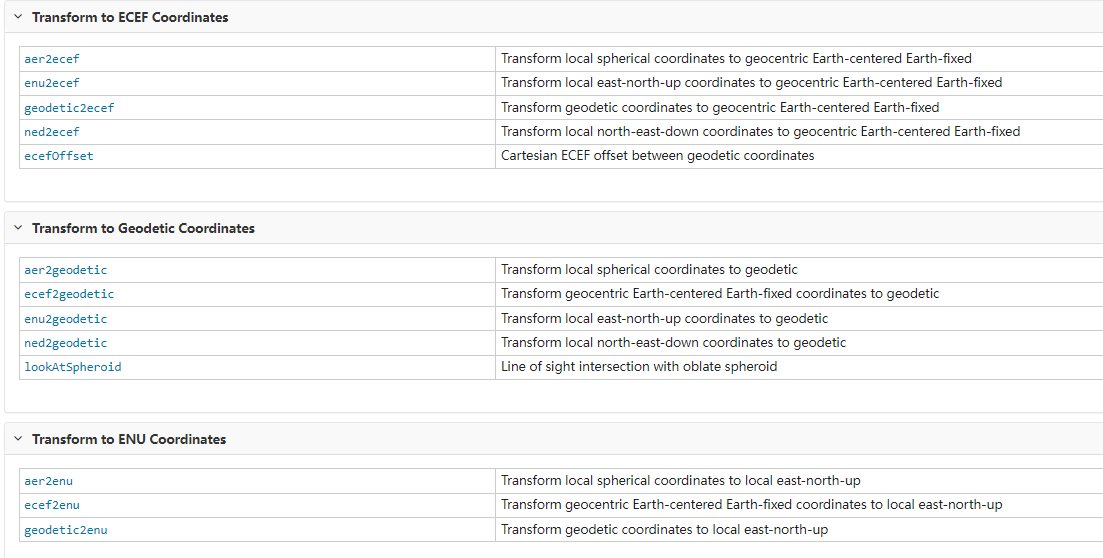
這些轉(zhuǎn)換涉及到復(fù)雜的數(shù)學(xué)計(jì)算,包括球面三角學(xué)、旋轉(zhuǎn)矩陣和橢球幾何學(xué)。
在實(shí)際應(yīng)用中,這些轉(zhuǎn)換通常通過專業(yè)的數(shù)學(xué)庫(kù)或GIS軟件來實(shí)現(xiàn),如PROJ、GDAL或MATLAB的地理工具箱等。
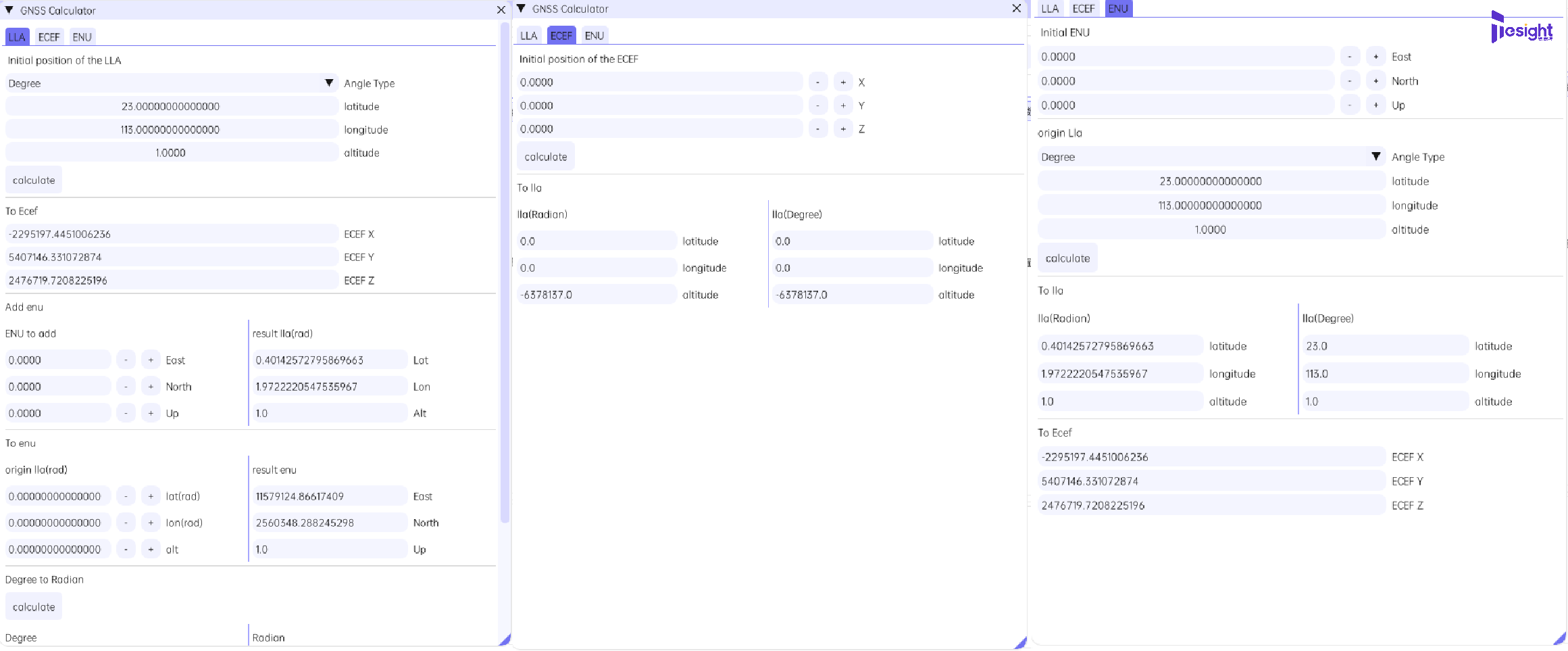
德思特AutoTest自動(dòng)化測(cè)試平臺(tái)為用戶提供三種坐標(biāo)軸的快速轉(zhuǎn)換工具,簡(jiǎn)單輸入現(xiàn)有坐標(biāo)點(diǎn)即可完成對(duì)其他兩個(gè)坐標(biāo)系的轉(zhuǎn)換。
審核編輯 黃宇
-
GNSS
+關(guān)注
關(guān)注
9文章
761瀏覽量
47841 -
仿真測(cè)試
+關(guān)注
關(guān)注
0文章
75瀏覽量
11289
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
abb機(jī)器人工具坐標(biāo)系問題
橋式三坐標(biāo)測(cè)量機(jī)和影像測(cè)量三坐標(biāo)介紹


GNSS仿真引擎Skydel軟件使用培訓(xùn)課程-先導(dǎo)課 #GNSS模擬 #GNSS仿真 #gnss
三坐標(biāo)測(cè)量?jī)x與影像測(cè)量?jī)x相比有什么區(qū)別

深入解析坐標(biāo)轉(zhuǎn)換應(yīng)用實(shí)踐
GNSS工作原理示意圖

信號(hào)之時(shí)域如何轉(zhuǎn)換成頻域
arcmap如何設(shè)置地理坐標(biāo)系
國(guó)產(chǎn)三坐標(biāo)測(cè)量機(jī)|中圖儀器全自主研發(fā),實(shí)現(xiàn)高精度三維尺寸測(cè)量
【先楫HPM5361EVK開發(fā)板試用體驗(yàn)】06-基于MPU9250的姿態(tài)解算
應(yīng)用衛(wèi)星通信領(lǐng)域的一個(gè)坐標(biāo)轉(zhuǎn)換過程—機(jī)體坐標(biāo)系與ENU坐標(biāo)系的轉(zhuǎn)換

相機(jī)標(biāo)定中的坐標(biāo)變換原理難點(diǎn)分析

三維空間直角坐標(biāo)系的平移和旋轉(zhuǎn)變換





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論