") 機(jī)器人高效導(dǎo)航定位背后SLAM專用芯片的崛起
機(jī)器人高效導(dǎo)航定位背后SLAM專用芯片的崛起
電子發(fā)燒友網(wǎng)報(bào)道(文/李寧遠(yuǎn))對(duì)移動(dòng)機(jī)器人來說,導(dǎo)航定位是最基本最核心的功能之一,機(jī)器人自主移動(dòng)能力建立在出色的導(dǎo)航定位基礎(chǔ)上。目前移動(dòng)機(jī)器人應(yīng)用得最廣泛的導(dǎo)航定位技術(shù)無疑是SLAM技術(shù)。
SLAM技術(shù)是定位與地圖構(gòu)建技術(shù),其重要的理論與應(yīng)用價(jià)值被認(rèn)為是實(shí)現(xiàn)自動(dòng)駕駛和全自主移動(dòng)機(jī)器人的關(guān)鍵技術(shù)。小到掃地機(jī)器人,大到自動(dòng)駕駛汽車,無人自主移動(dòng)設(shè)備近些年的快速發(fā)展加速了SLAM行業(yè)的發(fā)展,為了利用這些市場(chǎng)機(jī)會(huì),技術(shù)供應(yīng)商正在整合SLAM先進(jìn)軟硬技術(shù)進(jìn)行行業(yè)布局。
機(jī)器人芯片與SLAM
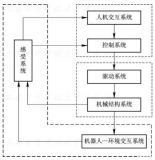
目前機(jī)器人系統(tǒng)中,各種芯片的組合多種多樣,有機(jī)器人專用SoC方案、通用SoC加模組方案以及各種以MCU基礎(chǔ)的組合方案。這些芯片組合構(gòu)筑成機(jī)器人底層硬件基礎(chǔ),各種強(qiáng)大的功能都建立在這些硬件控制上。
以硬件為基礎(chǔ),機(jī)器人系統(tǒng)還有一些關(guān)鍵點(diǎn),如智能算法、傳感器、多機(jī)協(xié)作、協(xié)同控制等。而且隨著人工智能、大模型的快速發(fā)展,現(xiàn)在基于多傳感器的多模態(tài)大模型也開始在機(jī)器人中占據(jù)重要地位。
智能算法加上傳感器就是SLAM的核心,實(shí)現(xiàn)SLAM需要這兩類技術(shù)作為支撐,一是傳感器信號(hào)處理(包括前端處理),二是位姿圖優(yōu)化(包括后端處理),這類技術(shù)與傳感器無關(guān)取決于后端的算法處理。從傳感器方向上來看,目前機(jī)器人中的SLAM技術(shù)主要應(yīng)用了視覺SLAM和激光雷達(dá)SLAM兩條技術(shù)路線,兩條技術(shù)路線均有不少落地的機(jī)器人項(xiàng)目,二者也各有優(yōu)勢(shì)。
現(xiàn)在更是在推進(jìn)3D SLAM,2D傳感已經(jīng)無法滿足日益復(fù)雜的機(jī)器人終端需求,即以3D傳感器為核心,通過對(duì)激光雷達(dá)/視覺、IMU、里程計(jì)、GPS等各類傳感器進(jìn)行數(shù)據(jù)融合處理,配置高性能處理器,實(shí)現(xiàn)對(duì)無人車環(huán)境的建圖以及匹配定位功能。
為了實(shí)現(xiàn)性能更高的SLAM效果,上游的芯片廠商會(huì)自研SLAM算法將算法在芯片層面硬件化,傳感器廠商也有不少做SLAM,與傳感器件打包成整個(gè)導(dǎo)航模塊提供給下游設(shè)備廠商。在這種趨勢(shì)下,將SLAM硬件化的芯片越來越多。
算法芯片化后的SLAM專用芯片
SLAM專用芯片應(yīng)該說解決了目前行業(yè)內(nèi)不少痛點(diǎn),以往軟件化3D算法+FPGA或者高性能處理器的方案往往功耗很大,SLAM部分上耗時(shí)也長(zhǎng)。如果涉及復(fù)雜場(chǎng)景,如AMR、無人機(jī),各種3D感知的配件BOM高,做傳感器融合也非常復(fù)雜。
將傳感導(dǎo)航算法芯片化后,進(jìn)行單芯片的全集成能夠有效解決目前這些行業(yè)痛點(diǎn)。目前這些產(chǎn)品已經(jīng)有廠商在做,而且相關(guān)芯片產(chǎn)品也比較有代表性。
如銀牛微電子即將推出第二代3D SLAM系統(tǒng)級(jí)芯片NU4500,是集3D視覺感知、AI及SLAM硬件引擎為一體的3D空間計(jì)算系統(tǒng)級(jí)芯片,是目前全球唯一實(shí)現(xiàn)三者合一的單芯片解決方案。
該芯片具備8核高性能CPU,可作為自主移動(dòng)機(jī)器人主控使用,可同時(shí)處理10路攝像頭信息,僅一顆芯片便可實(shí)現(xiàn)多傳感器融合,同時(shí)芯片配置的邊緣端AI算力進(jìn)一步提升,最高可高達(dá) 7.5TOPS,能提供完整的邊緣端深度學(xué)習(xí)算法庫和解決方案。
專注于機(jī)器人芯片設(shè)計(jì)的一微半導(dǎo)體在SLAM專用系統(tǒng)芯片領(lǐng)域同樣卓有建樹,是少有的同時(shí)能提供慣性導(dǎo)航eSLAM、激光SLAM導(dǎo)航和視覺導(dǎo)航vSLAM芯片、算法及完整解決方案的芯片商。
目前主推的機(jī)器人SLAM SoC AM890,運(yùn)算速度是通用SoC的3-8倍,整體功耗只有通用SoC的五分之一。該芯片同樣將SLAM算法硬件化,實(shí)現(xiàn)了IP自主研發(fā),用硬件加速和算法芯片化實(shí)現(xiàn)了GPU和FPGA功能,降低了BOM成本。
小結(jié)
機(jī)器人廠商需要這樣的SLAM專用系統(tǒng)級(jí)芯片來實(shí)現(xiàn)高效率的建圖定位,而且現(xiàn)在這些芯片的計(jì)算能力也能夠覆蓋復(fù)雜的導(dǎo)航運(yùn)算。隨著機(jī)器人市場(chǎng)的擴(kuò)張以及更多機(jī)器人場(chǎng)景被開發(fā)出來,市場(chǎng)會(huì)對(duì)SLAM專用系統(tǒng)級(jí)芯片愈發(fā)需要。
-
機(jī)器人
+關(guān)注
關(guān)注
210文章
28191瀏覽量
206505 -
SLAM
+關(guān)注
關(guān)注
23文章
419瀏覽量
31786
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
最新圖優(yōu)化框架,全面提升SLAM定位精度

SLAM:機(jī)器人如何在未知地形環(huán)境中進(jìn)行導(dǎo)航
精準(zhǔn)定位,深度清潔:揭秘工廠清潔機(jī)器人的核心技術(shù)
高效運(yùn)作的機(jī)器人背后,MT6835磁編碼IC是如何做到的?
精準(zhǔn)定位,激光領(lǐng)航——激光跟蹤儀助力服務(wù)機(jī)器人性能提升

工業(yè)機(jī)器人視覺技術(shù)的應(yīng)用分為哪幾種?
Al大模型機(jī)器人
轉(zhuǎn)運(yùn)機(jī)器人支持Wi-Fi漫游和無軌化激光SLAM導(dǎo)航技術(shù)
樂聚機(jī)器人與江蘇亨通攜手研發(fā)人形機(jī)器人專用線束
一微半導(dǎo)體:SLAM專用芯片為機(jī)器人系統(tǒng)實(shí)現(xiàn)高效率建圖導(dǎo)航復(fù)雜運(yùn)算

其利天下技術(shù)·搭載無刷電機(jī)的掃地機(jī)器人的前景如何?
什么是SLAM?SLAM算法涉及的4要素
工業(yè)機(jī)器人由哪些部分組成?
怎么去處理視覺SLAM長(zhǎng)期定位中的外觀變化和軌跡漂移呢?

ROS機(jī)器人如何使用Navigation導(dǎo)航包實(shí)現(xiàn)實(shí)時(shí)定位






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論