 盤點半導體物流自動化AMR技術與廠商
盤點半導體物流自動化AMR技術與廠商
在當今晶圓廠中,自動化技術的飛速發展已經將生產流程推向了一個全新的高度,傳統以OHT(天車)為主的AMHS模式正在發生革新,AMR(移動機器人)以柔性高效的物流模式成為先進制程場內物流的主要選擇。
在這背后,根植于工業物流自動化場景的AMR技術正在不斷演進,從第一代的導軌式機器人,到第三代集群作業的AMR矩陣,AMR正在從硬件性能持續優化的單體設備,轉變為半導體整廠智能化系統下的智能因子,邁向機器人軟硬件與整廠相關軟硬件的融合演進時代。
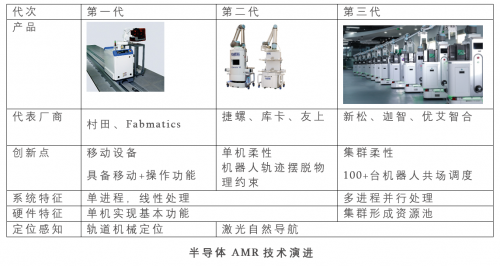
第一代AMR,也可以說是移動機器人的雛形,它們主要沿著固定的機械軌道或預定路線來實現自身的定位和抓取,缺乏靈活性,而且可能還需要人類操作員監督。
盡管實現了物料的自動化運輸,但是第一代移動機器人并沒有得到大規模普及,主要原因是半導體潔凈空間的造價太昂貴,地面的面積最好是用于放置生產設備,而不是鋪設很多軌道占用寶貴的面積。
大約在2015年左右,激光導航技術的成熟為移動機器人帶來了很大的提升。通過使用激光導航技術進行定位,第二代機器人徹底擺脫了固定軌道的物理約束,使用內置傳感器和攝像頭以及先進的軟件來識別周圍環境,并采取最有效的路線到達目的地,安全地避開障礙物和人員,無需對晶圓廠物理環節進行安裝和改造,直接可以在晶圓廠中運行。
不過,第二代與一代AMR在整個系統和硬件層面往往是以任務為主,系統采用單進程線性處理,功能較為單一,無法自主決策處理復雜性的任務,機器人之間也沒有太多的交互工作。更準確地來說,第一、二代AMR更多以“自動化設備”的形式呈現。
移動機器人真正迎來大的變革是從第二代向第三代的過程。
隨著半導體工廠產線物流自動化需求攀升,局部產線改造開始向完整工序段擴張,隨之而來的是,單個工廠內對于AMR的需求數量也增加至百臺級,如何在保障生產物流穩定高效的前提下實現大規模AMR的集群調度,是二代AMR亟待突破的技術掣肘。
部分AMR廠商開始跳脫出傳統AMR硬件優化的思維,轉而以半導體整場物流綜合效率提升的全局視角,以集群化重新定義AMR。
如果說第二代機器人突破了導航方式的物理束縛,那么第三代AMR則實現了從單機作業到集群協同的突破。從硬件上來看,大量機器人需要有資源池化的能力,具備多線程的并行處理能力。在這個資源池中,可能同時并發存在成百上千條任務。這個機器人集群的規模大約要達到100多臺,相比之下,在二代的時候,數量調度基本不超過20臺。
在第三代AMR的協同作業下,半導體生產不再僅滿足部分產線或工藝段的改造,而能夠從全廠的規劃出發,實現整場的物流自動化建設,給企業帶來效益提升。
其實自第三代移動機器人開始商用之后,客戶更加注重的已經是生產效率,而不僅是一個自動化設備。而深度剖析“綜合物流效率”,其影響因素分布在從硬件到整廠智能化系統的全棧范圍,既包含機器人軟硬件本身,更注重于機器人軟硬件與整廠內其他相關軟硬件的融合演進。可以期待的是,AMR在未來半導體物流自動化建設中,將引發巨大的物流效率變革。
審核編輯 黃宇
-
半導體
+關注
關注
334文章
27063瀏覽量
216497 -
機器人
+關注
關注
210文章
28231瀏覽量
206616 -
AMR
+關注
關注
3文章
423瀏覽量
30188
發布評論請先 登錄
相關推薦
第六屆意法半導體工業峰會2024
EDI電子芯片半導體領軍人物
機械自動化和電氣自動化區別是什么
工業自動化包含哪些技術領域
機械制造與自動化是自動化類嗎
工業自動化和自動化區別是什么
工業自動化包含哪些技術
機器視覺檢測技術在工業自動化中的應用
蕪湖船廠與華工科技雙方將圍繞產線自動化、物流智能化方面展開合作
AMR機器人如何賦能智慧物流?

AMR智能搬運機器人及其智能物流解決方案

三星電子智能傳感系統提升半導體工廠產量與自動化
RFID在物流、供應鏈管理、工業自動化等領域的廣泛應用
電源芯片自動化測試系統有什么功能?如何解決某半導體公司測試難點?





 工商網監
工商網監
評論