 伺服電機脈沖控制方式的基本原理
伺服電機脈沖控制方式的基本原理
一、引言
伺服電機脈沖控制方式,作為伺服電機驅動技術的重要組成部分,以其高精度、高穩定性和快速響應的特點,在現代工業自動化領域中發揮著不可或缺的作用。本文將對伺服電機脈沖控制方式的基本原理、應用特點、實現方式以及優缺點進行詳細的闡述,并通過實例分析來進一步加深對其理解。
二、伺服電機脈沖控制方式的基本原理
伺服電機脈沖控制方式是通過給伺服電機提供一系列的脈沖信號,控制電機的位置、速度和加速度等參數,實現對電機的高精度控制。其基本原理主要包括信號發生器、運動控制器和驅動器三個部分。
信號發生器
信號發生器是脈沖控制方式的起點,它負責產生一系列的脈沖信號。這些脈沖信號的頻率和寬度可以根據需要進行調整,用于控制電機的運動。通常,信號發生器使用計數器和定時器實現,可以根據設定的參數產生不同頻率和寬度的脈沖信號。
運動控制器
脈沖信號經過運動控制器進行處理。運動控制器接收到脈沖信號后,會進行相應的計算和處理,生成適合驅動器使用的信號。運動控制器的關鍵是根據脈沖信號的頻率和寬度計算出電機的運動參數,如位置、速度和加速度等。
驅動器
驅動器是伺服電機脈沖控制方式的執行者,它接收到運動控制器生成的信號后,將其轉換為電機能夠理解的信號。驅動器通常包含功率放大器和控制電路,能夠提供足夠的電流和電壓,驅動伺服電機進行運動。此外,驅動器還可以根據運動控制器生成的信號進行保護控制,例如過流保護和過載保護等。
三、伺服電機脈沖控制方式的應用特點
高精度控制
伺服電機脈沖控制方式通過高速脈沖信號對伺服電機進行精確控制,能夠實現高精度的定位和速度調節。這種控制方式的精度主要取決于脈沖信號的頻率和寬度,以及伺服電機的機械特性。在實際應用中,通過優化脈沖信號的參數和伺服電機的性能,可以實現微米級甚至納米級的定位精度。
快速響應
伺服電機脈沖控制方式的響應速度非常快,能夠在短時間內實現快速定位和高速運動。這主要得益于其閉環控制的特點,能夠實時監測實際值與設定值之間的偏差并進行調整。因此,在需要快速響應的應用場景中,如機器人、自動化生產線等,伺服電機脈沖控制方式具有顯著的優勢。
穩定性好
由于伺服電機脈沖控制方式采用閉環控制,能夠實時監測實際值與設定值之間的偏差并進行調整,因此具有較好的穩定性。即使在負載變化或外部干擾的情況下,也能夠保持較高的控制精度和穩定性。
四、伺服電機脈沖控制方式的實現方式
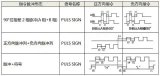
脈沖+方向模式
脈沖+方向模式是一種常見的伺服電機脈沖控制方式。它由脈沖和方向兩個信號組成,當方向信號為1時,伺服電機繞一個方向運動;當方向信號為0時,伺服電機繞另一個方向運動。這種方式適用于脈沖頻率不超過200kHz的情況,不適合長距離發送脈沖,且抗干擾能力較差。
CW/CCW模式
CW/CCW模式是一種雙脈沖控制方式,它有兩路脈沖信號,一路控制伺服電機正轉,一路控制伺服電機反轉。這種方式適用于輸出脈沖頻率超過200kHz以及長距離發送脈沖的情況,抗干擾能力強,信號傳輸的準確性較高。
AB相脈沖模式
AB相脈沖模式是通過A相和B相信號的相位差來控制伺服電機的運動方向。當A相脈沖超前于B相脈沖時,伺服電機正轉;當A相脈沖滯后于B相脈沖時,伺服電機反轉。這種方式通常用于需要更高精度和穩定性的應用場合。
五、伺服電機脈沖控制方式的優缺點
優點
(1)高精度控制:能夠實現微米級甚至納米級的定位精度。
(2)快速響應:響應速度快,適用于需要快速響應的應用場景。
(3)穩定性好:采用閉環控制,具有較好的穩定性。
缺點
(1)控制靈活性受限:由于伺服驅動器工作在位置方式下,位置環在伺服驅動器內部,導致系統的PID參數修改起來不方便。
(2)信號傳遞限制:對于長距離傳輸或高頻率脈沖信號傳輸時,可能會受到信號衰減或干擾的影響。
六、結論
伺服電機脈沖控制方式以其高精度、高穩定性和快速響應的特點,在現代工業自動化領域中得到了廣泛應用。在實際應用中,需要根據具體的應用場景和需求選擇合適的控制方式和參數設置,以實現最佳的控制效果。隨著技術的不斷發展和創新,伺服電機脈沖控制方式將不斷得到優化和完善,為工業自動化領域的發展提供更加強大的支持。
-
驅動器
+關注
關注
51文章
7996瀏覽量
144996 -
伺服電機
+關注
關注
85文章
2003瀏覽量
57298 -
脈沖控制
+關注
關注
0文章
18瀏覽量
8227
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論