 伺服驅動器和伺服控制器的區別
伺服驅動器和伺服控制器的區別
一、引言
在工業自動化和精密控制領域中,伺服驅動器和伺服控制器是兩個至關重要的組件,它們各自在伺服系統中扮演著不同的角色。盡管兩者在功能和目的上有所重疊,但在實際應用中,它們之間存在明顯的區別。本文將對伺服驅動器和伺服控制器的區別進行詳細的闡述,以便讀者能夠更清晰地理解兩者的差異。
二、伺服驅動器與伺服控制器的定義
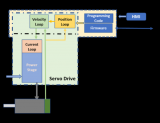
伺服驅動器:伺服驅動器又稱為“伺服控制器”或“伺服放大器”,是用來控制伺服電機的一種控制器。其作用類似于變頻器作用于普通交流馬達,屬于伺服系統的一部分,主要應用于高精度的定位系統。伺服驅動器通過接收控制信號,將其轉換為適合于伺服電機運動的驅動信號,以實現對電機運動參數的精準控制,例如位置、速度、力矩等。
伺服控制器:伺服控制器是一種電子設備,用于控制伺服電機的運動和位置。它通常包括微處理器、電源、信號接收電路、驅動電路等組成部分。伺服控制器通過接收控制信號(通常是脈沖信號或模擬信號),對伺服電機進行精準的控制,以實現所需的運動和位置控制。
三、伺服驅動器與伺服控制器的區別
功能定位
伺服驅動器:主要負責將控制信號轉換為電機運動的驅動信號,實現對電機運動參數的精準控制。它是伺服系統中的一個重要環節,確保電機能夠按照預定的軌跡和速度進行運動。
伺服控制器:不僅具有伺服驅動器的基本功能,還增加了更多的控制和調節功能。它能夠接收各種控制信號,如脈沖信號、模擬信號等,并根據這些信號對伺服電機進行更精確的控制。伺服控制器通常具有更復雜的控制算法和更高的靈活性,以滿足不同應用場景的需求。
控制方式不同
伺服驅動器:通常采用數字信號處理器(DSP)作為控制核心,實現數字化、網絡化和智能化的控制。它主要通過對電機的電流、速度和位置進行實時檢測和調節,以確保電機能夠按照預定的軌跡和速度進行運動。
伺服控制器:控制方式更為多樣和靈活。除了基本的電流、速度和位置控制外,伺服控制器還可以實現力矩控制、軌跡規劃、力控制等多種控制方式。這些控制方式能夠滿足不同應用場景下的控制需求,提高系統的精度和穩定性。
應用場景
伺服驅動器:廣泛應用于工業機器人、數控機床、印刷機、包裝機等需要高精度控制和高速響應的自動化系統中。在這些系統中,伺服驅動器能夠實現對電機運動參數的精準控制,確保系統的高效運行。
伺服控制器:不僅適用于上述應用場景,還廣泛應用于機器人控制、醫療設備、航空航天等領域。在這些領域中,伺服控制器能夠實現對伺服電機的精確控制和調節,滿足各種復雜的運動需求。
性能特點
伺服驅動器:具有高精度、高速度、高力矩等特點,能夠實現快速響應和精確控制。此外,伺服驅動器還具有多種報警保護功能,如過流保護、過熱保護、欠壓保護等,確保系統的安全運行。
伺服控制器:除了具有伺服驅動器的基本性能特點外,還具有更高的控制精度和更強的適應性。它能夠適應各種復雜的控制需求,并在惡劣環境下保持穩定運行。
四、總結
綜上所述,伺服驅動器和伺服控制器在功能定位、控制方式、應用場景和性能特點等方面存在明顯的區別。伺服驅動器主要負責對伺服電機進行精準控制,實現電機運動參數的精確調節;而伺服控制器則具有更廣泛的適用范圍和更強大的控制能力,能夠滿足各種復雜的控制需求。在實際應用中,需要根據具體的應用場景和需求選擇合適的組件,以確保系統的高效運行和穩定性。
-
變頻器
+關注
關注
251文章
6503瀏覽量
144235 -
伺服控制器
+關注
關注
2文章
86瀏覽量
18704 -
伺服放大器
+關注
關注
3文章
43瀏覽量
13909
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論