 PID控制器中P、I、D的含義
PID控制器中P、I、D的含義
一、引言
PID(Proportional-Integral-Derivative)控制器,作為工業自動化領域中最常用的控制算法之一,其廣泛應用于各種控制系統中,如溫度控制、流量控制、壓力控制等。PID控制器的核心在于通過調整比例(P)、積分(I)和微分(D)三個參數,實現對被控對象的精確控制。本文將詳細探討PID控制器中P、I、D的含義、作用及其在控制系統中的應用。
二、PID控制器概述
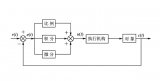
PID控制器是一種基于偏差的控制算法,它通過計算當前系統輸出與設定值之間的偏差,然后根據這個偏差來調整控制量,使系統輸出逐漸逼近設定值。PID控制器由比例環節(P)、積分環節(I)和微分環節(D)三個部分組成,每個部分都對控制效果起著重要的作用。
三、PID控制器中P、I、D的含義及作用
比例環節(P)
比例環節是PID控制器中最基本的部分,它根據系統偏差的大小直接調整控制量。偏差越大,控制量調整得越多;偏差越小,控制量調整得越少。比例環節的作用是快速響應系統偏差,使系統輸出能夠快速向設定值逼近。但是,僅僅依靠比例環節往往難以消除穩態誤差,因為當系統偏差接近于零時,比例環節的控制作用也會逐漸減弱,導致系統輸出無法穩定在設定值。
積分環節(I)
積分環節是為了消除穩態誤差而引入的。它通過對系統偏差進行積分運算,得出一個與偏差持續時間成正比的積分項,并將其加到控制量上。積分環節的作用是逐漸減小穩態誤差,使系統輸出穩定在設定值附近。但是,積分環節也可能導致系統響應變慢或產生積分飽和現象。積分飽和是指當系統偏差長時間保持在同一方向時,積分項會不斷累積增大,導致控制量過大或過小,從而使系統輸出產生過沖或欠沖現象。
微分環節(D)
微分環節是為了改善系統動態性能而引入的。它通過對系統偏差進行微分運算,得出一個與偏差變化率成正比的微分項,并將其加到控制量上。微分環節的作用是預測系統偏差的變化趨勢,提前調整控制量,從而加快系統響應速度并減小超調量。微分環節對于抑制系統振蕩、提高系統穩定性具有重要作用。但是,微分環節也可能放大高頻噪聲信號,對系統產生不利影響。
四、PID控制器中P、I、D參數的調整
在PID控制器的應用中,如何合理設置和調整P、I、D三個參數是一個關鍵問題。一般來說,參數調整應遵循以下原則:
比例系數Kp的選取:Kp的大小決定了系統響應速度和對偏差的敏感度。Kp過大可能導致系統超調或振蕩;Kp過小則可能導致系統響應過慢。因此,應根據系統特性和控制要求合理選取Kp的值。
積分系數Ki的選取:Ki的大小決定了系統消除穩態誤差的能力。Ki過大可能導致系統產生積分飽和現象;Ki過小則可能導致穩態誤差無法消除。因此,應根據系統穩態誤差的要求合理選取Ki的值。
微分系數Kd的選取:Kd的大小決定了系統對偏差變化率的敏感度。Kd過大可能導致系統對高頻噪聲信號過于敏感;Kd過小則可能導致系統響應速度變慢。因此,應根據系統動態性能的要求合理選取Kd的值。
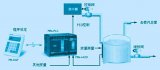
五、PID控制器的應用實例
PID控制器在工業自動化領域具有廣泛的應用。以溫度控制系統為例,通過PID控制器可以實現對溫度的精確控制。在溫度控制系統中,PID控制器根據當前溫度與設定溫度之間的偏差,調整加熱或制冷設備的輸出功率,使溫度逐漸逼近設定值。通過合理設置和調整P、I、D三個參數,可以使溫度控制系統具有較快的響應速度、較小的穩態誤差和較好的穩定性。
六、結論
PID控制器作為工業自動化領域中最常用的控制算法之一,其通過調整比例、積分和微分三個參數實現對被控對象的精確控制。本文詳細探討了PID控制器中P、I、D的含義及作用,并介紹了參數調整的原則和應用實例。在實際應用中,應根據系統特性和控制要求合理設置和調整PID控制器的參數以提高系統的性能。
-
PID控制器
+關注
關注
2文章
173瀏覽量
18563 -
工業自動化
+關注
關注
17文章
2313瀏覽量
67182
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論