 自動駕駛邁向3.0時代!車企爭搶城市無圖NOA,大模型端到端方案加速迭代
自動駕駛邁向3.0時代!車企爭搶城市無圖NOA,大模型端到端方案加速迭代
電子發燒友網報道(文/莫婷婷)汽車智能化推動了“軟件定義汽車”,自動駕駛也同步進入了由軟件驅動的2.0時代。發展至今,自動駕駛市場開始邁進3.0時代。那么,什么是自動駕駛3.0時代,在2.0時代向3.0時代的過渡階段,大模型又有哪些需求?
自動駕駛由2.0時代邁向3.0時代
回顧自動駕駛的發展,可以將其總結為三個發展階段,由硬件驅動轉向軟件驅動,如今轉向數據驅動,也就是業內所說的自動駕駛3.0時代。在硬件驅動的1.0時代,由激光雷達負責感知,到了軟件驅動的2.0時代,感知由傳感器單獨輸出結果,應用了部分小模型,數據量較少。如今在3.0時代,感知由多模態傳感器聯合輸出結果,數據的需求量越來越大,應用了越來越多的大模型。
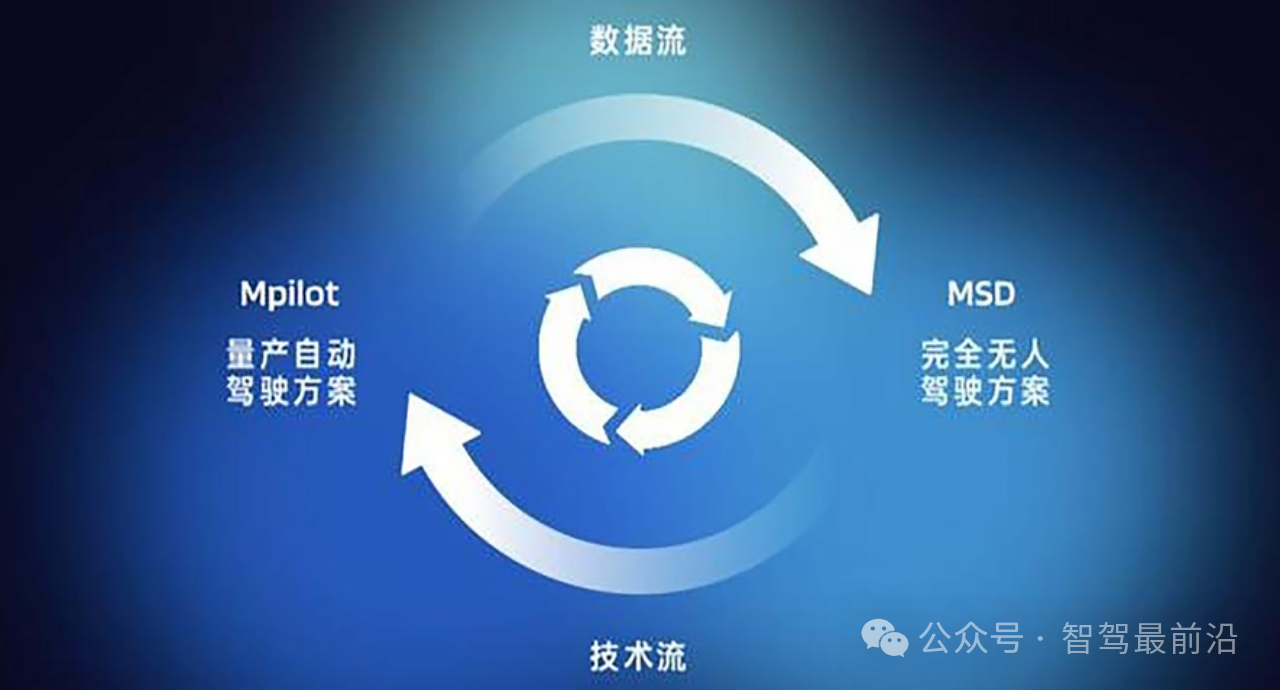
毫無疑問,大模型正在重塑汽車智能化技術路線,當前進入了自動駕駛2.0時代向3.0時代的技術架構演進的關鍵階段。毫末智行認為,在這個過程中,越來越多的分模塊出現集中化、模型化,也就是由多個模塊變成一個模型,由多個模型變成一個模型,最后會匯聚到這種端到端的大模型,通過端到端的大模型在車上或者在云上完成智能駕駛任務。
當前,有多家廠商發布了應用在汽車領域的大模型及其解決方案,例如毫末智行基于自身對技術發展的預判,發布了Drive GPT大模型,商湯絕影則發布了端到端自動駕駛解決方案UniAD等。
不同的企業對自動駕駛任務的定義是不同的。毫末智行將自動駕駛任務分成了兩個階段,一個是感知階段,另一個是認知階段。Drive GPT大模型在感知階段進行傳感器的多模態視覺融合,完成感知后,認知大模型再進行理解,認知模型除了輸入自動駕駛所需要的目的地、導航信息,還可以用基礎大語言模型,對駕駛環境做理解,從而對駕駛的策略進行預測。商湯絕影智能駕駛產品總監趙祥磊表示,Drive GPT還加入了圖片、文字等多模態模型,能夠更加高效、立體地理解、感知周圍的環境。
要知道,智能汽車在駕駛過程中面臨很多復雜的場景,例如能否根據道路的環境控制車速,讓行駛更安全。因此大模型需要更精準地完成檢測工作,這也就需要通過大量數據的訓練。
在云端完成感知大模型和認知大模型的能力提升之后,如何將其賦能至車端,是下一個階段需要突破的難題。
自動駕駛解決方案走向真端到端,由兩段式到一段式
目前,大模型上車已經迎來一定進展,并且隨著技術的成熟,NOA功能從高速NOA,卷向城市NOA,再到城市無圖NOA。2024年,正是城市無圖NOA落地的關鍵節點。
“圖”指的是高精度地圖,有圖意味著需要高精度地圖提供交通標志、紅綠燈等道路信息,并且要精確到厘米,讓車輛進行更加有效的路線規劃和智駕行為。但高精度地圖存在制作成本高、需要及時更新地圖信息、信息采集法規嚴格等問題。因此,城市無圖NOA已經成為下一階段的技術需求。更重要的是,城市無圖NOA還是大模型是否真的支持端到端的標志之一,這也是為什么在現階段大模型廠商經常提及“端到端”的原因。
在車企中,智己汽車發布的 D.L.P.(深度學習算法)人工智能模型,DDLD+DDOD融合感知大模型也已上車智己L6。智己汽車表示智己L6 Max全系具備無圖城市NOA能力。計劃在第一季度在上海地區率先推送城市NOA,第二季度開啟無圖城市NOA公測,第三季度量產無圖城市NOA,第四季度實現全國都可開無圖城市NOA。
10 年前的 ADAS 功能主要是識別車輛、行人和車道線,讓汽車居中行駛。隨著技術迭代,增加了響應紅綠燈的功能,再接下來,ADAS功能還需要識別更多復雜的道路信息,例如路上的施工區域,讓汽車能夠繞過障礙物更安全行駛。
商湯絕影智能駕駛產品線總監趙祥磊提及,后面我們發現它要的并不是找一個可通行的空間,而是要去理解這是一個施工的場景,可能需要去左轉、右轉甚至掉頭,這也是我們的理解,我們認為最終的端到端方案,它可能并不是一個感知和決策規劃兩段式的方案,真端到端應該是一段式的,這樣的話它的性能的天花板才會更高。
商湯絕影認為由感知和決策兩個模型組成的 “兩段式”架構的端到端方案比較容易落地,但存在性能上限瓶頸,因為中間信息的傳遞主要是人為的,會出現信息傳遞過濾或丟失的問題。
因此商湯絕影推出UniAD解決方案,公司表示這是真端到端的解決方案,實現了感知決策一體化。具備兩大優勢,一是性能上限更高,應對非結構化無圖道路和多交通參與者交互等復雜能力更強;二是迭代速度更快,針對復雜道路場景,相比于基于規則方案,開發效率提高數倍。目前已經完成實車部署開始路測。
商湯絕影采用了數據驅動、大模型驅動讓UniAD更高效地響應復雜道路場景。但是商湯絕影發現,當隨著時間周期越來越長,corner case出現概率也在降低,基于車輛采集的數據綜合效率逐漸降低。此時需要尋找新的數據驅動引擎。而AIGC的出現恰好能解決一部分問題,大模型能夠生成交通事故等長尾場景的數據,再進行訓練。
在毫末智行的自動駕駛技術路線中,也規劃了將在今年實現通用感知+通用認知,以及端到端訓練,打造感知+認知端到端。
當然,端到端的模型開發、基于大模型的數據生成,都是需要算力基礎設施作為支撐。算力基礎設備的算力規模或許會成為下一階段大模型廠商的競爭優勢。
-
自動駕駛
+關注
關注
783文章
13694瀏覽量
166166 -
大模型
+關注
關注
2文章
2339瀏覽量
2499
發布評論請先 登錄
相關推薦
從車企實踐看自動駕駛端到端解決方案

Waymo利用谷歌Gemini大模型,研發端到端自動駕駛系統
智己汽車“端到端”智駕方案推出,老司機真的會被取代嗎?


NVIDIA Research端到端自動駕駛模型引領國際挑戰賽
L4算法公司如何助力城市NOA加速落地?
城市NOA是評價智駕能力的唯一標準嗎?








 工商網監
工商網監
評論