 步進電機步進驅動器計算方法
步進電機步進驅動器計算方法
步進電機是一種將電脈沖信號轉換為機械角位移的執行元件,廣泛應用于自動化設備、機器人、打印機等領域。步進電機驅動器是步進電機的控制裝置,負責接收控制信號并驅動步進電機按照預定的步數和方向進行運動。本文將詳細介紹步進電機驅動器的計算方法。
- 步進電機的基本原理
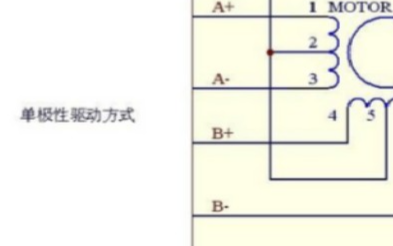
步進電機是一種電磁式電機,其工作原理是利用電磁力的作用使轉子產生角位移。步進電機主要由定子和轉子兩部分組成。定子上有多個繞組,通過改變繞組的電流方向和大小,產生不同的磁場,從而驅動轉子轉動。轉子上有多對磁極,與定子上的磁場相互作用,使轉子產生角位移。
步進電機的角位移與輸入的脈沖信號成正比,即每輸入一個脈沖信號,轉子就轉動一個步距角。步距角是步進電機的基本參數,通常以度為單位,如1.8度、0.9度等。
- 步進電機的分類
根據步距角的大小,步進電機可分為以下幾類:
- 大步距角步進電機:步距角在1.8度以上,如2.5度、3.3度等。
- 中步距角步進電機:步距角在1.8度以下,如1.5度、1.2度等。
- 小步距角步進電機:步距角在0.9度以下,如0.72度、0.36度等。
- 步進電機驅動器的基本原理
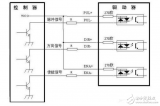
步進電機驅動器的主要功能是接收控制信號,根據控制信號的要求,對步進電機的繞組進行控制,從而實現步進電機的精確控制。步進電機驅動器的基本原理如下:
- 脈沖輸入:驅動器接收來自控制器的脈沖信號,脈沖信號的數量決定了步進電機轉動的步數。
- 方向控制:驅動器接收來自控制器的方向信號,方向信號決定了步進電機的轉動方向。
- 電流控制:驅動器根據步進電機的參數和控制要求,對繞組的電流進行控制,以實現步進電機的精確控制。
- 步進電機驅動器的計算方法
步進電機驅動器的計算主要包括以下幾個方面:
4.1 脈沖數的計算
脈沖數是控制步進電機轉動的基本參數,其計算公式為:
脈沖數 = 目標角位移 / 步距角
其中,目標角位移是步進電機需要轉動的角度,步距角是步進電機的基本參數。
例如,如果步進電機的步距角為1.8度,需要轉動90度,則脈沖數為:
脈沖數 = 90 / 1.8 = 50
4.2 電流的計算
步進電機的電流直接影響其輸出力矩和效率。電流的計算需要考慮步進電機的額定電流、最大電流和實際工作電流等因素。
電流的計算公式為:
實際電流 = 額定電流 × (實際負載 / 最大負載)
其中,額定電流是步進電機在正常工作條件下的電流,最大負載是步進電機在最大負載下的工作狀態。
例如,如果步進電機的額定電流為2A,最大負載為10Nm,實際負載為5Nm,則實際電流為:
實際電流 = 2 × (5 / 10) = 1A
4.3 驅動器功率的計算
驅動器的功率決定了其能夠驅動步進電機的能力。驅動器功率的計算公式為:
功率 = 電流 × 電壓
其中,電流是步進電機的實際工作電流,電壓是驅動器的輸入電壓。
例如,如果步進電機的實際電流為1A,驅動器的輸入電壓為24V,則驅動器的功率為:
功率 = 1 × 24 = 24W
4.4 驅動器的選型
根據步進電機的參數和實際工作要求,選擇合適的驅動器。驅動器的選型需要考慮以下幾個方面:
- 驅動能力:驅動器的驅動能力應滿足步進電機的額定電流和最大電流要求。
- 控制方式:驅動器的控制方式應與控制器的輸出方式相匹配,如脈沖+方向、模擬信號等。
- 接口類型:驅動器的接口類型應與控制器的接口類型相匹配,如并口、串口等。
- 尺寸和安裝方式:驅動器的尺寸和安裝方式應滿足實際應用的需求。
- 結論
步進電機驅動器的計算方法主要包括脈沖數的計算、電流的計算、驅動器功率的計算和驅動器的選型。在實際應用中,需要根據步進電機的參數和實際工作要求,進行合理的計算。
-
驅動器
+關注
關注
52文章
8168瀏覽量
146052 -
機械
+關注
關注
8文章
1538瀏覽量
40472 -
打印機
+關注
關注
10文章
763瀏覽量
45588 -
步進電機
+關注
關注
150文章
3097瀏覽量
147357
發布評論請先 登錄
相關推薦
步進電機特性是什么?步距角計算方法有哪幾種
步進電機及驅動器連接_步進電機驅動器接法_步進電機驅動器怎么調






 工商網監
工商網監
評論