 plc如何控制伺服電機的速度和方向?
plc如何控制伺服電機的速度和方向?
PLC(可編程邏輯控制器)是一種廣泛應用于工業自動化領域的控制設備。伺服電機是一種高精度、高響應速度的電機,廣泛應用于各種自動化設備中。本文將詳細介紹PLC如何控制伺服電機的速度和方向。
- 伺服電機的基本原理
伺服電機是一種閉環控制系統,其工作原理是通過檢測電機的實際位置、速度等信息,與給定的指令值進行比較,然后根據偏差值來調整電機的運行狀態,以實現精確控制。伺服電機主要由電機、編碼器、驅動器等部分組成。
- PLC與伺服電機的連接方式
PLC與伺服電機的連接通常采用以下幾種方式:
(1)模擬信號連接:PLC通過模擬輸出模塊(如DA模塊)輸出模擬信號,驅動器接收模擬信號并將其轉換為電機的運行指令。
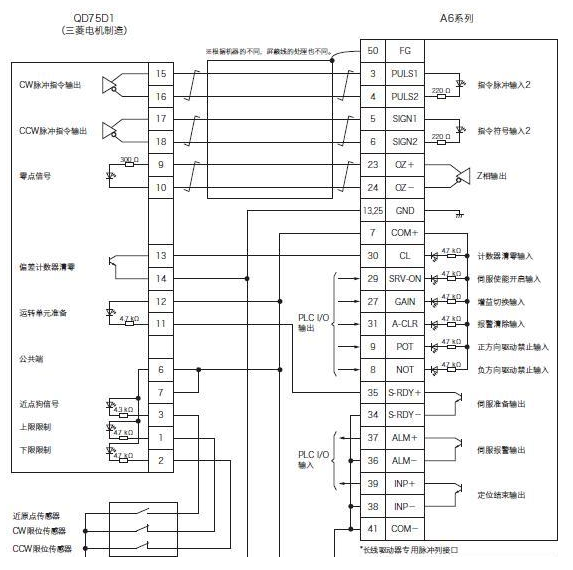
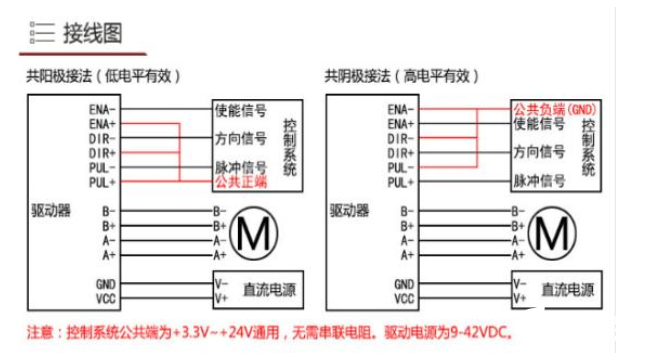
(2)脈沖信號連接:PLC通過脈沖輸出模塊(如PWM模塊)輸出脈沖信號,驅動器接收脈沖信號并根據脈沖的頻率和方向來控制電機的速度和方向。
(3)通信連接:PLC通過通信接口(如RS485、CAN等)與驅動器進行通信,實現對電機的控制。
- PLC控制伺服電機的速度
PLC控制伺服電機的速度主要有以下幾種方式:
(1)模擬信號控制:PLC通過模擬輸出模塊輸出0-10V或4-20mA的模擬信號,驅動器根據模擬信號的大小來調整電機的速度。這種方式的優點是控制精度較高,但容易受到干擾。
(2)脈沖信號控制:PLC通過脈沖輸出模塊輸出脈沖信號,驅動器根據脈沖的頻率來調整電機的速度。脈沖信號的頻率越高,電機的速度越快。這種方式的優點是抗干擾能力強,但控制精度相對較低。
(3)通信控制:PLC通過通信接口與驅動器進行通信,發送速度指令來控制電機的速度。這種方式的優點是可以實時調整速度,控制精度高,但需要驅動器支持相應的通信協議。
- PLC控制伺服電機的方向
PLC控制伺服電機的方向主要有以下幾種方式:
(1)模擬信號控制:PLC通過模擬輸出模塊輸出正負電壓信號,驅動器根據電壓的正負來控制電機的正反轉。
(2)脈沖信號控制:PLC通過脈沖輸出模塊輸出脈沖信號,驅動器根據脈沖的相位來控制電機的正反轉。通常,PLC輸出兩路脈沖信號,一路控制速度,另一路控制方向。
(3)通信控制:PLC通過通信接口與驅動器進行通信,發送方向指令來控制電機的正反轉。
- PLC與伺服電機的控制策略
PLC與伺服電機的控制策略主要包括以下幾種:
(1)點位控制:PLC根據給定的位置指令,控制電機運行到指定位置。這種方式適用于簡單的定位控制。
(2)速度控制:PLC根據給定的速度指令,控制電機以恒定速度運行。這種方式適用于需要恒速運行的場合。
(3)加減速控制:PLC根據給定的加速度和減速度指令,控制電機進行加速和減速。這種方式適用于需要平滑啟動和停止的場合。
(4)軌跡控制:PLC根據給定的軌跡指令,控制電機按照預定軌跡運行。這種方式適用于復雜的運動控制。
- PLC與伺服電機的調試方法
PLC與伺服電機的調試主要包括以下幾個步驟:
(1)硬件連接:根據PLC和伺服電機的接口類型,進行相應的硬件連接。
(2)參數設置:根據電機和驅動器的技術參數,設置PLC和驅動器的相關參數,如脈沖當量、控制方式等。
(3)程序編寫:根據控制要求,編寫PLC控制程序,實現對伺服電機的控制。
(4)調試運行:在實際應用中,對PLC和伺服電機進行調試,觀察電機的運行狀態,調整參數,直至滿足控制要求。
PLC控制伺服電機是一種常見的工業自動化應用。通過選擇合適的連接方式、控制策略和調試方法,可以實現對伺服電機的速度和方向的精確控制,滿足各種自動化設備的需求。隨著工業自動化技術的不斷發展,PLC與伺服電機的控制技術將更加成熟和完善。
-
控制系統
+關注
關注
41文章
6550瀏覽量
110498 -
plc
+關注
關注
5008文章
13167瀏覽量
462188 -
伺服電機
+關注
關注
85文章
2030瀏覽量
57723 -
工業自動化
+關注
關注
17文章
2313瀏覽量
67183
發布評論請先 登錄
相關推薦
plc如何控制步進電機的速度和方向?
plc如何控制步進電機的速度和方向?






 工商網監
工商網監
評論