 汽車上can高和can低都是多少伏
汽車上can高和can低都是多少伏
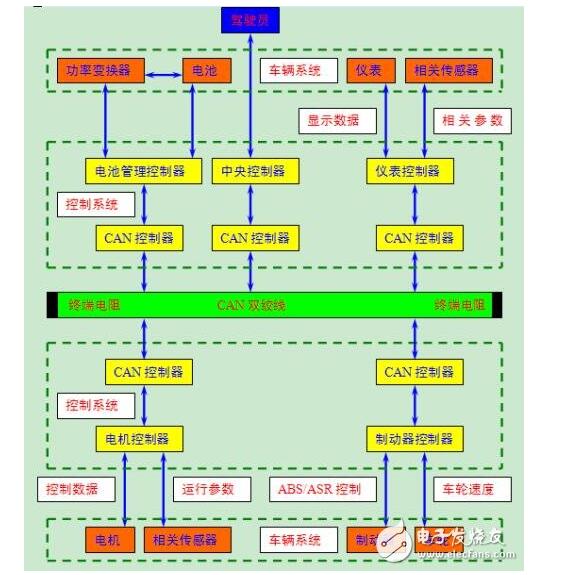
CAN(Controller Area Network,控制器局域網)是一種用于汽車和其他工業應用的通信協議。CAN總線使用一對雙絞線(CANH和CANL)來傳輸數據,其中CANH通常被稱為“CAN高”,CANL被稱為“CAN低”。
- CAN總線電壓概述
CAN總線是一種差分信號傳輸方式,其電壓水平取決于CANH和CANL之間的電壓差。在CAN通信中,電壓差決定了信號的邏輯狀態。通常,CAN總線電壓分為兩個邏輯狀態:邏輯0(顯性)和邏輯1(隱性)。
- CAN總線電壓標準
CAN總線有兩種電壓標準:CAN 2.0A和CAN 2.0B。這兩種標準在電壓水平上有所不同。
2.1 CAN 2.0A
CAN 2.0A標準規定了兩種電壓范圍:高速CAN(HSC)和低速CAN(LSC)。
- 高速CAN(HSC):CANH在2.5V至5V之間,CANL在0V至1.5V之間。
- 低速CAN(LSC):CANH在2.5V至5V之間,CANL在0V至0.5V之間。
2.2 CAN 2.0B
CAN 2.0B標準規定了一種電壓范圍,適用于所有CAN通信。
- CAN 2.0B:CANH在2.5V至5V之間,CANL在0V至0.5V之間。
- CAN總線電壓邏輯狀態
在CAN總線通信中,邏輯0(顯性)和邏輯1(隱性)的電壓差決定了數據的傳輸。
3.1 邏輯0(顯性)
當CANH低于CANL時,表示邏輯0(顯性)。在這種情況下,CANH的電壓范圍通常在0V至0.5V之間,而CANL的電壓范圍在2.5V至5V之間。
3.2 邏輯1(隱性)
當CANH高于CANL時,表示邏輯1(隱性)。在這種情況下,CANH的電壓范圍通常在3.5V至5V之間,而CANL的電壓范圍在0V至0.5V之間。
- CAN總線電壓穩定性
為了保證CAN總線通信的穩定性,需要確保CANH和CANL之間的電壓差保持在一定的范圍內。這通常通過使用終端電阻來實現。終端電阻通常連接在CANH和CANL的兩端,以減少信號反射和提高信號質量。
- CAN總線電壓抗干擾能力
CAN總線具有較強的抗干擾能力,這主要得益于其差分信號傳輸方式。差分信號傳輸可以有效地抵抗外部電磁干擾,提高通信的可靠性。
- CAN總線電壓與通信速率
CAN總線的通信速率(波特率)與電壓水平有關。在高速CAN通信中,電壓差較大,信號傳輸速度較快。而在低速CAN通信中,電壓差較小,信號傳輸速度較慢。
- CAN總線電壓與電源
CAN總線的電源通常為5V或12V。在實際應用中,需要根據CAN總線設備的要求選擇合適的電源。同時,還需要考慮電源的穩定性和抗干擾能力,以保證CAN總線通信的可靠性。
- CAN總線電壓測量與調試
在CAN總線系統的調試過程中,需要測量CANH和CANL之間的電壓差,以確保通信正常。可以使用示波器或邏輯分析儀等工具來測量CAN總線電壓,并根據測量結果調整系統參數。
- CAN總線電壓故障診斷
當CAN總線通信出現問題時,可能與電壓有關。例如,電壓差過小可能導致信號不穩定,而電壓差過大可能導致設備損壞。因此,在故障診斷過程中,需要檢查CANH和CANL之間的電壓差,并根據需要進行調整。
- 結論
CAN總線作為一種廣泛應用于汽車和其他工業領域的通信協議,其電壓水平對于通信的穩定性和可靠性至關重要。了解CAN高和CAN低的電壓標準、邏輯狀態、穩定性、抗干擾能力等方面的知識,有助于在實際應用中更好地設計、調試和維護CAN總線系統。
-
通信協議
+關注
關注
28文章
858瀏覽量
40268 -
CAN
+關注
關注
57文章
2719瀏覽量
463377 -
局域網
+關注
關注
5文章
747瀏覽量
46243 -
差分信號
+關注
關注
3文章
367瀏覽量
27654
發布評論請先 登錄
相關推薦
一個典型的CAN應用場景 CAN總線是如何解決多點競爭的問題?


汽車CAN總線,跪求指教!
接收CAN公共汽車上數據包的代碼
一文看懂汽車CAN總線技術原理
CAN總線如何讀取新能源汽車中的CAN信號
汽車CAN總線,由誰主刀
允許在Terps Racing EV22賽車上進行 CAN通信的CAN屏蔽






 工商網監
工商網監
評論