 H橋電機驅動電路電路圖 H橋電機驅動電路的工作原理和控制方式
H橋電機驅動電路電路圖 H橋電機驅動電路的工作原理和控制方式
H橋電機驅動電路是一種廣泛應用于電機控制領域的電子電路,其名稱來源于其形狀類似于英文字母“H”的電路布局。H橋電路主要用于控制直流電機(包括有刷直流電機、步進電機和伺服電機等)的正反轉、調速以及制動等操作。下面將對H橋電機驅動電路進行詳細的介紹,內容分為多個部分進行闡述。
一、H橋電機驅動電路的基本結構與組成
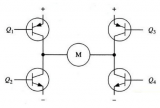
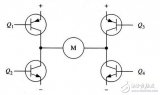
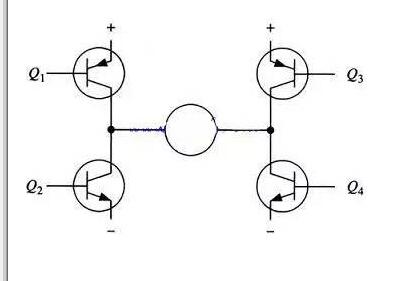
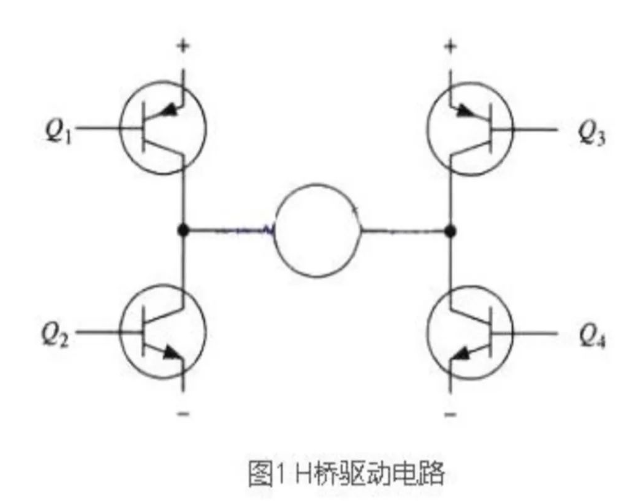
H橋電機驅動電路得名于其電路形狀酷似英文字母“H”。該電路主要由四個開關器件(如MOS管、晶體管或繼電器等)構成,這四個開關器件被分為兩組,每組兩個,分別連接在電機的兩端。在電路中,電機作為負載位于兩個并聯支路之間,構成了形如“H”的電路結構。
具體來說,這四個開關器件在H橋電路中通常被標記為Q1、Q2、Q3和Q4。其中,Q1和Q4位于H橋的一側,而Q2和Q3位于另一側。這四個開關器件的通斷狀態直接決定了電機的轉動方向、速度和制動。
二、H橋電機驅動電路的工作原理
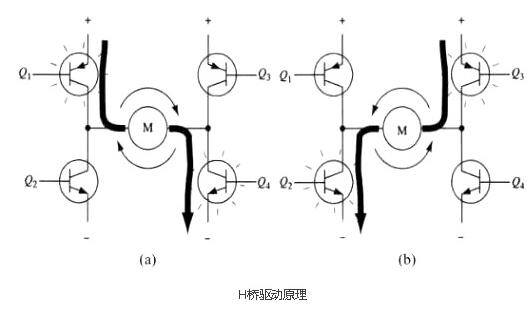
H橋電機驅動電路的工作原理基于改變電機兩端電流的方向來實現電機的正反轉、調速和制動。以下是具體的工作原理分析:
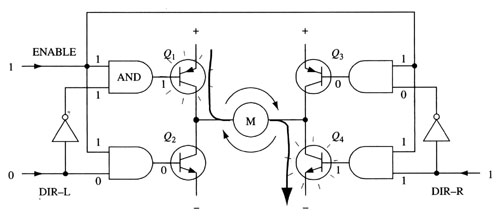
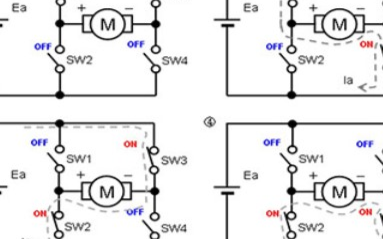
正向轉動:
當需要電機正向轉動時,控制Q1和Q4導通(即閉合),同時Q2和Q3斷開(即打開)。
此時,電流從電源正極經過Q1流向電機的一端,再從電機的另一端經過Q4回到電源負極,形成正向電流。
在這個過程中,電機內部的磁場與電流方向相同,根據安培定則,電機將按照預定的方向旋轉。
反向轉動:
當需要電機反向轉動時,控制Q2和Q3導通,同時Q1和Q4斷開。
此時,電流從電源正極經過Q2流向電機的另一端,再從電機的一端經過Q3回到電源負極,形成反向電流。
在這個過程中,電機內部的磁場與電流方向相反,根據安培定則,電機將反向旋轉。
調速:
H橋電機驅動電路可以通過調整開關器件的通斷時間(即占空比)來實現電機的調速。
當使用PWM(脈寬調制)信號控制開關器件時,可以通過改變PWM信號的占空比來改變電機兩端的平均電壓,進而改變電機的轉速。
占空比越大,電機兩端的平均電壓越高,電機轉速越快;占空比越小,電機兩端的平均電壓越低,電機轉速越慢。
制動:
當需要電機快速停止時,可以同時關閉所有開關器件(即Q1、Q2、Q3和Q4都斷開)。
此時,電機兩端的電流被切斷,電機內部的磁場迅速消失,電機將迅速停止轉動。
另外,也可以通過使對角線上的兩個開關器件(如Q1和Q3或Q2和Q4)同時導通,將電機兩端短路,形成電機制動狀態,使電機迅速停止轉動。
三、H橋電機驅動電路的特點與應用
H橋電機驅動電路具有以下特點:
控制靈活:通過控制四個開關器件的通斷狀態,可以實現對電機的正反轉、調速和制動等多種控制。
效率高:由于H橋電路直接控制電機的電流方向,因此具有較高的能量轉換效率。
可靠性高:采用成熟的半導體開關器件和電路設計,具有較高的可靠性和穩定性。
H橋電機驅動電路廣泛應用于各種需要精確控制電機轉動方向和速度的場合,如工業機器人、無人駕駛汽車、無人機、傳送帶、起重設備等。在這些應用中,H橋電機驅動電路為電機提供了穩定可靠的動力支持,實現了對電機的高效控制。
四、H橋電機驅動電路圖
1、基于 IC L293D 的 H 橋電機驅動電路圖
簡單且使用最廣泛的 H 橋電機驅動電路,使用 L293D 繪制在原理圖和 PCB 中,我們知道 H 橋是一個切換施加到負載的電壓極性的電路(這里負載是電機),因此我們可以改變電機的旋轉方向。
這里,H 橋電機驅動器協調負載電機的電源和信號并相應地驅動它。德州儀器 (TI) 的 IC L293D 是一款四路高電流半 H 驅動器。 L293D 能夠在 4.5V 至 36V 電壓范圍內提供高達 600mA 的雙向驅動電流。該 IC 可以驅動感性負載,例如電機、繼電器、螺線管和雙極步進電機。
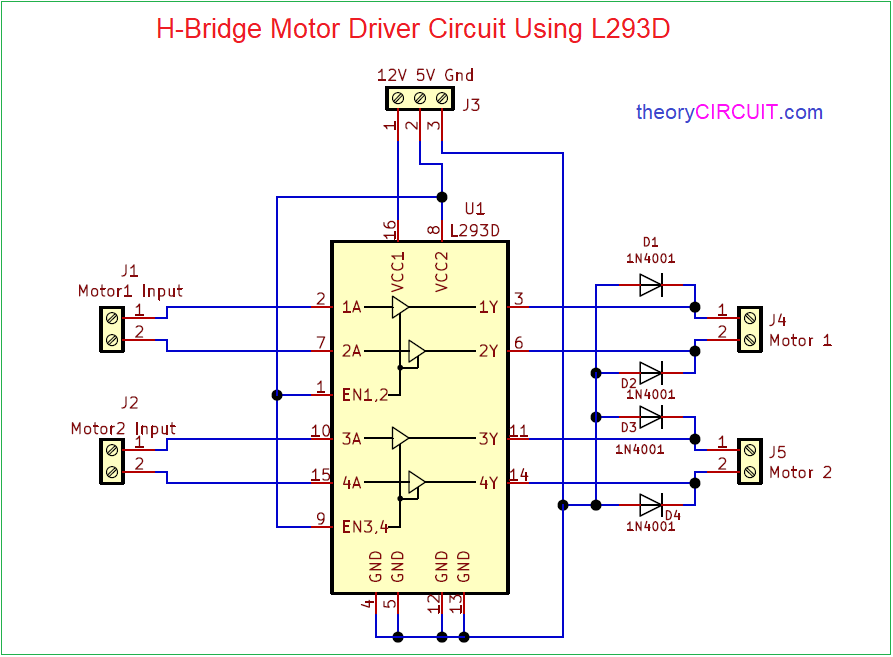
該 IC L293D 采用 16 引腳 PDIP 封裝。它具有內部 ESD 保護、高抗噪輸入和 4.5V 至 36V 的寬電源電壓范圍。這種采用L293D的H橋電機驅動電路原理圖和PCB設計非常簡單,外部元件只有四個二極管。
該電機驅動電路設計用于使用兩個輸入驅動兩個獨立的電機。電機 1 輸入信號施加到 L293D 的 1A、2A 引腳,電機 1 輸出取自 1Y、2Y 引腳。電機 2 輸入信號施加到 L293D 的 3A、4A 引腳,電機 2 輸出取自 3Y、4Y 引腳。這里 D1 – D4 二極管用作電機的反向電壓保護。
2、使用兩個 555 定時器 IC 的 H 橋電路驅動電路圖
H 橋是一種允許電流在負載上雙向流動的電路。這些電路經常用于機器人技術,以允許直流電機向前和向后運行。 H橋電路主要包含4個晶體管,用于雙向驅動電機。
我們將向您展示如何使用兩個 555 定時器 IC 制作 H 橋電路。 555定時器可用作電流源或電流吸收器。它還可以驅動額定電流高達200mA的負載,這足以驅動小型直流電機。
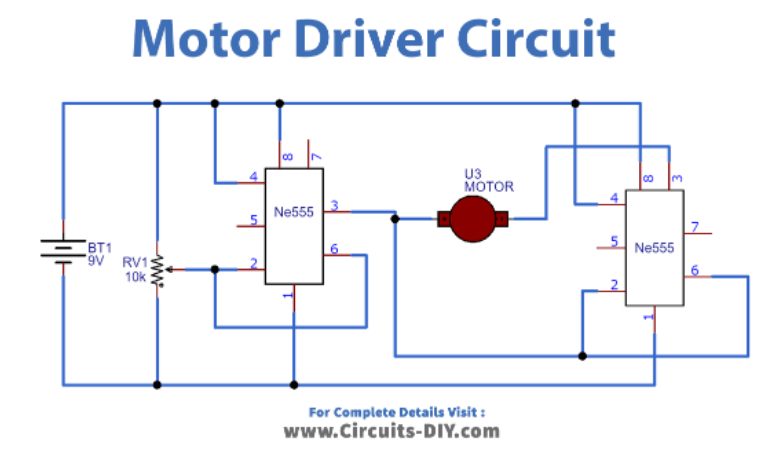
對于該電路,我們將使用兩個 555 定時器 IC。兩個 IC 的輸出將連接到電機的單獨端子。其中一個 IC 將向前驅動電機,另一個 IC 將向后驅動電機。電機的方向可以通過電位器來控制。當我們向一個方向移動電位器的旋鈕時,直流電機沿一個方向旋轉,當我們沿相反方向移動旋鈕時,電機也沿相反方向旋轉。通過移動電位計的旋鈕,我們將改變 IC 引腳 2 和引腳 6 之間的電阻。
利用兩個 555 定時器 IC 的 H 橋電機驅動電路圖
在電子電路中,H 橋的使用很常見。幾乎所有其他電路都在許多應用中采用 H 橋。一般來說,H 橋是一種電子電路,可以在其中雙向施加電壓。然而,H 橋電路通常適用于高級機械、機器人、功率性能電路等。
然而,該電路主要用于直流電機的運行。盡管如此,平均直流電壓可以施加在任一軸承上,以使直流電機向前或向后旋轉。隨后,直流電機進一步向前或向后移動機器人或任何電機驅動的系統。
這里制作的 H 橋可以利用兩個 555 定時器 IC 來制作。 555定時器IC是電子硬件中的一個非凡的部分;它很好地可以用作電流源,也可以用作電流接收器。此外,555定時器IC再次可以驅動高達200mA的電流,這足以驅動小型直流發動機。
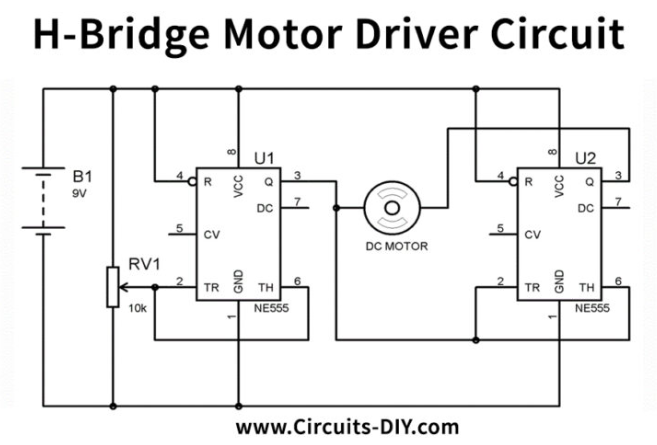
按照上述 H 橋電機驅動電路原理圖所示的方式關聯電路。當我們向一個方向移動 10k 電位器時,直流電機會朝一個方向旋轉,而當我們將電位器移動到反向時,直流電機也會反向轉動。
然而,當我們以一種方式移動電位器時,觸發引腳 2 處的電壓會低于 Vcc/3,這是 555 IC 內部下比較器的同相輸入。此后,這將設置觸發器的輸出,并且 555 繼續作為電流源,而另一個 555 則充當電流吸收器。因此,直流發動機在一個方向上旋轉轉動。
當我們反向移動 Pot 時,閾值 PIN 6 處的電壓超過 2/3Vcc,這是 555 IC 內部比較器的同相輸入。因此,這會重置觸發器的輸出,并且 555 繼續充當電流吸收器,同時另一個 555 充當電流源,從而使直流引擎反向旋轉。
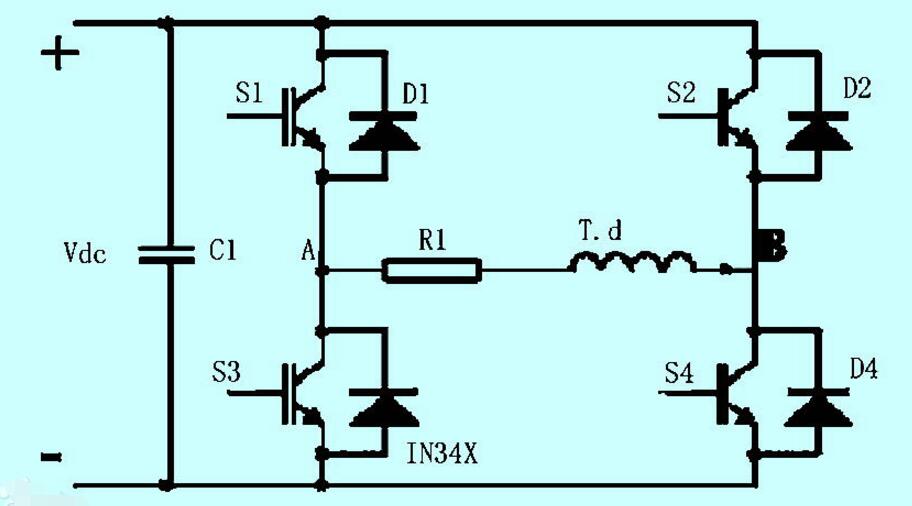
4、使用 MOSFET 的 H 橋電機驅動電路圖
在本教程中,我們將使用 MOSFET制作一個簡單的 H 橋電機驅動電路。 H 橋是一種配置為控制有刷直流電機的速度和方向的電路。 H橋電機驅動電路的便利之處在于低電流數字信號控制高電流電機。
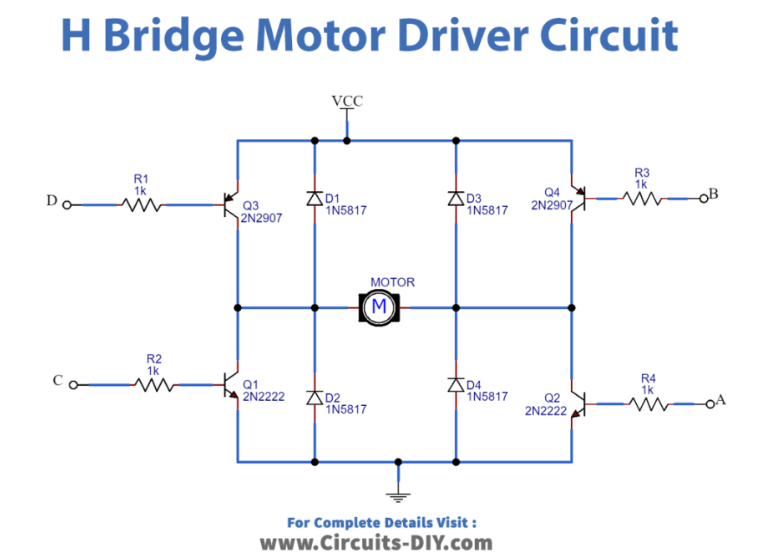
在電路中,我們看到電機周圍的 4 個 MOSFET 形成“H”形狀。 MOSFET 用作開關并以對角線對形式激活。二極管 D1 至 D4 為來自電機的反電動勢提供更安全的路徑。從而保護相應的 MOSFET 免受損壞。
該電路的工作原理非常容易理解。當D端接地且A連接至+Vcc時,晶體管Q1和Q4將導通,電流從左向右流過電機。當B端接地、C端接+Vcc時,三極管Q3、Q2導通,電流從右到右流過電機,導致電機反方向旋轉。
H橋電機驅動電路的控制方式是電機控制領域中的關鍵部分,它決定了電機如何響應并執行所需的動作。以下是對H橋電機驅動電路控制方式的詳細闡述,包括其原理、分類、特點以及應用場景,力求內容清晰、詳細且結構分明。
五、H橋電機驅動電路的控制方式
H橋電機驅動電路的控制方式主要通過調節開關器件(如MOS管、晶體管等)的通斷狀態,來控制電機兩端的電流方向和大小,進而實現對電機的正反轉、調速和制動等操作。其控制方式多種多樣,下面將逐一進行介紹。
1、開關控制
開關控制是最簡單直接的控制方式,通過直接控制H橋電路中開關器件的通斷狀態,來實現電機的正反轉和停止。例如,當需要電機正向轉動時,可以閉合Q1和Q4兩個開關,斷開Q2和Q3;當需要電機反向轉動時,則閉合Q2和Q3,斷開Q1和Q4。這種控制方式簡單易懂,但無法實現電機的平滑調速和精確控制。
2、PWM(脈寬調制)控制
PWM控制是H橋電機驅動電路中常用的控制方式之一,它通過改變PWM信號的占空比來調節電機兩端的平均電壓,從而實現對電機轉速的精確控制。具體來說,PWM信號由一系列高電平和低電平組成的方波構成,通過改變方波中高電平與整個周期的比例(即占空比),可以控制電機兩端的平均電壓大小。當占空比增加時,電機兩端的平均電壓增大,電機轉速提高;當占空比減小時,電機兩端的平均電壓減小,電機轉速降低。PWM控制具有響應速度快、調速范圍廣、控制精度高等優點,廣泛應用于需要精確控制電機轉速的場合。
在PWM控制中,PWM信號的頻率也是一個重要的參數。一般來說,PWM信號的頻率越高,電機轉速的調節越平滑;但過高的頻率會增加開關器件的損耗和發熱量。因此,在實際應用中需要根據具體情況選擇合適的PWM信號頻率。
3、電流控制
電流控制是通過檢測電機電流并實時調整開關器件的通斷狀態,使電機電流保持在設定值附近的一種控制方式。在H橋電機驅動電路中,可以通過在電機兩端串聯電流傳感器來檢測電機電流,并根據檢測到的電流值調整PWM信號的占空比或開關器件的通斷狀態。電流控制具有響應速度快、控制精度高等優點,特別適用于需要精確控制電機轉矩的場合。但電流控制也需要考慮到開關器件的承受能力和電路的復雜度等問題。
4、傳感器反饋控制
傳感器反饋控制是一種基于閉環原理的控制方式,它通過在電機上安裝傳感器(如編碼器、霍爾傳感器等)來實時監測電機的轉速、位置等狀態信息,并將這些信息反饋到控制器中。控制器根據反饋信息實時調整開關器件的通斷狀態或PWM信號的占空比等參數,使電機按照預定的軌跡和速度運行。傳感器反饋控制具有控制精度高、穩定性好等優點,特別適用于對電機控制精度要求較高的場合。但傳感器反饋控制也需要考慮到傳感器的安裝位置、精度和成本等問題。
不同的控制方式具有不同的特點和適用場景。開關控制簡單直接但控制精度低;PWM控制具有響應速度快、調速范圍廣等優點但需要考慮PWM信號的頻率和開關器件的損耗;電流控制精度高但需要考慮開關器件的承受能力和電路的復雜度;傳感器反饋控制控制精度高但需要考慮傳感器的安裝位置和成本等問題。在實際應用中需要根據具體需求和場景選擇合適的控制方式或多種控制方式的組合。
-
電路圖
+關注
關注
10285文章
10707瀏覽量
522886 -
MOS管
+關注
關注
108文章
2298瀏覽量
65585 -
驅動電路
+關注
關注
152文章
1502瀏覽量
108010 -
H橋電機
+關注
關注
1文章
16瀏覽量
1110
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論