 愛普生IMU產品在激光雷達測繪中的應用
愛普生IMU產品在激光雷達測繪中的應用
隨著雷達應用的快速發展,激光雷達測繪技術也迅速發展,它集成了激光測距系統、全球定位系統(GPS)和慣性導航系統三種技術于一體。其中激光雷達通過發射掃描激光,并檢測激光反射,從而測量反射物到激光雷達的距離。在知道自身三維空間坐標系和激光掃描方向的情況下,能夠實時獲取測量系統周圍的高分辨率的三維空間信息。
該技術搭載于無人機上,被廣泛應用于電力巡線、地形勘探、礦山測量等領域。
為什么需要慣性測量單元(IMU)
首先,慣性導航系統中一般具有慣性測量單元(IMU),可以用來精確測量出激光雷達自身的姿態數據,從而計算出激光雷達的掃描方向。
其次,在測量過程當中,通常由衛星系統(BDS/GPS/GLONASS/GALILEO)+慣導系統來實現測量激光雷達自身的空間坐標。但是,衛星系統在某些地方沒有信號(如隧道),且衛星系統位置信號相對來說是慢速信號,解算位置信息需要更快速的坐標信息更新,因此需要慣性測量單元(IMU)每秒來提供更多位置信息。

慣性測量單元(IMU)對精度的影響
激光雷達測繪設備的指標包含了:系統參數指標,激光雷達單元指標、慣導系統指標等單元。慣性測量單元(IMU)精度決定了姿態和位置精度,因此直接影響系統精度。采用愛普生的M-G370,經過后處理,激光測繪雷達的慣導系統精度可以達到:
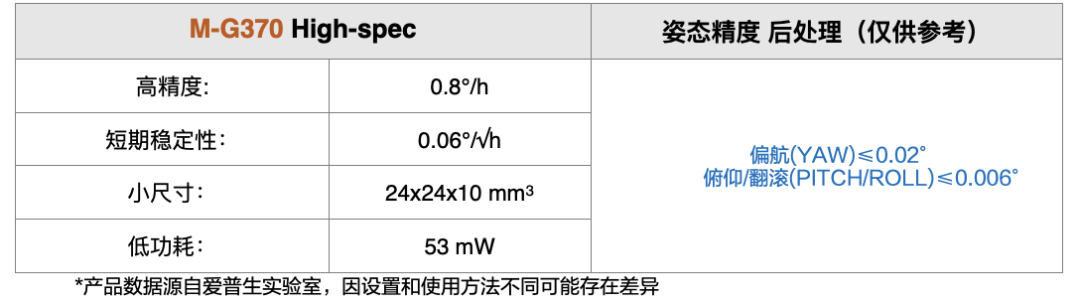
除了高精度,愛普生的慣性測量單元(IMU)還具有體積小、重量輕、功耗低的特點,有助于客戶應用的小型化和輕型化的要求;并且產品設計能硬件和軟件兼容,性能更穩定,也便于客戶維護升級。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
愛普生
+關注
關注
0文章
304瀏覽量
22120 -
激光雷達
+關注
關注
967文章
3938瀏覽量
189593 -
IMU
+關注
關注
6文章
298瀏覽量
45673
發布評論請先 登錄
相關推薦
激光雷達在安防監控中的優勢
在現代安防監控系統中,技術的進步不斷推動著監控手段的革新。激光雷達(LiDAR)作為一種高精度的遙感技術,近年來在安防監控領域展現出了巨大的潛力。 1. 高精度測距能力
激光雷達在農業中的創新應用
在現代農業中,技術的進步正在改變我們種植、管理和收獲作物的方式。激光雷達(LiDAR)技術,作為一種高精度的遙感技術,已經成為這一變革的關鍵驅動力。 1. 作物監測與管理 激光雷達技術
如何提升激光雷達數據的精度
、航空測繪、環境監測等領域。提升激光雷達數據的精度對于提高這些應用的性能至關重要。以下是一些提升激光雷達數據精度的方法: 硬件優化 : 激光發射器 :使用更高功率的
激光雷達在城市規劃中的應用
Detection and Ranging,簡稱LiDAR)技術作為一種先進的遙感技術,為城市規劃提供了一種全新的數據獲取方式。 1. 高精度地形測繪 激光雷達技術能夠提供高精度的地形數據,這對于城市規劃至關重要。傳統的地形測繪
激光雷達在無人機中的應用實例
,激光雷達技術因其高精度、高分辨率和強大的穿透能力而成為無人機的關鍵傳感器之一。 1. 測繪與地理信息系統(GIS) 在測繪領域,無人機搭載的激光雷
激光雷達在地形測繪中的作用
在地形測繪領域,精確和高效的數據獲取一直是工程師和科學家們追求的目標。隨著科技的進步,激光雷達(LiDAR)技術應運而生,為地形測繪帶來了革命性的變化。 一、
激光雷達技術的發展趨勢
激光雷達(LiDAR,Light Detection and Ranging)技術是一種通過發射激光脈沖并接收其反射來測量距離和速度的遙感技術。它在多個領域,如測繪、環境監測、自動駕駛汽車和無人機等
激光雷達在自動駕駛中的應用
自動駕駛技術正逐漸改變我們的出行方式,而激光雷達(LiDAR)作為實現這一技術的關鍵傳感器之一,其重要性不言而喻。激光雷達通過發射激光脈沖并接收反射回來的光,能夠精確測量車輛與周圍物體之間的距離,為
愛普生M-G330PDG0慣性測量模塊選型
),它結合了高精度、小巧輕便、寬溫度工作范圍和低功耗設計,使其成為現代科技設備不可或缺的核心組件,愛普生官方推薦的應用場景是激光雷達測繪和穩定云臺/動中通天線。當

TS高速數字化儀在激光雷達系統中的應用
一、基本介紹 50多年前,激光技術的發展催生了激光雷達 (LIDAR) 系統,該系統在距離計算方式上取得了突破。激光雷達的原理與雷達所使用的
商用激光雷達產品InnovizOne有什么獨特之處
Innoviz 是汽車行業的知名激光雷達制造商,率先開創了激光雷達感知技術。結合攝像頭和雷達等其他傳感器,Innoviz 能實現真正可脫手、解放雙眼的自動駕駛體驗。安森美 (onsemi)與 Innoviz 合作,助其推出了首款
晶振在激光雷達系統中的作用有哪些
激光雷達系統需要用精確的時間測量來計算距離和生成高分辨率的3D圖像。晶振在激光雷達系統中起著關鍵作用,主要用于提供穩定的時鐘信號和高精度的時間基準。
什么是激光雷達?激光雷達的構成與分類
所謂雷達,就是用電磁波探測目標的電子設備。激光雷達(LightDetectionAndRanging,簡稱"LiDAR"),顧名思義就是以激光來探測目標的雷達。






 工商網監
工商網監
評論