 3D三維掃描儀的光學測量技術知識
3D三維掃描儀的光學測量技術知識
從古老三角法到現代高精尖掃描儀
當我們對對物體進行三維測量時,一個非常重要的話題,便是如何捕捉被測點的空間三維坐標信息,而比較常用的方法就是三角測量法。人類對于三角測量法的應用由來已久,早在古埃及時期人們就已經使用三角測量法來進行測繪。而三本精密儀器的三維掃描儀,作為一類常見的光學測量儀器,其應用的主要測量方法即三角測量法。
三角測量的實現
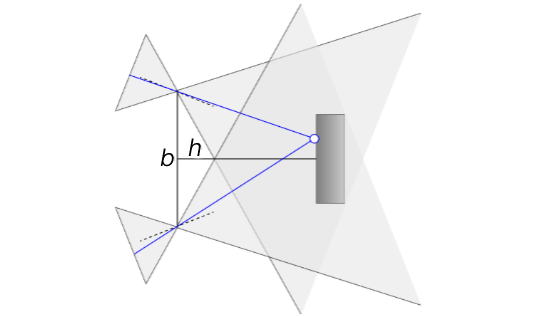
三角測量的基本構成要素分為測站,觀測角和測站間距,根據三角形的基本性質即可計算出被測物體的距離。而在三維掃描儀中,三角測量由多個視圖來完成,由多個相機中的照片來構成觀測站,由對掃描儀的標定獲得相機間距和夾角,從而構成三角計算的基本要素。那么接下來的問題就是在多視圖的三角計算中,如何確定照片中哪個點是來自于物體表面上同一個位置的,即多視圖中的同源點。為了克服這一問題,也就此發展出了各種不同的方法來實現對物體表面的“編碼”過程。目前常見的兩種方法即為面結構光掃描和線激光掃描。
面結構光掃描:精密的“光柵編織者”
面結構光掃描儀使用投射出來的光柵條紋來對所投射光線范圍內的物體表面進行編碼。常用的編碼方法有,格雷碼,相移法,外差法等。為了提高對于投影識別的精度,表面“編碼”的計算常常以投射多幅圖案的形式進行,即所謂“時域編碼”,并進一步將多種方法相互融合,結合先進的數字光線處理技術可以實現高精度的表面數據計算,實現工業級精密測量。這一技術具有精度高,表面數據獲取效率高,溯源性強的特點。
線激光三維掃描:便攜的“激光畫師”
線激光三維掃描儀主要使用激光線來進行物體表面編碼。與面結構光不同,線激光由于在整個面上并不連續,因此單次拍攝所投射出的激光線即可實現表面數據的計算。連續不斷地拍攝激光線所“掃過”的位置即可實現三維掃描。由于其投射的激光線區域相對較小,對激光器功率要求更低,單次拍攝時間較短,因此可以實現更小體積的手持式掃描。其具有便攜,使用方便,適用場景廣泛的特點。

ZEISS ATOS家族
ZEISS ATOS家族產品是結構光三維掃描領域的佼佼者,其結構光技術經過數十年的經驗積累,使其展現出出色的精度,高細節分辨能力,良好的設備穩定性,使其獲得了眾多用戶的認可。而面結構光的另一大問題在于如何使得投射出的光線在更大的范圍內仍然保持高亮度和均一性。ATOS家族產品中除了使用LED光源外,也克服了激光技術的一些問題,采用面激光實現了更高亮度的條紋投影,即ATOS 5X三維掃描儀,實現更大范圍的快速掃描。
由于面結構光三維掃描的“時域編碼”的特點,其更容易實現多圖像的采集,因此其對于部件特征的計算方法也更為多樣,如“灰度值特征”等方法都是基于面結構光所開發出來的。面結構光三維掃描儀也更容易實現對于薄壁部件的特征采集,結合其大測量范圍,可以更加快速地獲取完整的表面數據。因此廣泛地應用于包括汽車制造,消費電子,航空航天等諸多有著高質量要求的行業。
-
掃描儀
+關注
關注
2文章
396瀏覽量
67697 -
激光掃描儀
+關注
關注
1文章
131瀏覽量
10169 -
光學測量
+關注
關注
0文章
67瀏覽量
10369 -
3D掃描儀
+關注
關注
0文章
108瀏覽量
11446
發布評論請先 登錄
相關推薦
廣西掃描服務三維檢測三維掃描儀
Handyscan三維掃描儀對戶外大型燈箱三維掃描解決方案
Handyscan三維掃描儀機械零部件三維掃描抄數服務
SMARTSCAN三維掃描儀電子產品配件三維掃描服務
高精度三維藍光掃描儀超高精度三維激光掃描儀3D激光掃描儀設備




蔡司3D三維掃描儀激光抄數設備

德國蔡司工業級3D三維掃描儀抄數機





 工商網監
工商網監
評論