") 施耐德全新EtherCAT運(yùn)動(dòng)控制器M310介紹
施耐德全新EtherCAT運(yùn)動(dòng)控制器M310介紹
在制造業(yè)的蓬勃發(fā)展下,高性能運(yùn)動(dòng)控制器成為提升生產(chǎn)效率、保障產(chǎn)品質(zhì)量的關(guān)鍵設(shè)備之一。M310是施耐德電氣新一代高性能運(yùn)動(dòng)控制器,它基于Intel X86硬件平臺(tái)和Codesys V3.5 SP19軟件平臺(tái)開發(fā),支持EtherCAT總線,擁有強(qiáng)大算力、高易用性和高靈活度,提供最大16軸,32軸和64軸同步控制三種機(jī)型,為打造高端制造設(shè)備及自動(dòng)化產(chǎn)線提供了高性能的EtherCAT運(yùn)動(dòng)控制解決方案。
 施耐德全新EtherCAT運(yùn)動(dòng)控制器M310
施耐德全新EtherCAT運(yùn)動(dòng)控制器M310一、施耐德M310技術(shù)特點(diǎn)
1.超高性能:強(qiáng)大的運(yùn)算及運(yùn)動(dòng)控制能力
施耐德M310擁有強(qiáng)大的運(yùn)算及運(yùn)動(dòng)控制能力,其CPU處理速度高達(dá)3.3 ns/單條指令,同步控制周期分別可達(dá)16軸/250us,32軸/0.5ms,64軸/1ms,滿足了客戶對(duì)響應(yīng)速度、控制精度的不同需求。
2.便攜易用:基于Codesys 3.5 SP19軟件平臺(tái)開發(fā)
施耐德M310基于標(biāo)準(zhǔn)的Codesys3.5 SP19軟件平臺(tái)開發(fā),符合PLCopen和 IEC-61131-3標(biāo)準(zhǔn),支持運(yùn)動(dòng)控制功能和功能塊封裝,并支持LD/IL/FBD/ST/SFC/CFC等主流編程語言,用戶可以方便地利用標(biāo)準(zhǔn)編程語言和工具開發(fā),不僅節(jié)省時(shí)間,還能根據(jù)實(shí)際需求進(jìn)行深度開發(fā),實(shí)現(xiàn)更廣泛的應(yīng)用場(chǎng)景。
 施耐德全新EtherCAT運(yùn)動(dòng)控制器M310
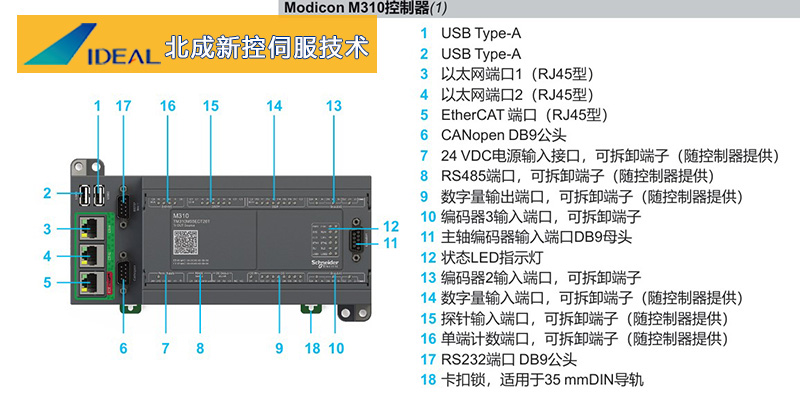
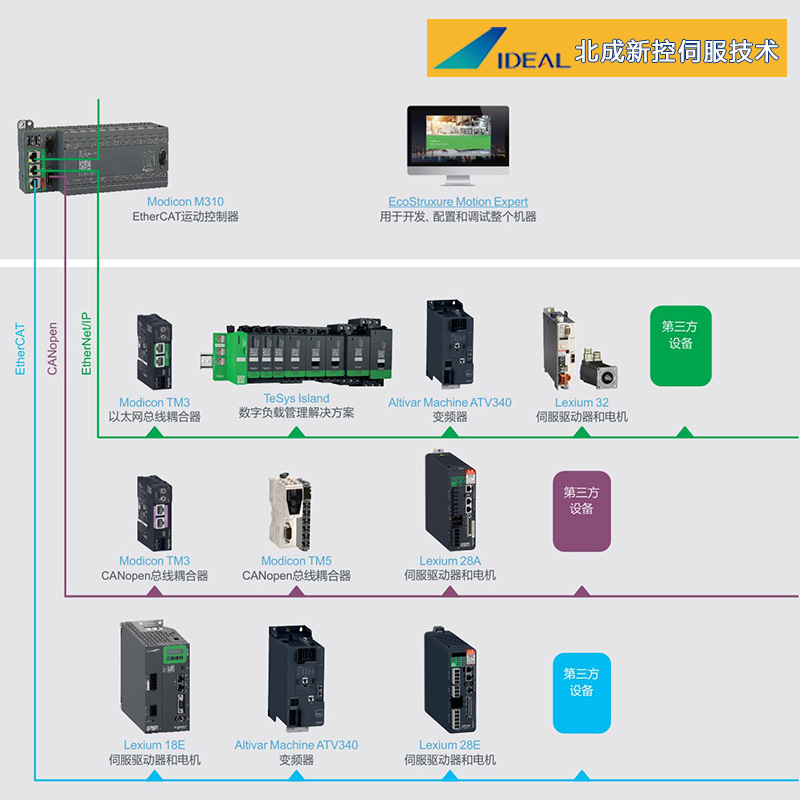
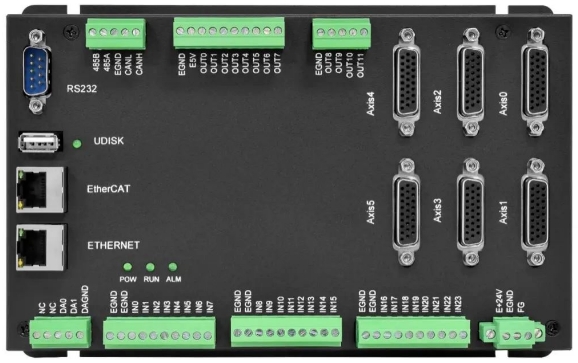
施耐德全新EtherCAT運(yùn)動(dòng)控制器M310施耐德M310提供了豐富的嵌入式通訊接口,包括以太網(wǎng)、EtherCAT、CANopen、RS485和1個(gè)RS232C等等,不僅提高了邏輯控制和運(yùn)動(dòng)控制應(yīng)用的靈活性,還能無縫嵌入現(xiàn)有的施耐德電氣或第三方控制系統(tǒng),實(shí)現(xiàn)數(shù)據(jù)的實(shí)時(shí)傳輸和共享,輕松適應(yīng)各種復(fù)雜的工業(yè)自動(dòng)化環(huán)境。
? 2個(gè)獨(dú)立千兆RJ45以太網(wǎng)端口,支持EtherNet/IP、 Modbus TCP
? 1個(gè)百兆R(shí)J45 EtherCAT端口
? 2個(gè)串口(1個(gè)RS485和1個(gè)RS232C),支持 Modbus RTU/ASCII主站和/Modbus RTU從站
? 1個(gè)CANopen主站端口,最大工作頻率1Mbps
? 1個(gè)主軸編碼器輸入/2個(gè)增量型編碼器輸入
 施耐德全新EtherCAT運(yùn)動(dòng)控制器M310
施耐德全新EtherCAT運(yùn)動(dòng)控制器M310二、施耐德M310在雙頭灌裝旋蓋機(jī)的應(yīng)用
施耐德M310在工業(yè)自動(dòng)化領(lǐng)域應(yīng)用廣泛,如包裝、電子電工、機(jī)加工等行業(yè)。施耐德M310在雙頭灌裝旋蓋機(jī)上的應(yīng)用,實(shí)現(xiàn)了灌裝和旋蓋過程的精準(zhǔn)控制,確保了產(chǎn)品的穩(wěn)定性和一致性,提高了生產(chǎn)效率。未來,北京北成新控將繼續(xù)攜手施耐德電氣,為工業(yè)自動(dòng)化打造高適配性、高穩(wěn)定性的運(yùn)動(dòng)控制系統(tǒng)解決方案。
北京北成新控伺服技術(shù)——臺(tái)灣apex減速機(jī),ABB伺服電機(jī)、變頻器,日本哈默納科減速機(jī)、執(zhí)行元件北京核心代理商!提供人機(jī)界面,運(yùn)動(dòng)控制,交直流驅(qū)動(dòng),機(jī)械傳動(dòng),光柵測(cè)量成套運(yùn)動(dòng)控制技術(shù)解決方案!
-
控制器
+關(guān)注
關(guān)注
112文章
16206瀏覽量
177427 -
運(yùn)動(dòng)控制器
+關(guān)注
關(guān)注
2文章
393瀏覽量
24657 -
施耐德
+關(guān)注
關(guān)注
5文章
154瀏覽量
23793 -
ethercat
+關(guān)注
關(guān)注
18文章
655瀏覽量
38606
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
運(yùn)動(dòng)控制器/運(yùn)動(dòng)控制卡的EtherCAT總線ZMIO310擴(kuò)展模塊使用
脈沖全閉環(huán)EtherCAT運(yùn)動(dòng)控制器的固件升級(jí)


EtherCAT運(yùn)動(dòng)控制器上位機(jī)開發(fā)之Python+Qt(二):回零# 正運(yùn)動(dòng)技術(shù)# 運(yùn)動(dòng)控制器# 運(yùn)動(dòng)控制
EtherCAT運(yùn)動(dòng)控制器與PLC的區(qū)別
什么是EtherCAT運(yùn)動(dòng)控制器?它有哪些特點(diǎn)?
全能型施耐德可編程控制器M241介紹

多軸高性能EtherCAT總線運(yùn)動(dòng)控制器ZMC408CE硬件介紹

運(yùn)動(dòng)控制卡/運(yùn)動(dòng)控制器的ZCAN總線ZMIO310擴(kuò)展模塊使用

EtherCAT運(yùn)動(dòng)控制器在LabVIEW中的運(yùn)動(dòng)控制與實(shí)時(shí)數(shù)據(jù)采集
EtherCAT運(yùn)動(dòng)控制器在ROS上的應(yīng)用開發(fā)案例(下)

EtherCAT運(yùn)動(dòng)控制器在ROS上的應(yīng)用開發(fā)案例(上)

EtherCAT運(yùn)動(dòng)控制器在ROS上的應(yīng)用(下)

EtherCAT運(yùn)動(dòng)控制器在ROS上的應(yīng)用(上)
凌華科技基于軟件控制的EtherCAT運(yùn)動(dòng)控制器






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論