 Segwa平衡車DIY ,教你玩轉都市交通工具
Segwa平衡車DIY ,教你玩轉都市交通工具
“賽格威”(英語:Segway)是一種電力驅動、具有自我平衡能力的個人用運輸載具,是都市用交通工具的一種“賽格威”是一種讓人留下深刻印象的代步工具,它占地不足一平方米,乘車人像使用滑板一樣站立其上,雙手解放,但卻可以僅通過身體移動改變重心位置,就進行前進后退,轉彎剎車等操作。傳統的交通工具都無法做到隨心而動,必須把大部分精力放在控制方向和速度上,而“賽格威”并不需要專門的操控裝置,一切由車身自主完成,也由此獲得了“平衡車”的別名。賽格威”平衡車看來神奇,但你有沒有發現它的原理其實很簡單呢?拜最新科技所賜,關鍵零件都可以在淘寶上直接買到,而控制程序也可以查閱原理自行編寫。擁有自己的平衡車,其實非常簡單。
倒立擺和機器人
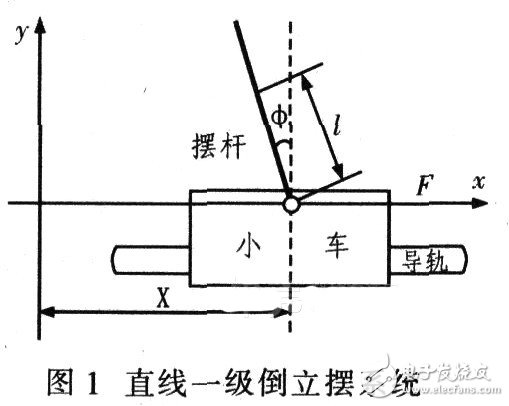
“賽格威”的平衡問題,實際上是一個多級倒立擺問題。當一個人用手托住一根竹竿的底部使它在空中豎直不倒下,這就是一個一級倒立擺系統的模型。如果第一根竹竿上面用鉸鏈連著其他竹竿,或者竹竿本身具有一定的彈性(可比擬“賽格威”上的有骨骼和關節的大活人),就成了多級倒立擺。
用手撐竹竿的游戲很多人都玩過,印象最深的應當是它是一個靜不穩定系統。在桌面上的水杯能自己站穩,當重心投影落于杯底內時,即使有細小擾動也不會倒下。但是手心里的竹竿大部分時間重心投影不在接觸點上,讓竹竿保持相對不動靠的是動態調整——竹竿往哪邊倒,手就趕緊往哪邊湊,讓重心回到接觸點周圍。這就是依靠人眼,大腦和人手完成的動態平衡過程。
人類的大腦在處理這類問題上有先天優勢,因為人的走路過程本質上來說是不斷前跌的過程,必須依靠實時伸出支撐腳轉移重心來保證直立行進的動態平衡。而讓機器人做到這一點就很困難,需要綜合解決動態控制過程中的線性問題、魯棒性問題、鎮定問題、隨動問題以及跟蹤問題等諸多細節——所以至今見到的人形機器人里,能僵硬走路的很多,但能和真人一樣上躥下跳的絕無僅有。
兩名民警駕駛“賽格威”單人警用巡邏車巡邏
“賽格威”的動態平衡原理和倒立擺相同,將最上方的乘客作為擺臂,然后控制車輪維持系統重心使乘客直立。當駕駛人改變自己身體的角度往前或往后傾時,“賽格威”就會根據傾斜的方向前進或后退,而速度則與駕駛人身體傾斜的程度呈正比以保持平衡。這里的一個巧妙設計是將乘客傳感和控制二合一了 ——“賽格威”前進或后退維持平衡的同時,也達成了按乘客意圖前進或后退的目的。最終,熟練的駕駛人可以和自己行走一樣,僅憑直覺就能完成前后左右各方向的運動,同時解放雙手和大腦思維,這一特點使“賽格威”特別適合游覽和警用巡邏。
機械部分
此次設計的機械機構包括一個簡單的獨立懸掛。緩沖部分直接采用自行車的避震器(需要更換彈簧),機體做得不很緊湊,主要為了能夠拆卸折疊,便于收放和運輸。(需要說明的是,結構已提交專利申請,請勿用于商業用途。)整機材料很簡單,兩個獨立驅動的輪子+電機驅動板+車身角度傳感器+轉彎傳感器+電池+一個裝下這些東西的盒子 。兩個輪子、電機、避震器都是來自淘寶的成品。鈑金和機加件為單獨加工。
這里貼一些制作圖片,詳細的零件工程圖列在最后。
整機外形
DIY自己的“賽格威”
和人類行走一樣,“賽格威”的控制也需要傳感器和致動 器。它依靠MEMS技術制造的精密固態陀螺儀和加速度計感應車體的旋轉,速度和傾斜,高速微處理器計算傳感器數據,并驅動輪轂電機完成前進/后退/差速轉 彎的動作。而在電路之外,為了讓它從實驗室中的倒立擺變成實用的代步車,還需要準備一些必需的結構零件和附件。
結構細節
電機安裝部分
電機為優耐特電機,250W,24v/質量不好,不作推薦。
裝配過程
鋰電池倉
原設計為鉛酸電池,后一朋友為我無償提供了鋰電池,在此再次表示感謝。
整體安裝
電路部分
主控采用AVR的ATMEGA_32,電機驅動為H橋驅動方式,元件選用的IR2184和IRF1405。傳感器選用IDG300和ADXL335,電流傳感器為ACS755。另外還有一些外圍的小功能,可有可無,不詳述了。
控制驅動PCB圖
傳感器PCB圖
PCB空板
焊接需要注意的就是——別太馬虎就行。先焊低矮的元器件,再焊大個的!
焊接基本完成
連接電機測試
車身角度獲取
選用的傳感器為模擬量輸出,因此只需要用單片機的AD采集數據后計算出角度值即可,需要注意的是,采集后 的數據直接使用效果會很糟糕。需要再次進行濾波計算,得到一個準確、及時、抗擾動的真實角度數據。調速過程中可以用串口將數據輸出,輔助調試。這里就是簡 單的PID控制車輪轉速,如果不記得就百度看看。調試參數會花點時間,剛開始參數別調過大,否則抖動起來有危險!另外需要設置角度過大停機的功能。轉向數 據為采集轉向電位器而來,采集后的數據進行濾波處理后再用。轉向中間設置一個無效的死區,也是防止誤動作。
散熱器:
遙控和語音模塊
控制程序部分
果殼網友們的素質都很高,這里就提一些關鍵部分。一些個人認為有用的代碼附在最后。
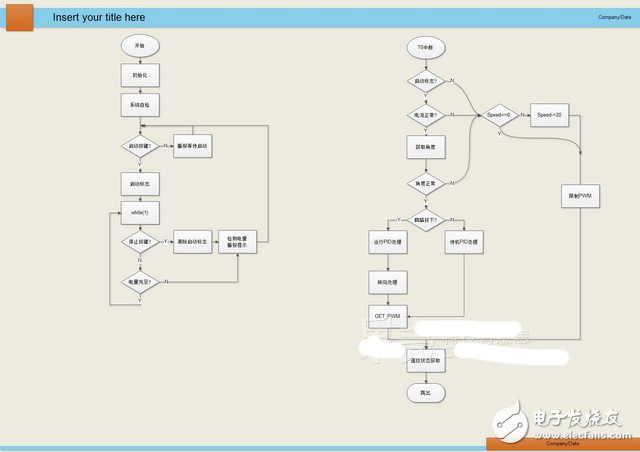
流程圖
遙控
硬件原先選用18b20,很是遺憾這部分程序沒調通,可能原因1:系統必須有多處中斷,并且中斷服務程序比較多,因而打亂了18b20的時序,加上沒有示波器,因而沒調通。可能原因2:智商問題。嘗試調試了近2小時無果后改用模擬量溫度芯片LM35D,電壓直接由電阻分壓而來。其余部分可自由發揮。
友情提示:此車有一定危險性,不排除摔倒、失控等問題,在空地上玩玩就好,打算用來代步上班的,請給自己買好保險!
-
電機驅動
+關注
關注
60文章
1205瀏覽量
86618 -
智能硬件
+關注
關注
205文章
2341瀏覽量
107432 -
電動平衡車
+關注
關注
1文章
18瀏覽量
10055
發布評論請先 登錄
相關推薦
雙輪平衡車(B酷DIY)
超炫酷的未來交通工具,讓你看傻眼
超炫酷的未來交通工具,你看傻眼沒?
平衡車出世到禁止上路,既然都是因為他們...............
教你DIY一輛自己的賽格威平衡車
從李亞鵬送王菲的電動平衡車看陀螺儀應用
【直播課件】【平衡車】電機芯課堂:玩轉平衡車控制方案
【直播課件】【平衡車】電機芯課堂:玩轉平衡車控制方案
玩轉OpenHarmony PID:教你打造兩輪平衡車
平衡車到底是交通工具還是玩具?
奧迪披露汽車和無人機的新型概念交通工具
飯仔DIY --《平衡車之硬件制作》






 工商網監
工商網監
評論