 集聚5種操作系統,米爾瑞米派168元帶回家
集聚5種操作系統,米爾瑞米派168元帶回家
米爾電子發布的瑞薩第一款MPU生態板卡-瑞米派(Remi Pi),采用瑞薩RZ/G2L雙核A55芯片,接口豐富,全面兼容樹莓派的擴展模塊。瑞米派支持五種系統,兼顧學習開發和項目產品需要。軟件提供五種軟件系統分別為:基于Yocto構建的兩種系統,一種是支持通用功能的精簡型系統,另一種是帶有Qt和豐富Linux命令集的全面型系統;還有Ubuntu系統、Debian系統和ROS 2系統。

以下為5種系統的具體介紹:
系統 | 概述 |
| myir-image-Core | 精簡型系統,支持通用功能,EtherCAT運行庫以及LVGL軟件 |
| myir-image-Full | 全面型系統,包含豐富的Linux命令集,Qt 5.15.0運行庫,Python 3.8.14組件及Measy HMI 2.0軟件 |
| myir-image-Ubuntu | Ubuntu 22.04系統,支持通用功能,LXDE界面 |
| myir-image-Debian | Debian 12.5系統,支持通用功能,XFCE界面。 |
| myir-image-ROS | 基于Ubuntu 22.04的ROS 2 |
myir-image-Core:
基于Yocto構建帶有LVGL界面的鏡像,包含完整的硬件驅動,常用的系統工具,調試工具等。支持使用Shell, C/C++進行應用開發。
EtherCAT運行庫支持實時以太網通信協議,適合需要快速和可靠的數據交換的應用。
LVGL是一個開源圖形庫,用于創建嵌入式用戶界面,支持低資源消耗和高度定制化。輕量級,適用于多種工業場景、醫療設備等。
該系統的發布旨在為用戶提供一個精簡,小巧,便捷的操作系統,方便用戶集成自己工具
瑞米派Core系統LVGL界面展示
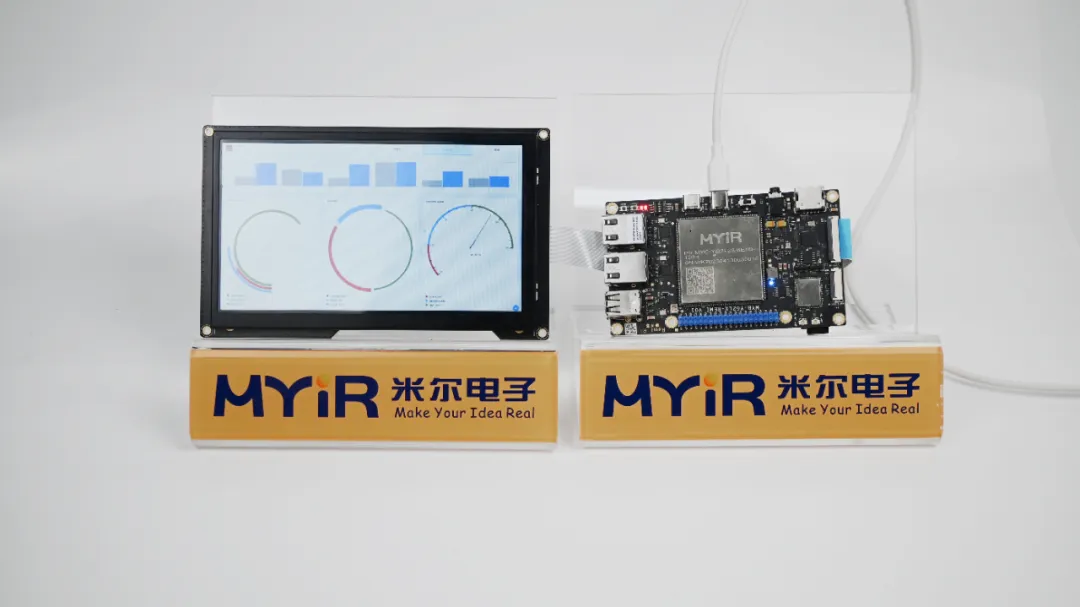
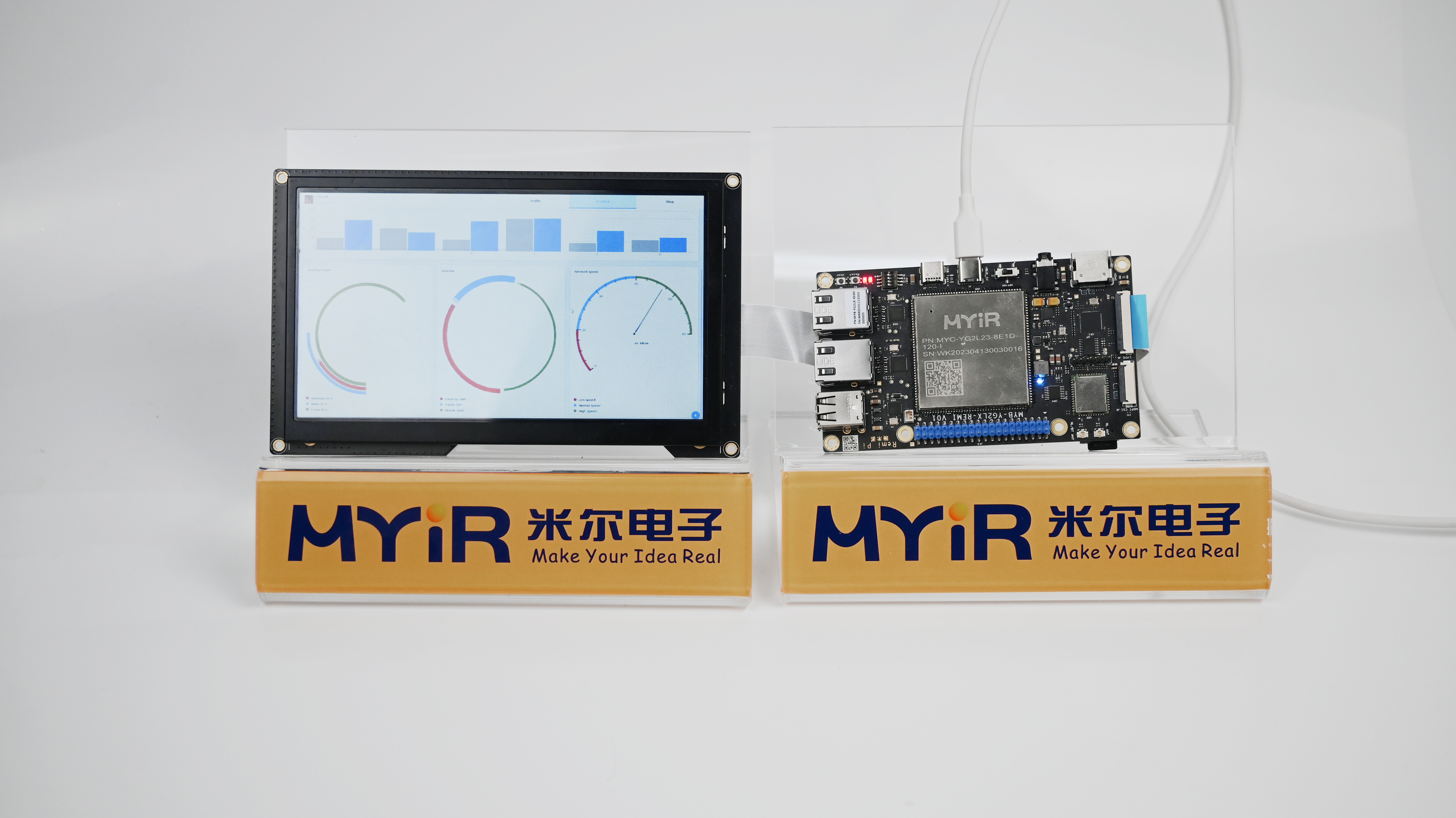
myir-image-Full:
基于Yocto構建的帶有GUI界面的鏡像,包含Core中所有的完整的硬件驅動,常用的系統工具,調試工具等,包含Qt運行時庫和基于Qt開發的HMI界面。支持使用 Shell, C/C++, QML, Python進行應用開發。其包含豐富的Linux命令集,可滿足用戶進行高級系統管理和定制,Qt和Python的支持使得開發復雜的圖形用戶界面和應用程序變得更加容易,而Measy HMI 2.0軟件則為用戶提供了現代化的人機界面設計和控制能力。為用戶提供一個功能全面,穩定的系統進行開發。
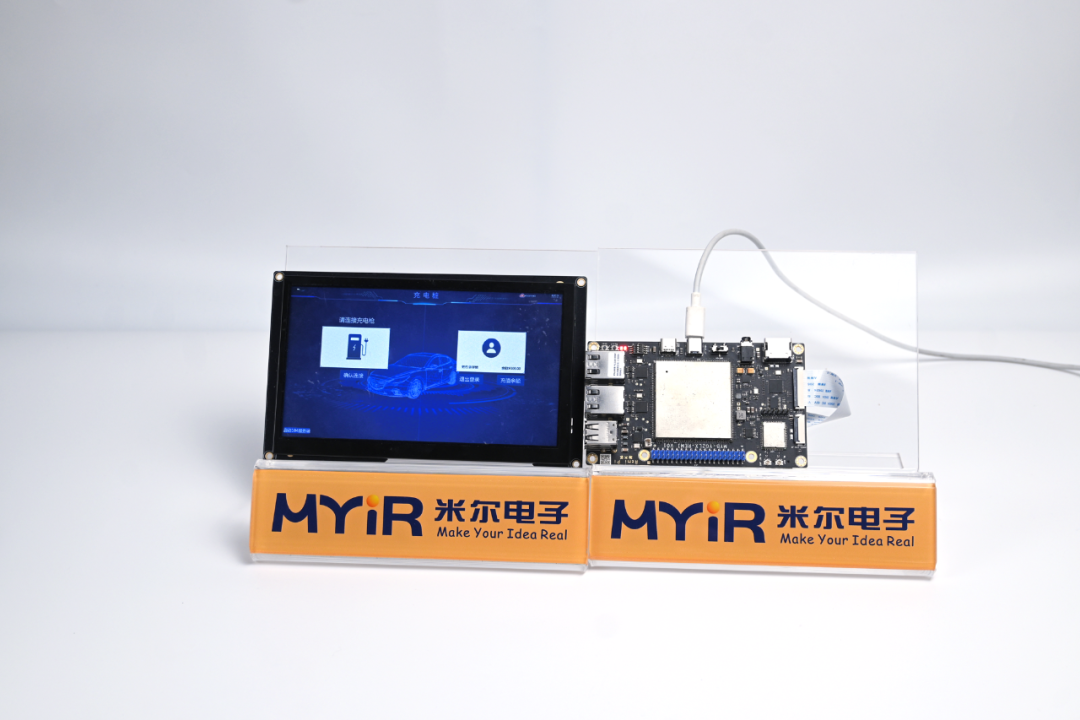
瑞米派Full系統Qt HMI界面展示
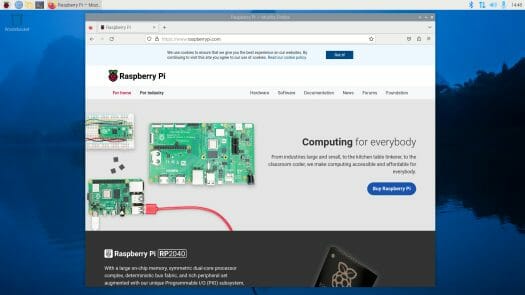
myir-image-Ubuntu:
瑞米派上的Ubuntu系統是一款功能強大的操作系統,為用戶提供了穩定、安全和靈活的計算體驗。作為一個開源系統,在瑞米派平臺上,集成Ubuntu系統帶來了許多優勢。提供的工具和應用程序滿足各種需求,其強大的LXDE桌面系統供了許多實用的功能,它具備快速啟動和關閉應用程序的能力,提供了易于定制的面板和菜單,使用戶能夠根據自己的喜好進行個性化設置。此外,它還支持多任務處理、文件管理和網絡連接等常用功能,方便用戶進行快速開發。
米爾提供的基于Ubuntu 22.04 core架構制作而成的帶LXDE的系統myir-image-Ubuntu ,包涵通用的命令工具和網站的硬件驅動,適合需要輕量級桌面環境的用戶。

瑞米派Ubuntu系統 LXDE桌面展示
myir-image-Debian:
瑞米派發布了一款精簡、專業而豐富的操作系統——Debian。作為一種廣受歡迎的Linux發行版,Debian憑借其穩定性和安全性,成為眾多用戶的首選。瑞米派的Debian系統提供了一個強大而靈活的基礎,讓您可以根據自己的需求進行定制。瑞米派的Debian系統中已經配置了各種功能外設,比如網絡,USB,WiFi,音視頻等,用戶可直接進行使用。此外,瑞米派的Debian操作系統還帶輕量級的XFCE桌面環境,為用戶提供高效、穩定和易用的桌面體驗。無論您是一位技術專家,還是剛入門的新手,瑞米派都將成為您的最佳伴侶。它的穩定性、安全性和靈活性將為您帶來無限的可能性。

瑞米派Debian系統XFCE桌面展示
myir-image-ROS:
在瑞米派上我們推出了ROS 2系統,提供了強大的工具和庫,使開發人員能夠快速構建靈活、可靠且高效的機器人系統。ROS 2在瑞米派平臺上的應用提供了許多關鍵功能和優勢。首先,ROS 2采用了一種分布式架構,支持多個節點以及節點間的通信。這使得不同的模塊可以并行運行,實現更高的性能和可擴展性。此外,該系統在瑞米派中還引入了更強大的通信和控制機制,包括可靠的發布/訂閱模型和服務模型,海龜仿真等,您可以輕松體驗瑞米派ROS 2系統給你帶來的開發體驗。

瑞米派ROS 2系統節點通信展示
系統 | 功能項 | 文件名 |
Ubuntu | Ubuntu 22.04 base | Ubuntu-base-22.04-base-arm64.tar.gz |
啟動管理 | Xinit | |
網絡管理 | network-manager network-manager-gnome | |
音頻管理 | Xine | |
視頻播放器 | Xine | |
Debian | Debian 22.04 base | Debian-base-22.04-base-arm64.tar.gz |
啟動管理 | Xinit | |
網絡管理 | network-manager network-manager-gnome | |
音頻管理 | Xine | |
視頻播放器 | Xine | |
ROS | Ubuntu 22.04 base | Ubuntu-base-22.04-base-arm64.tar.gz |
啟動管理 | Xinit | |
網絡管理 | network-manager |
表1 Ubuntu、Debian、ROS資源列表
類別 | 名稱 | 描述 |
源碼 | Flash-Writer | Flash-Writer 1.06 |
TF-A | Arm Trusted Firmware 2.6 | |
Bootloader | U-boot 2021.10 | |
Kernel | Linux Kernel 5.10.83 | |
Yocto | Yocto 3.1.20 | |
文件系統 | myir-image-Core | Yocto構建的文件系統 |
myir-image-Full | Yocto構建的文件系統 | |
myir-image-Ubuntu | Ubuntu 22.04 core構建的文件系統 | |
myir-image-Debian | Debian構建的文件系統 | |
myir-image-ROS | Ubuntu 22.04 core構建的文件系統 | |
工具 | 開發工具 | sdk.tar.bz2、e2 studio |
燒錄工具 | Win32DiskImager、teraterm | |
文檔 | Remi Pi_Linux BSP與系統移植指南 | 包含Linux BSP與系統移植 |
Remi Pi_Linux軟件評估指南 | 介紹使用Yocto項目安裝運行Linux系統以及嵌入式 Linux驅動和應用程序的開發流程 | |
Remi Pi_Linux軟件開發指南 | 包含源碼編譯,燒錄等 | |
Remi Pi FreeRTOS應用開發筆記 | 包含環境搭建,工程創建等 | |
Remi Pi實時系統與EtherCAT移植應用筆記 | 包含RTlinux、EtherCAT移植 | |
Remi Pi_Ubuntu系列移植指南 | 包含Ubuntu移植 | |
Remi Pi_Debian系列移植指南 | 包含Debian移植 | |
Remi Pi_ROS系列移植指南 | 包含ROS移植 |
表2 軟件資料
關于Remi Pi的五個系統,用戶購買后可以獲取更詳細的相關資料。
-
操作系統
+關注
關注
37文章
6488瀏覽量
122588 -
板卡
+關注
關注
3文章
85瀏覽量
16658 -
MPU
+關注
關注
0文章
328瀏覽量
48532 -
米爾電子
+關注
關注
0文章
84瀏覽量
409
發布評論請先 登錄
相關推薦
端午好禮丨米爾喊你抽獎啦!NXP i.MX開發板、吸塵器、定制背包等你帶回家

2024瑞薩技術交流日進行中,米爾誠邀您參觀
瑞米派Ubuntu系統移植指南-米爾RemiPi
【米爾-瑞米派兼容樹莓派擴展模塊-試用體驗】值得擁有的米爾-瑞米派兼容樹莓派生態板
【米爾-瑞米派兼容樹莓派擴展模塊-試用體驗】測試安裝VNC遠程桌面
【米爾-瑞米派兼容樹莓派擴展模塊-試用體驗】米爾瑞米派Remi Pi系統與Ethercat移植
【米爾-瑞米派兼容樹莓派擴展模塊-試用體驗】用視頻來了解這塊生態板_米爾-瑞米派兼容樹莓派擴展模塊
【米爾-瑞米派兼容樹莓派擴展模塊-試用體驗】初始開發板_米爾-瑞米派兼容樹莓派擴展模塊
【米爾-瑞米派兼容樹莓派擴展模塊-試用體驗】基于ROS系統的三麥輪小車自主導航
米爾更新面向工業產品的軟件系統-基于瑞米派(Remi Pi)
樹莓派宣布基于 Debian12“書蟲”的樹莓派操作系統新版本





 工商網監
工商網監
評論