 機器人神經網絡控制原理是什么
機器人神經網絡控制原理是什么
- 引言
機器人技術是當今科技發展的重要方向之一,其應用領域涵蓋了工業、醫療、農業、軍事等多個方面。機器人控制技術是實現機器人自主化和智能化的關鍵技術之一。傳統的控制方法,如PID控制、自適應控制等,雖然在某些應用場景下取得了較好的效果,但在面對復雜、不確定和動態變化的環境時,其性能往往受到限制。神經網絡作為一種模擬人腦神經元網絡的計算模型,具有強大的非線性映射能力和自適應學習能力,被廣泛應用于機器人控制領域。
- 神經網絡的基本概念
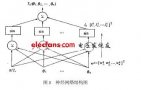
2.1 神經元模型
神經網絡的基本單元是神經元,神經元是模擬人腦神經元的計算模型。一個神經元通常由輸入、加權求和、激活函數和輸出四個部分組成。輸入是神經元接收的信號,加權求和是輸入信號與權重的乘積之和,激活函數是將加權求和的結果進行非線性變換,輸出是激活函數的輸出結果。
2.2 網絡結構
神經網絡通常由輸入層、隱藏層和輸出層組成。輸入層負責接收外部信號,隱藏層負責對輸入信號進行非線性變換和特征提取,輸出層負責生成控制信號。神經網絡的層數和神經元數量可以根據具體應用進行調整。
2.3 學習算法
神經網絡的學習算法是其核心部分,主要用于調整網絡中的權重和偏置參數。常見的學習算法有反向傳播算法(BP算法)、徑向基函數網絡(RBF)算法、自適應共振理論(ART)算法等。學習算法的目標是使網絡的輸出盡可能接近期望輸出,從而實現對機器人的精確控制。
- 神經網絡的特點
3.1 非線性映射能力
神經網絡具有很強的非線性映射能力,可以處理復雜的非線性問題。這使得神經網絡在機器人控制領域具有很大的優勢,尤其是在面對復雜、不確定和動態變化的環境時。
3.2 自適應學習能力
神經網絡具有自適應學習能力,可以根據輸入信號的變化自動調整網絡參數,實現對機器人的自適應控制。這使得神經網絡在機器人控制領域具有很好的魯棒性和適應性。
3.3 并行處理能力
神經網絡具有并行處理能力,可以同時處理多個輸入信號,提高計算效率。這使得神經網絡在實時控制領域具有很大的優勢。
3.4 容錯能力
神經網絡具有一定的容錯能力,即使部分神經元損壞,網絡仍然可以正常工作。這使得神經網絡在機器人控制領域具有很好的穩定性和可靠性。
- 神經網絡在機器人控制中的應用
4.1 機器人運動控制
機器人運動控制是神經網絡在機器人控制領域的主要應用之一。通過訓練神經網絡,可以實現對機器人關節角度、速度和加速度的精確控制,提高機器人的運動性能和穩定性。
4.2 機器人路徑規劃
機器人路徑規劃是神經網絡在機器人控制領域的另一個重要應用。通過訓練神經網絡,可以實現對機器人在復雜環境中的路徑規劃和避障,提高機器人的自主性和安全性。
4.3 機器人視覺控制
機器人視覺控制是神經網絡在機器人控制領域的新興應用。通過訓練神經網絡,可以實現對機器人的視覺識別和目標跟蹤,提高機器人的感知能力和交互能力。
4.4 機器人自適應控制
機器人自適應控制是神經網絡在機器人控制領域的高級應用。通過訓練神經網絡,可以實現對機器人在不同環境和任務下的自適應控制,提高機器人的靈活性和魯棒性。
-
機器人
+關注
關注
210文章
28196瀏覽量
206509 -
神經網絡
+關注
關注
42文章
4762瀏覽量
100535 -
計算模型
+關注
關注
0文章
29瀏覽量
9824 -
輸入信號
+關注
關注
0文章
446瀏覽量
12536
發布評論請先 登錄
相關推薦
一種基于模糊神經網絡的機器人控制技術

嵌入式模擬智能機器人
機器人神經網絡逆系統阻抗控制方法研究
基于寬度神經網絡的微型仿魚機器人運動控制方法






 工商網監
工商網監
評論